











------

------
教程安装
|
|

控制
|
|

自主导航
|
|

MoveIt!
|
|
OpenCV
|
|
点云
|
|

------
一张图片胜过千言万语:
教程
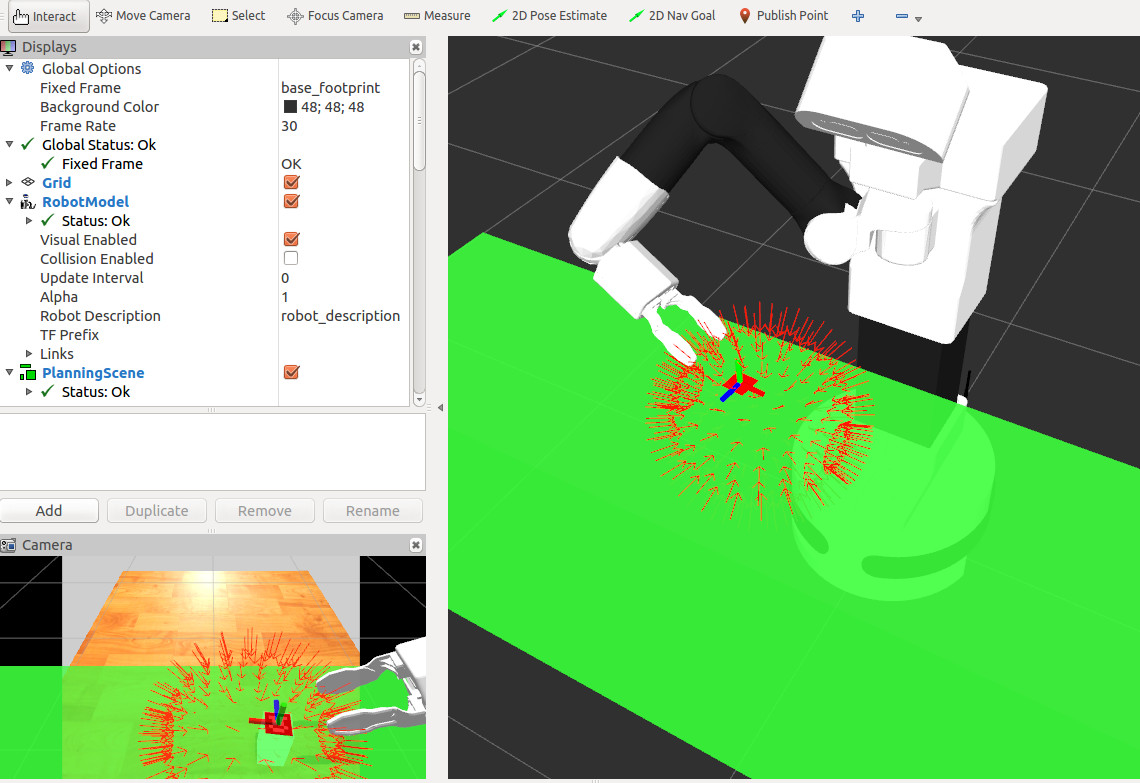
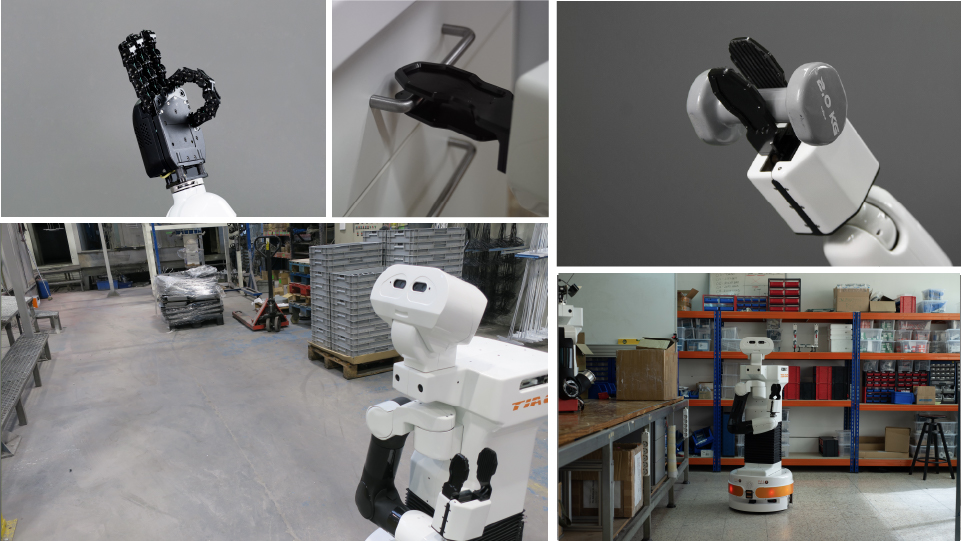
TIAGo机器人在机器人/ TIAGo /教程中提供了一套全面的教程。教程使用Gazebo模拟器,目前包含如何使用OpenCV,PCL,自主导航,MoveIt的教程!和人机器人互动。
公共仿真包概述
本节概述了在TIAGo的公共模拟中使用的软件包,以及指向描述软件包的相应wiki页面的链接。有关软件包的安装说明,请参考TIAGo模拟安装教程。
机器人模型
| 零件 | ROS包/堆栈 |
| 机器人模型(URDF) | |
| 移动基本模型(URDF) | |
| 夹具模型(URDF) | |
| Hey5手模型(URDF) |
模拟文件
| 机器人带来的文件 | |
| 机器人凉亭模型,世界和启动脚本 | |
| Gazebo的机器人控制器配置 | |
| Gazebo的移动基础控制器配置 | |
| Gazebo插件 |
公共航海
| 零件 | ROS包/堆栈 |
| 导航配置和启动文件 | |
| 导航元包 | |
| 映射和定位状态机 |
硬件用于仿真的驱动程序
| 零件 | ROS包/堆栈 |
| 硬件驱动程序 |
消息
| 零件 | ROS包/堆栈 |
| PAL特定消息 |
控制器
| 零件 | ROS包/堆栈 |
| ros_control覆盖 | |
| ros_controllers覆盖 | |
| gazebo_ros_control overlay |
高级功能
| 零件 | ROS包/堆栈 |
| 播放预定义的动作 | |
| 点头动作 | |
| MoveIt!包 | |
| ArUco标记检测 |
相关存储库
------
------

















 1200
1200

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









