










即On Degeneracy of Optimization-based State Estimation Problems论文理解。
一、前言
无论是在激光还是在视觉SLAM中,当遇到特征点稀少的场景(空旷、低纹理等)时,都有可能导致退化。那如何解决呢?一般两种思路,一种是根据环境信息来检测是否退化,检测出退化后采用多传感器互补融合。另一种是在求解优化问题时,检查优化过程中是否发生退化,检测到退化后对求解过程进行修改,zhang ji的论文就是第二种思路。
二、问题描述
论文中是通过对状态空间中约束结构的研究,来估计状态估计优化问题中的退化现象。
定义x为一个n*1的状态向量,状态估计问题通常如下:

无论问题(1)是线性还是非线性的,我们都可以将其转换成一个线性问题。因此论文直接针对线性问题进行研究,定义如下:

给定式(3),计算出是否退化以及退化方向,避免发生退化时,退化方向对解产生错误影响。这里有两个假设:
1.假设考虑传感器的噪声,对矩阵A进行适当的加权。
2. 假设满秩。不退化时,状态估计由传感器真实测量决定。
三、退化估计
1. 退化因子(degeneracy factor)
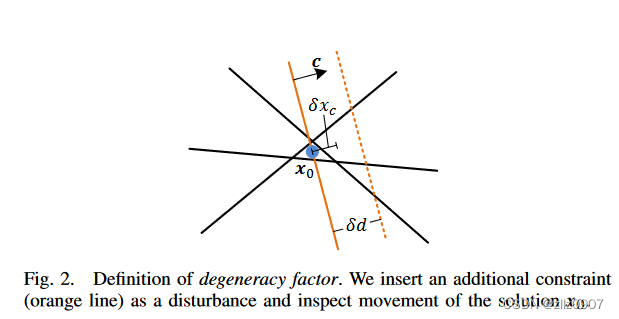
图中黑线代表式(3)中的约束,蓝色点代表真值解,橙色线经过真值解,是为了验证系统退化性,随机插入的约束。
给定橘色线的约束 ,方向不固定。沿着c的方向移动δd的距离,δxc移动的距离最大的方向即为退化方向。相当于在某个方向给个扰动,哪个方向的扰动使真值产生最大的偏差,哪个方向就是退化方向。
2. 退化因子D是A的函数,与b无关。公式证明见论文,涉及到左右伪逆的计算,不难看懂。
3. 对于线性系统(3),D = λmin + 1,其中.λmin是A^T * A的最小特征值,证明过程用到了Rayleigh quotient。
结论:对于线性系统(3),求解A^T * A的特征值和特征向量,当特征值小于一定阈值时,其所对应的特征向量即为退化方向。
四、退化处理
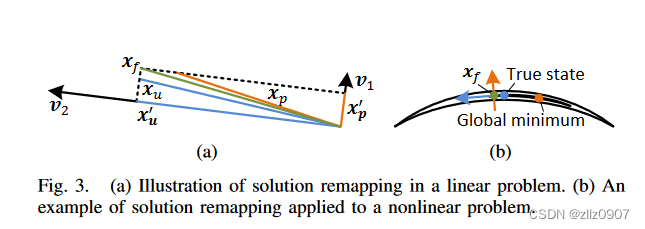
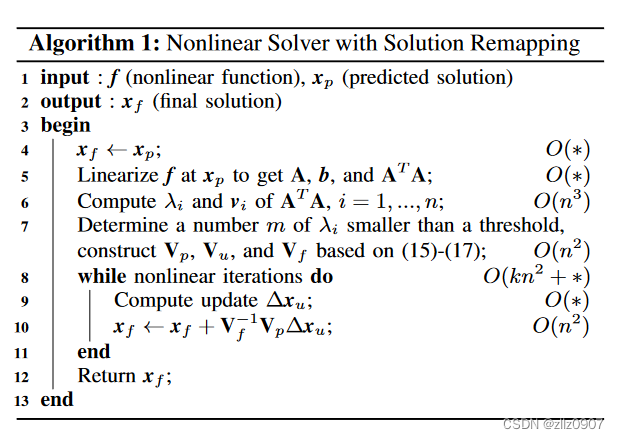
在求出退化方向之后,需要对相应方向的增量进行处理,避免影响求解。核心思想是,当检测到退化时,退化方向使用预测值(xp),非退化方向使用更新值(xu),二者相加。

整个处理流程如下:
五、参考
1. 《On Degeneracy of Optimization-based State Estimation Problems》
3. LOAM SLAM原理之防止非线性优化解退化-CSDN博客
4. SLAM中状态估计优化退化问题(degraded optimization problem)浅析和源码实现_slam退化问题-CSDN博客

















 2713
2713

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









