




1. 现场ABB机器人若希望绕当前tcp坐标系旋转,可以使用reltool函数,例如
2. ptmp1:=reltool(phome1,0,0,0\x:=30,\z:=30)表示沿当前工具坐标系xyz平移均为0,绕当前工具坐标系的x轴旋转30度,再绕当前工具坐标系的z轴旋转30度。
3. 使用reltool时,若同时指定两个或三个旋转,则旋转将以如下顺序执行:围绕x轴旋转
围绕新y轴旋转,围绕新z轴旋转(与标准欧拉角zyx顺序不一样)
4. ABB机器人的点位robtarget类型数据使用四元数表示点位姿态。对于姿态数据orient,可以直接使用*进行运算。
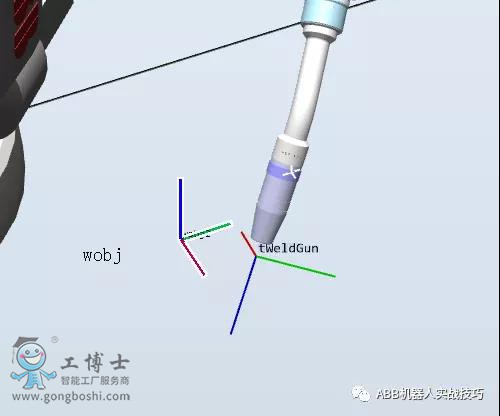
5. 若在原来姿态基础上右乘新的姿态,则相当于绕当前tcp的坐标系旋转(顺序为zyx);若在原来姿态基础上左乘新的姿态,则相当于绕固定坐标系wobj旋转(顺序为zyx)
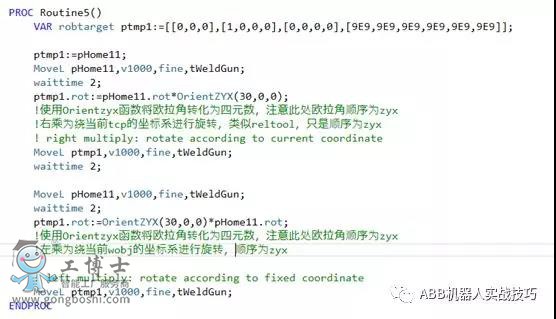
6. 运行上述代码的右乘后,机器人绕当前tcp的z轴旋转了30°

7. 运行上述代码的左乘后,相当于tcp绕当前工件坐标系的z轴旋转了30度。
由上可知,ABB机器人旋转类型默认按一下旋转顺序 围绕X轴旋转 围绕新y轴旋转,围绕新z轴旋转,即Halcon中的Rgba旋转类型
对于库卡机器人,根据手册《库卡编程详解》如下所述,为Rabg


















 883
883

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









