






机器人运动学_不同D-H矩阵的对比
edit by XZF
在机器人学的运动学分析中,D-H矩阵是正运动学分析的基础,而对于如何建立D-H举证的连杆坐标系,有不同的方法,本文主要介绍其中的两种,并对这两种方法做下对比与分析。
一、将连杆坐标系的原点建立在连杆的关节连杆首端。
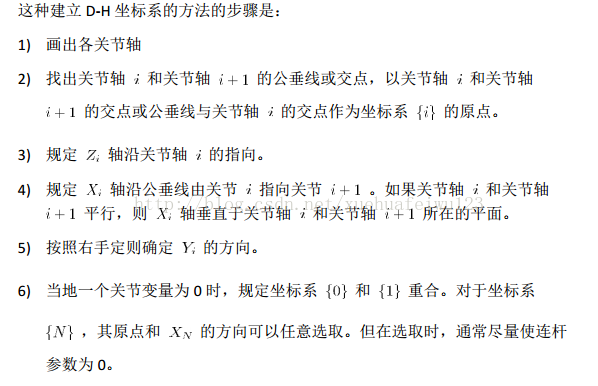
这种建立D-H坐标系的方法的步骤是:
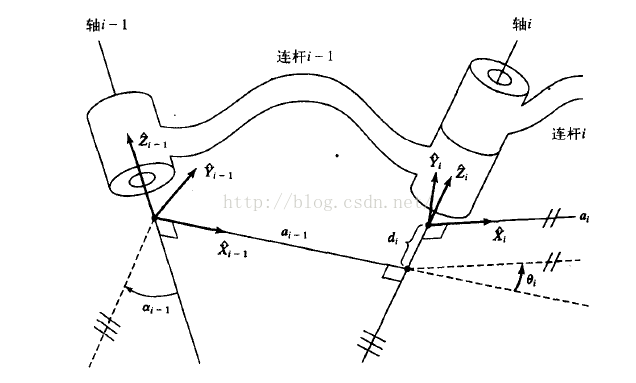
1) 画出各关节轴
2) 找出关节轴 和关节轴 的公垂线或交点,以关节轴 和关节轴 的交点或公垂线与关节轴 的交点作为坐标系 的原点。
3) 规定 轴沿关节轴 的指向。
4) 规定 轴沿公垂线由关节 指向关节 。如果关节轴 和关节轴 平行,则 轴垂直于关节轴 和关节轴 所在的平面。
5) 按照右手定则确定 的方向。
6) 当地一个关节变量为0时,规定坐标系 和 重合。对于坐标系 ,其原点和 的方向可以任意选取。但在选取时,通常尽量使连杆参数为0。
二、将连杆坐标系的原点建立在连杆的关节连杆末端。

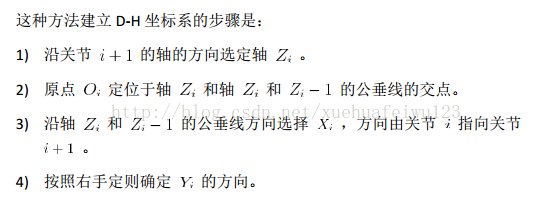
这种方法建立D-H坐标系的步骤是:
1) 沿关节 的轴的方向选定轴 。
2) 原点 定位于轴 和轴 和 的公垂线的交点。
3) 沿轴 和 的公垂线方向选择 ,方向由关节 指向关节 。
4) 按照右手定则确定 的方向。
三、齐次矩阵的比较。
两种不同的D-H矩阵建立方法对应的齐次矩阵等式不同的。
1) 第一种方法的齐次矩阵为:

2) 第二种方法的齐次矩阵为:

3) 两种方法看起来齐次变换矩阵是不一样的,但是对于同样的机器人连杆系统,如果其基座标系和末端执行器的坐标系是完全一样的,那么得到的运动学方程就是一样的。
4) 因为后期的逆运动学、雅可比矩阵等都是以运动学参数为基础,所以比较两种方法的联系和区别非常重要。仔细比较可以发现:
i. 第一种方法的坐标系 的原点和第二种方法的坐标系 的原点重合。
ii. 第一种方法的坐标系 轴和第二种方法的坐标系 轴重合。
iii. 第一种方法的坐标系 的 轴和第二种方法的坐标系 的 轴方向重合。
四、参考文献。
1) JohnJ Craig, 机器人学导论(第三版),机械工业出版社,2006.6.
2) SaeedB.Niku 等,机器人学导论——分析、系统及应用,电子工业出版社,2004.1.
3) BrunoSiciliano 等,机器人学 建模、规划与控制,西安交通大学出版社,2013.11.














 1193
1193











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









