






Stanford arm,斯坦福机械臂,也是经典的机器人模型,很多教材上都用它作为例子。

1、动力学建模
其 DH 矩阵为:
| j | theta | d | a | alpha | offset |
|---|---|---|---|---|---|
| 1 | q1 | 0.412 | 0 | -1.571 | 0 |
| 2 | q2 | 0.154 | 0 | 1.571 | 0 |
| 3 | -1.571 | q3 | 0 | 0 | 0 |
| 4 | q4 | 0 | 0 | -1.571 | 0 |
| 5 | q5 | 0 | 0 | 1.571 | 0 |
| 6 | q6 | 0.263 | 0 | 0 | 0 |
包含动力学参数的建模为:
% th d a alpha
L(1) = Link([ 0 0.412 0 -pi/2 0]);
L(2) = Link([ 0 0.154 0 pi/2 0]);
L(3) = Link([ -pi/2 0 0 0 1]); % PRISMATIC link
L(4) = Link([ 0 0 0 -pi/2 0]);
L(5) = Link([ 0 0 0 pi/2 0]);
L(6) = Link([ 0 0.263 0 0 0]);
L(3).qlim = [12 12+38] * 0.0254;
L(1).qlim = [-170 170]*pi/180;
L(2).qlim = [-170 170]*pi/180;
L(4).qlim = [-170 170]*pi/180;
L(5).qlim = [-90 90]*pi/180;
L(6).qlim = [-170 170]*pi/180;
L(1).m = 9.29;
L(2).m = 5.01;
L(3).m = 4.25;
L(4).m = 1.08;
L(5).m = 0.630;
L(6).m = 0.51;
L(1).Jm = 0.953;
L(2).Jm = 2.193;
L(3).Jm = 0.782;
L(4).Jm = 0.106;
L(5).Jm = 0.097;
L(6).Jm = 0.020;
L(1).G = 1;
L(2).G = 1;
L(3).G = 1;
L(4).G = 1;
L(5).G = 1;
L(6).G = 1;
L(1).I = [0.276 0.255 0.071 0 0 0];
L(2).I = [0.108 0.018 0.100 0 0 0];
L(3).I = [2.51 2.51 0.006 0 0 0 ];
L(4).I = [0.002 0.001 0.001 0 0 0 ];
L(5).I = [0.003 0.0004 0 0 0 0];
L(6).I = [0.013 0.013 0.0003 0 0 0];
L(1).r = [0 0.0175 -0.1105];
L(2).r = [0 -1.054 0];
L(3).r = [0 0 -6.447];
L(4).r = [0 0.092 -0.054];
L(5).r = [0 0.566 0.003];
L(6).r = [0 0 1.554];
qz = [0 0 0 0 0 0];
stanf = SerialLink(L, 'name', 'Stanford arm');模型
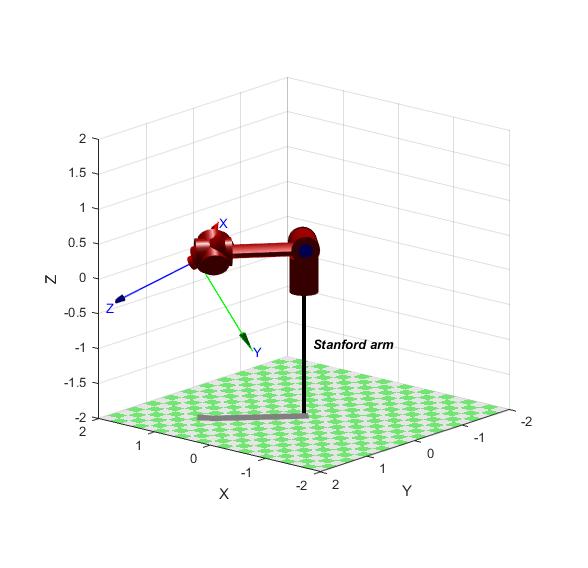
要显示模型,可以在命令行输入:
w=[-1,1,-1,1,-1,1];
stanf.plot(qz,'workspace',w);显示的结果如下图所示:

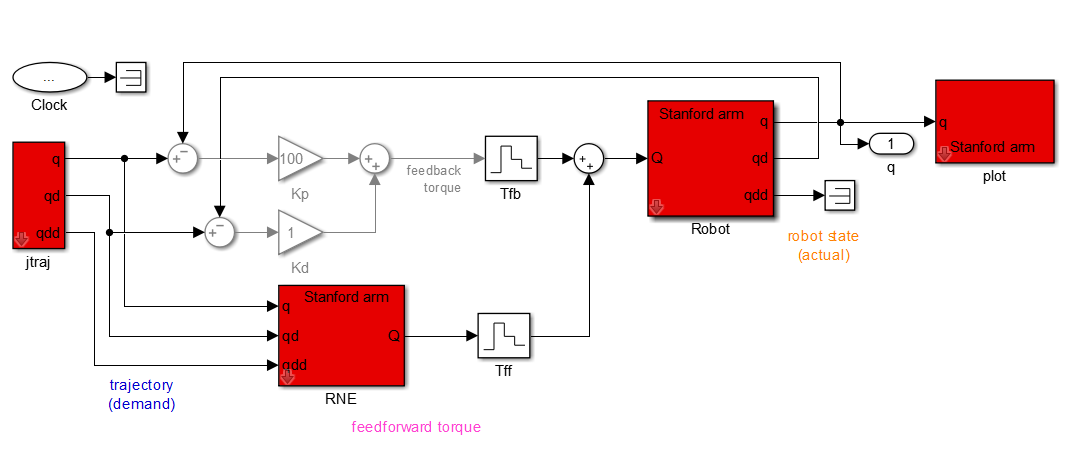
PD 控制
控制率为:
u(t)=Kp∗e+Kd∗e˙+τ
simulink 控制图为:
参考文献:
Peter Corke,Robotics Toolbox for MATLAB Release 9(Version,9.10),2015.02
P.I. Corke, Robotics, Vision & Control: Fundamental Algorithms in MATLAB.Springer, 2011.















 1111
1111

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









