







 本文介绍了真值评测系统在自动驾驶辅助系统开发中的重要作用,包括高精度传感器提供的环境信息、AI后处理算法提升的识别率和精度,以及多源信息融合的优势。详细讲述了系统的工作流程、硬件设备(如摄像头、毫米波雷达)和软件算法,特别是目标和车道线的精度算法。此外,还讨论了真值增强和系统扩展方法。
本文介绍了真值评测系统在自动驾驶辅助系统开发中的重要作用,包括高精度传感器提供的环境信息、AI后处理算法提升的识别率和精度,以及多源信息融合的优势。详细讲述了系统的工作流程、硬件设备(如摄像头、毫米波雷达)和软件算法,特别是目标和车道线的精度算法。此外,还讨论了真值增强和系统扩展方法。
1 真值系统概述
1.1 真值评测系统核心应用
快速构建有效感知真值,快速完成感知性能评估,快速分析感知性能缺陷。
主要应用场景包括:
1. 感知算法开发验证: 在算法开发周期中,评测结果可以作为测试报告的一部分,体现算法性能的提升。
2. 遴选供应商: 在供应商选择过程中,可以将各供应商的评测结果作为对比的一个维度,分析各供应商的优势。
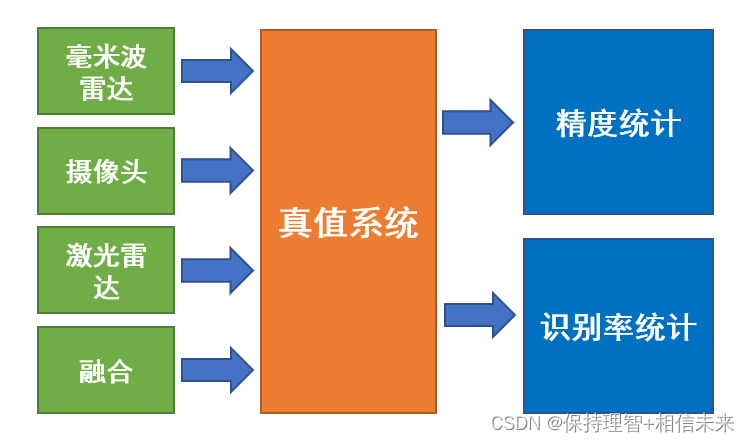
1.2 真值评测系统感知优势
真值评测系统感知方案优势:
1. 高精度传感器,提供高可靠环境信息;
2. AI离线后处理算法,提供更高识别率与精度;
3. 多源信息融合,发挥各传感器优势,提供更稳定的识别结果。
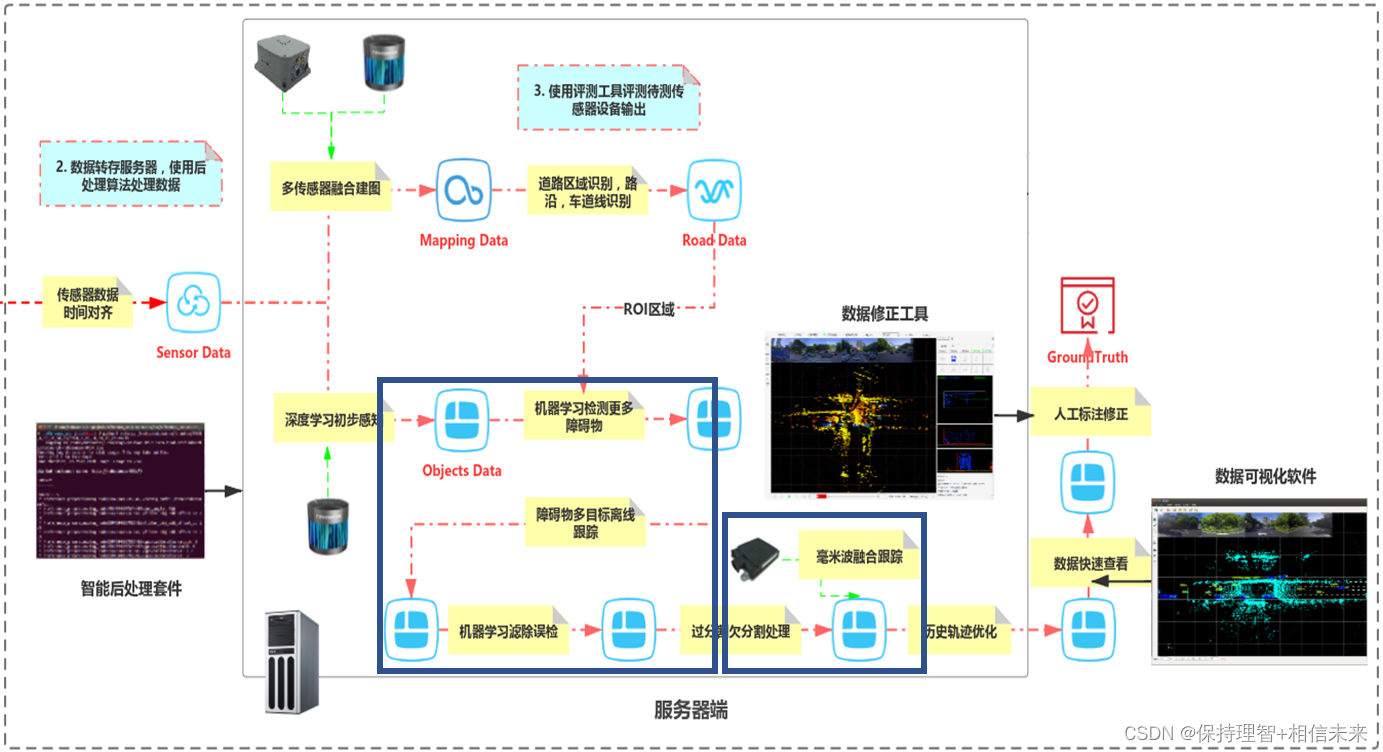
1.3 真值评测系统工作流程
实车采集各传感器数据——回灌被测传感器数据——传感器输出上传数据中心——离线生成融合真值航迹——对比被测航迹与真值航迹——对结果进行自动处理并输出报告
2 硬件
2.1 真值评测系统硬件设备描述
| 设备 | 数量 | 用途 | |
| 1 | 激光雷达 | 1 | 输出激光点云 |
| 2 | 摄像头 | 1 | 视觉感知 |
| 3 | 摄像头 | 4 | 环境信息录制 |
| 4 | 毫米波雷达 | 2 | 输出目标信息 |
| 5 | RTK惯导 | 1 | 建图,定位 |
| 6 | CAN分析仪 | 1 | CAN数据录制 |
| 7 | 工控机 | 1 | 车端传感器数据的录制,数据校验 |
| 8 | 交换机 | 1 | - |
| 9 | 安装支架 | 1 | - |
| 10 | 服务器 | 1 | 路测数据后处理,报告生成 |
2.1.1 真值评测系统车端硬件 - 摄像头
| 参数 | |
| 水平视角 | 100° |
| 垂直视角 | 35.5° |
| 像素 | 2048*1080 |
| 动态范围 | 120dB |
| 帧速率 | 30FPS |
| 光圈 | F1.8 |
| LENS材质 | 6G+IR |
| 额定功率 | 6W |
| Color Filter | RCCB |
| 探测距离 | 150m |
| 目标识别率 | 99% |
| 车道线检测率 | 95% |
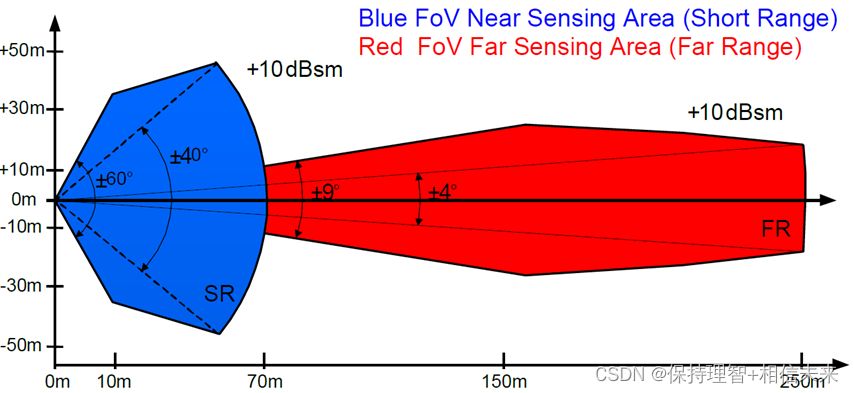
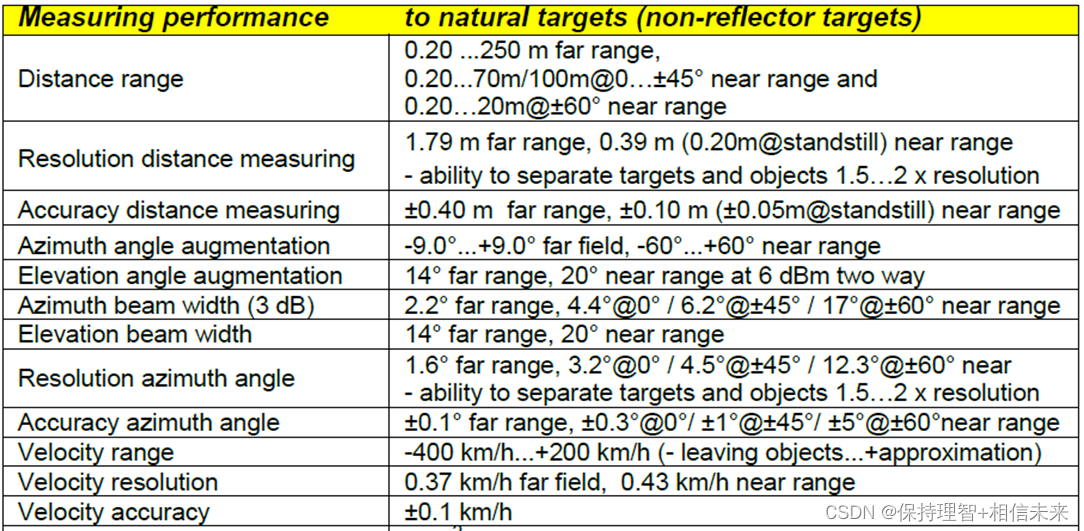
2.1.2 真值评测系统车端硬件 - 毫米波雷达
使用77GHz毫米波雷达,提供精确的目标位置与速度信息。
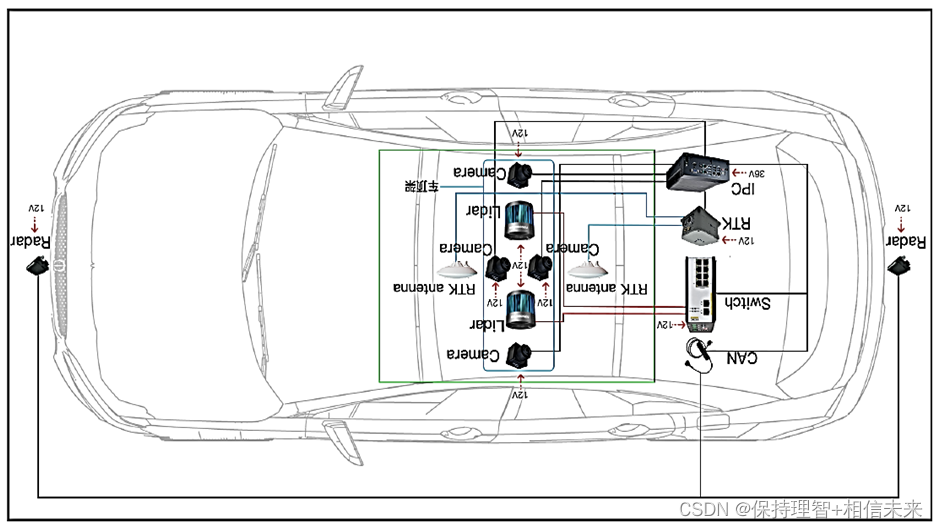
2.2 真值评测系统传感器布置
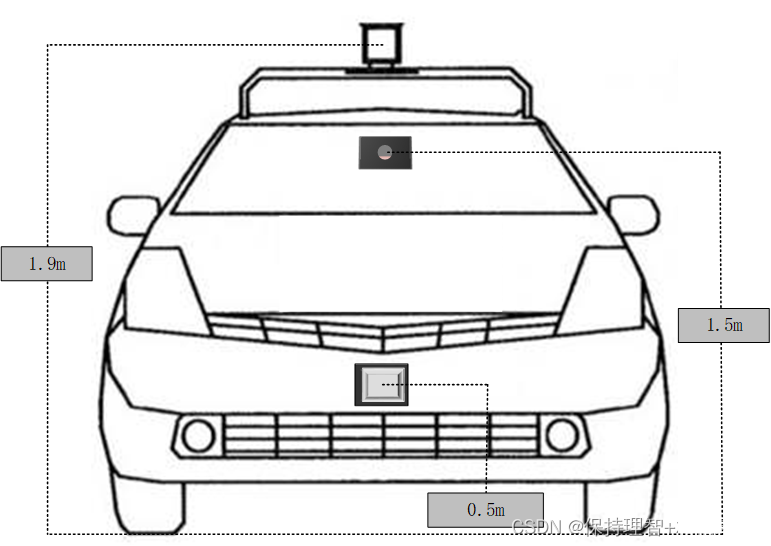
* 激光雷达位于车顶中央,推荐高度1.9m;
* 摄像头位于前挡风玻璃后,推荐高度1.5m;
* 毫米波雷达位于前保险杠,推荐高度0.5m。
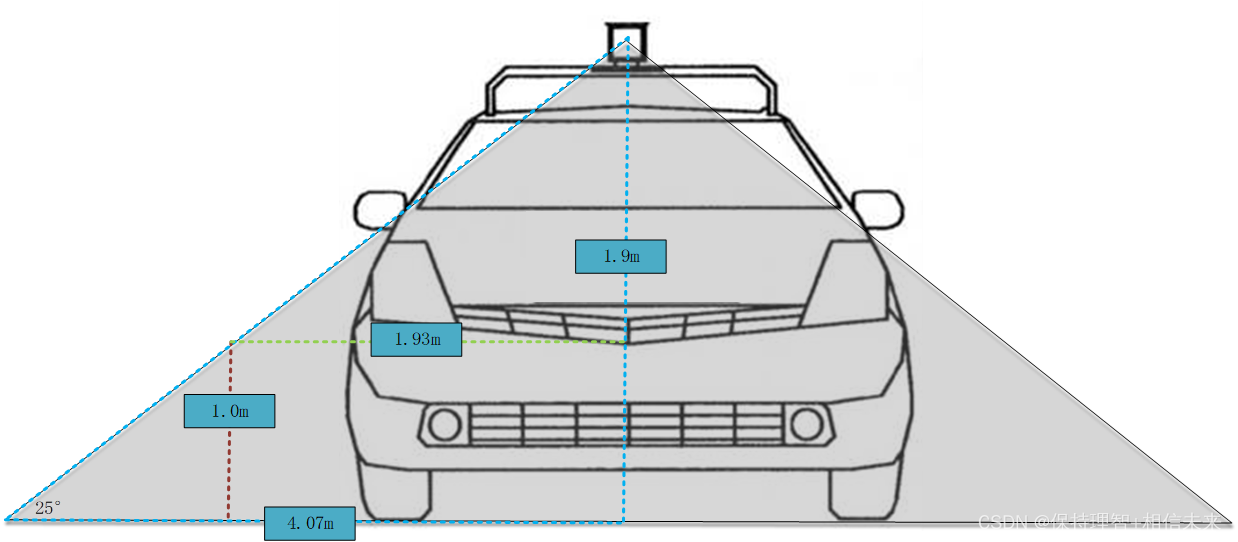
* 激光雷达垂直方向角度范围是-25°~+15°;
* 对于地面目标,其点云检测盲区约为4.07m;
* 对于1m高的目标,其点云检测盲区为1.93m。
2.3 真值评测系统服务端硬件
传感器数据存储在数据服务器或硬盘中,真值后处理软件运行在Linux主机中,用户修改配置文件后,便可一键生成评估报告。
研发中的真值系统web服务软件,使用户可以在自己的终端中,通过访问真值系统服务器,实现数据处理与报告生成。
3 软件算法
3.1 真值评测系统软件架构

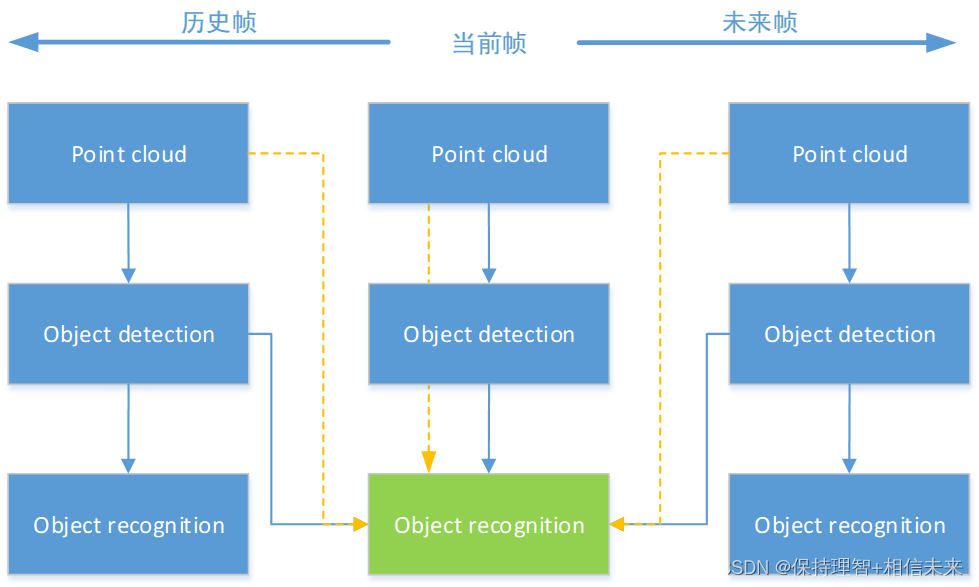
3.1.1 目标精度算法
激光雷达目标识别算法,基于深度学习识别每帧点云的目标,再结合“历史”与“未来”信息提高识别率识别精度。
融合多个传感器的感知目标结果,进行真值信息的增强计算,得到更准确的目标属性。
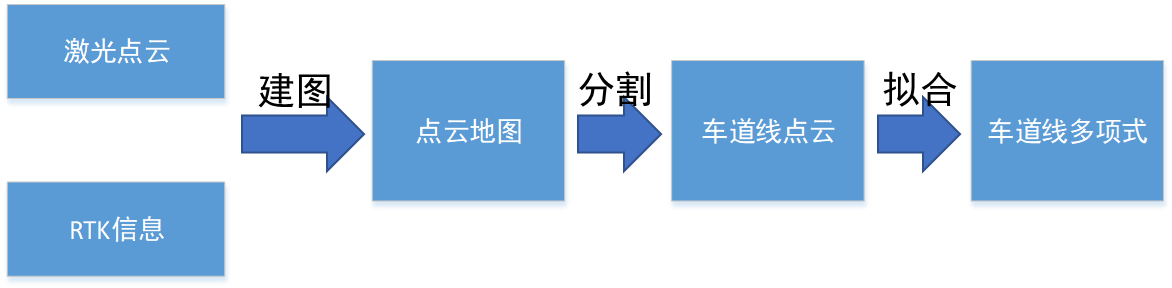
3.1.2 车道线精度算法
通过对点云数据建图,生成激光点云地图。再经过地面与车道线分割,自车位姿估计,车道线点云拟合等算法,生成车道线真值。
融合摄像头与激光雷达车道线的结果,进行真值信息的增强计算,得到更准确的车道线属性。
3.1.3 激光雷达真值感知算法
3.2 真值增强
3.2.1 真值增强的优势
通过增加摄像头和毫米波雷达产品,可以提升识别率、精度、分类等信息。
| 单激光雷达方案缺陷 | 使用1V1R(仅前视)的增强方向 | |
| 目标信息 | 会产生一定的漏识别 | 通过融合算法,补充1V1R航迹信息 |
| 无法做到准确的分类 | 基于机器视觉,可以得到详细准确的分类信息 | |
| 存在box位置估计偏差 | 基于毫米波雷达的range信息与摄像头的角度信息,提升位置精度 | |
| 车道线信息 | 会产生一定的漏识别 | 基于摄像头的车道线识别结果,补充漏识别的车道线信息 |
| 无法估计线型的分类 | 基于机器视觉,可以准确判断车道线的线型信息(虚实、单双) | |
| 无法识别颜色信息 | 基于机器视觉,可以准确提取车道线的颜色信息 |
3.2.2 目标真值增强前后性能对比
| 目标性能指标 | 仅激光雷达 |
| 输出频率 | 20HZ |
| 检测范围 | 纵向:0.5 ~ 200m 横向:±60m |
| 识别率 | 关键目标 > 98% |
| 目标类型 | Vehicle (small, big.) VRU (pedestrian, rider.) |
| 位置误差 | <6cm @0~100m <9cm @100~150m <10cm @150~200m |
| 速度误差 | <0.2m/s @0~100m <0.3m/s @100~150m <0.5m/s @150~200m |
| 目标性能指标 | 加入1V1R,真值增强处理后 |
| 输出频率 | 20HZ |
| 检测范围 | 纵向:0.5 ~ 200m 横向:±60m |
| 识别率 | 关键目标 > 99% |
| 目标类型 | Vehicle (car, truck.) VRU (pedestrian, bicycle, motorcycle.) |
| 位置误差 | <5cm @0~100m <9cm @100~150m <10cm @150~200m |
| 速度误差 | <0.2m/s @0~100m <0.3m/s @100~150m <0.5m/s @150~200m |
3.2.3 车道线真值增强前后性能对比
| 车道线性能指标 | 仅激光雷达 |
| 输出频率 | 20HZ |
| 检测范围 | 纵向距离:> 200m (camera > 80m) 车道线数量:6 最小转弯半径:< 100m |
| 识别率 | 关键车道线 > 93% |
| 车道线类型 | 激光雷达无法识别车道线类型 |
| 横向位置误差 | <3cm @0~50m <10cm @50~100m <15cm @100~200m |
| 车道线性能指标 | 加入1V1R,真值增强处理后 |
| 输出频率 | 20HZ |
| 检测范围 | 纵向距离:> 200m (camera > 80m) 车道线数量:6 最小转弯半径:< 100m |
| 识别率 | 关键车道线 > 95% |
| 车道线类型 | 线型:单实线, 单虚线, 双线(实线, 虚线, 实+虚), 白色,黄色 |
| 横向位置误差 | <3cm @0~50m <10cm @50~100m <15cm @100~200m |
3.3 真值评测系统扩展方法
加入新传感器流程:
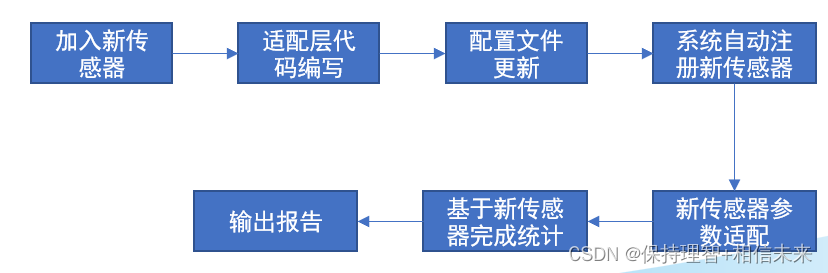
1. 在数据适配层中加入该传感器的适配代码;
2. 在配置文件中加入该传感器的描述,将其加入传感器列表;
3. 启动程序后,系统自动完成识别,无需修改顶层代码;
4. 根据新传感器特性完成参数调试,将新参数值写入配置文件;
5. 基于新传感器完成统计,输出统计结果;
6. 真值传感器与被测传感器流程一致;
7. 各传感器内部独自计算online感知,增加传感器仅增加真值服务器的offline处理时间。
4 真值信号
4.1 目标/车道线真值信号接口
| 目标信息 | 描述 |
| Timestamp | 时间戳 |
| ID | 目标的标识,具有唯一性和连续性 |
| position | 目标位置,包括x(纵向位置),y(横向位置),z(高度位置) |
| Bounding box | 目标轮廓,包括length,width,height |
| Direction | 目标航向角(rz) |
| Velocity | 目标速度,包括Vx,Vy,Vz |
| Type | 目标分类,包括car/truck/pedestrian/bicycle/motorcycle |
| 车道线信息 | 描述 |
| Timestamp | 时间戳 |
| C0 | 0次项系数,宽度 |
| C1 | 1次项系数,斜率 |
| C2 | 2次项系数,曲率 |
| C3 | 3次项系数,曲率变化率 |
| Color | 车道线颜色,包括白色,黄色 |
| Type | 车道线分类,包括单实线, 单虚线, 双线(实线, 虚线, 实+虚) |
4.2 目标标注结果接口
使用人工标注结果作为识别率统计的真值,最大程度保证统计的准确性。
| 标注信息 | 说明 |
| 分类 | Car/Truck/Bus/Van/Tricycle/Cyclist/Pedestrian |
| Dontcare | 非真实目标或者遮挡比较严重的目标 |
| 车辆姿态 | 纵向车辆 /横向车辆 /倾斜车辆 |
| 车身轮廓 | 8个点(3D框)或4个点(2D框)的像素值 |
| 遮挡比 | 以%表示目标遮挡程度 |
4.3 传感器数据量
| 传感器 | 数量 | 每小时数据量 |
| 激光雷达 | 1 | 6.7G |
| 毫米波雷达 | 2 | 0.66G*2 |
| 摄像头 | 5 | 648G(非压缩) 5G(压缩)*5 |
| RTK | 1 | 0.39G |
| 汇总 | 4 | 33.41G |
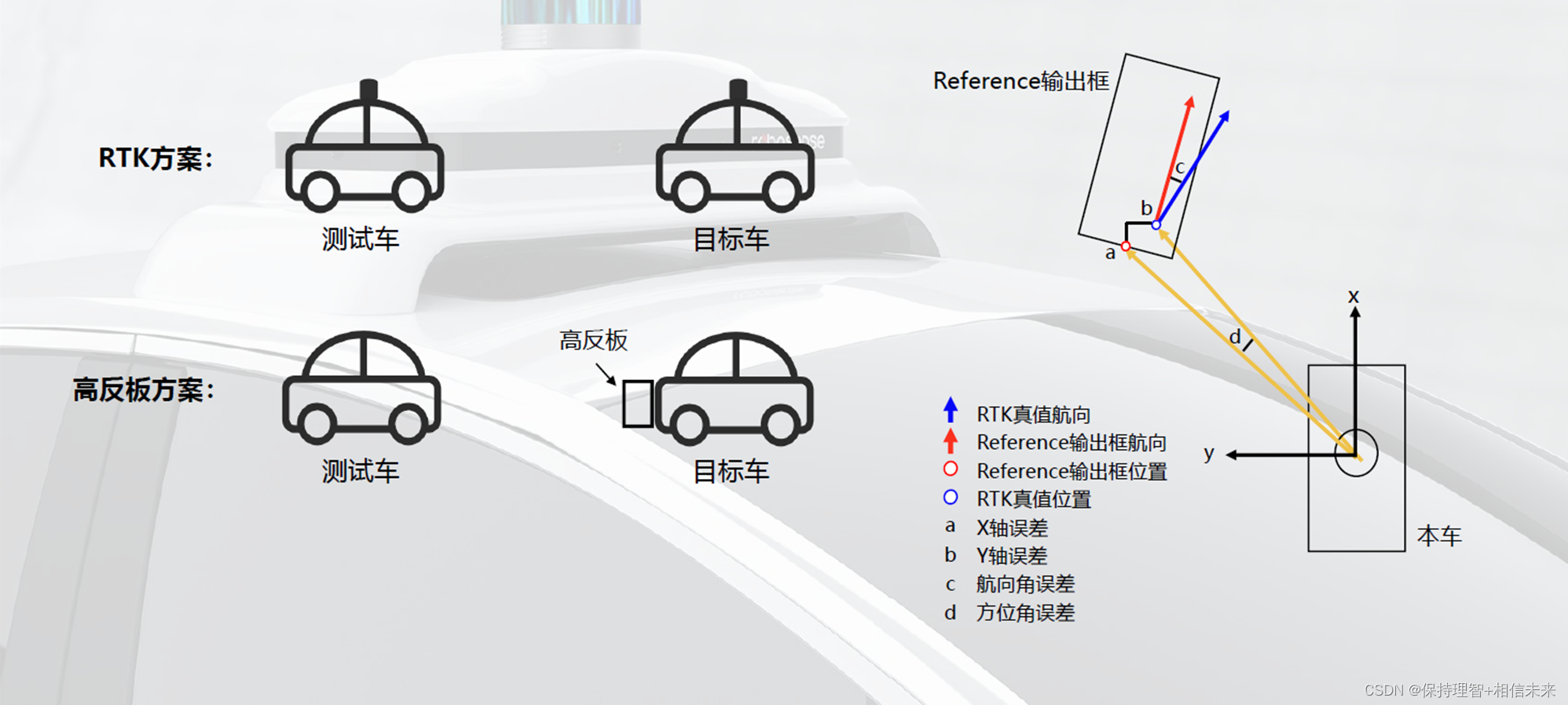
4.4 真值性能验证方案


















 913
913

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









