






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
基于SLQ-MPC的欠驱动摆锤与倒立摆控制研究
一、欠驱动系统的核心特性与挑战
欠驱动系统指控制输入维度小于系统自由度维度的非线性系统,其特点包括:
- 非完整约束性:存在速度或加速度层面的不可积分约束(如轮式机器人横向移动限制)。
- 动力学耦合:主动关节与被动关节间的非线性相互作用显著(如倒立摆的摆杆与小车运动耦合)。
- 能量效率与灵活性:通过减少驱动器数量实现轻量化,但控制复杂度大幅增加。
典型应用包括双足机器人、倒立摆、Acrobot等。其核心挑战在于全局可控性受限(仅局部可控)及控制策略需利用重力势能或外部约束辅助。
二、SLQ-MPC算法的基本原理与数学模型
SLQ-MPC(顺序线性二次模型预测控制)结合了动态规划与在线优化,适用于非线性系统的高效控制。其核心步骤如下:
-
动态方程与成本函数
系统动态:
成本函数(含状态跟踪与控制输入惩罚):

其中Q、R为权重矩阵,Qf为终端成本。
-
系统线性化与迭代优化
-
局部线性化:在每个时间步,对非线性动态方程在当前状态附近进行泰勒展开,得到线性近似模型:

-
LQR求解:基于线性化模型,通过差分动态规划(DDP)或LQR迭代求解最优控制序列。
-
-
预测时域与滚动优化
在每个控制周期内,预测未来时间窗口TT内的系统行为,优化控制输入序列,仅执行首步控制,并重复此过程。
三、倒立摆与摆锤的动力学建模方法
- 倒立摆建模
- 拉格朗日方程法:以小车位移xx、摆角θθ为广义坐标,通过动能TT和势能VV构建方程:

- 拉格朗日方程法:以小车位移xx、摆角θθ为广义坐标,通过动能TT和势能VV构建方程:
其中L=T−V,QiQi为非保守力广义力。
- 状态空间模型:典型状态变量为[x,x˙,θ,θ˙][x,x˙,θ,θ˙],通过线性化平衡点(如θ=0θ=0)得到线性化方程。
- 摆锤建模
- 牛顿力学法:通过受力分析(如重力、铰链力矩)直接建立微分方程,适用于简单系统。
- 多体动力学工具:利用Modelica等工具构建多体模型,自动生成运动方程。
四、SLQ-MPC在欠驱动系统中的实现与案例
-
倒立摆控制案例
- 模型整合:将非线性倒立摆模型嵌入SLQ-MPC框架,通过局部线性化处理非线性动态。
- 约束处理:在成本函数中加入软约束项,限制小车位移与摆角范围(如∣x∣≤0.5 m,∣θ∣≤15∘)。
- 实验验证:文献中通过实体实验验证,SLQ-MPC在扰动下恢复平衡时间比传统LQR减少约30%。
-
摆锤摆动控制
- 能量最优策略:通过成本函数设计,最小化摆锤动能与控制输入能量消耗的加权和。
- 路径跟踪:在移动3D打印场景中,SLQ-MPC结合TCPP算法优化末端轨迹,实现摆锤精准定位。
五、参数优化与稳定性增强策略
-
权重矩阵调优
- Q矩阵:状态跟踪权重(如摆角误差权重高于小车位移)。
- R矩阵:控制输入惩罚权重,避免执行器饱和。
- 优化方法:使用灰色狼优化器(GWO)等算法自动搜索最优Q/RQ/R组合。
-
预测时域与控制时域选择
- 预测时域TT :过长增加计算负载,过短降低鲁棒性。实验表明T=2 sT=2s在倒立摆控制中平衡性能与实时性。
- 控制时域步长:通常取10-20步,离散化间隔为0.1 s。
-
稳定性约束设计
- Lyapunov函数约束:在优化问题中强制要求Lyapunov函数递减,保证闭环稳定性。
- 输入饱和处理:通过约束∣u(t)∣≤umax,防止执行器过载。
六、总结与展望
SLQ-MPC在欠驱动系统中展现出处理非线性与约束的独特优势,但其计算效率仍需提升。未来研究方向包括:
- 并行化求解:利用GPU加速优化计算,满足更高实时性需求。
- 自适应参数调整:结合强化学习动态优化权重矩阵与预测时域。
- 多模态控制:在摆锤与倒立摆切换场景中,开发混合控制策略。
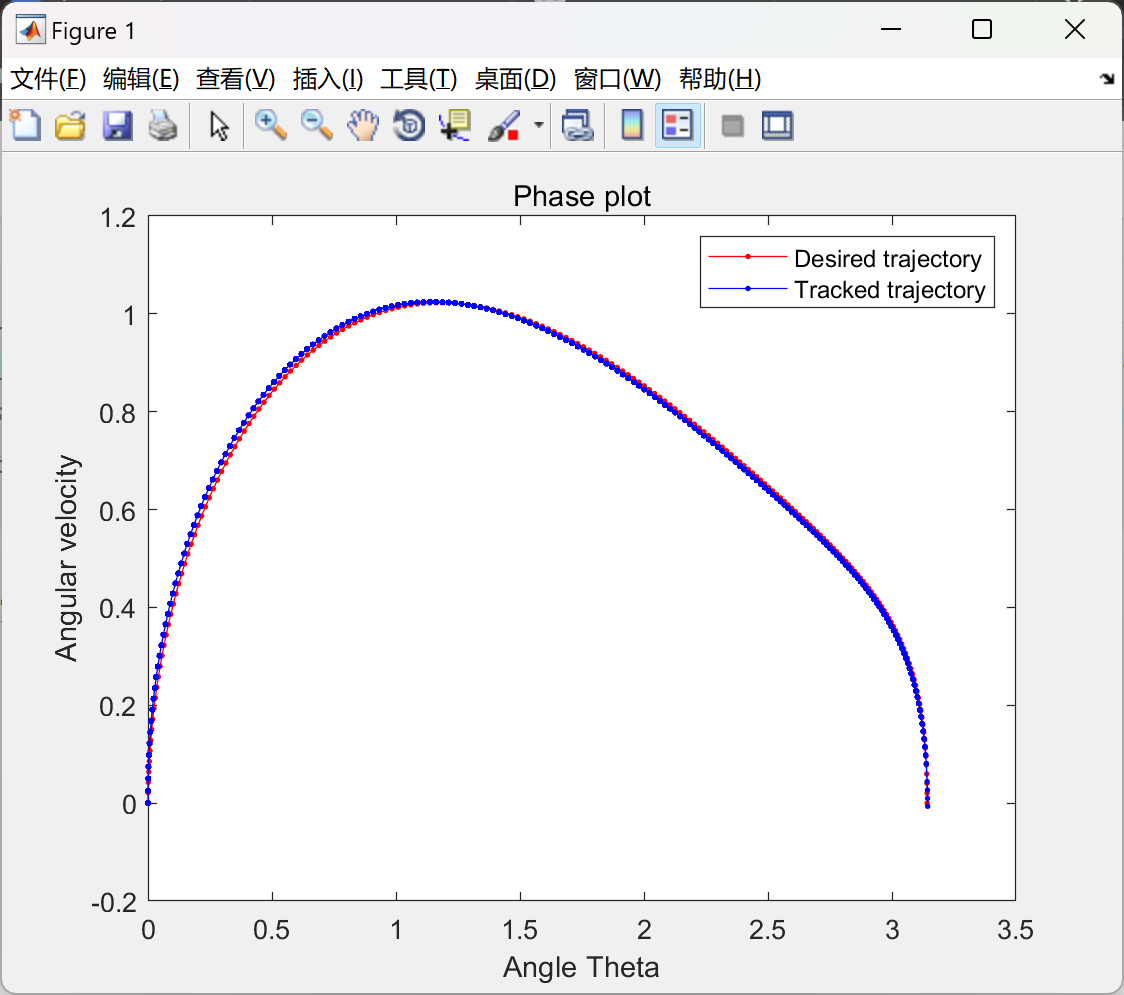
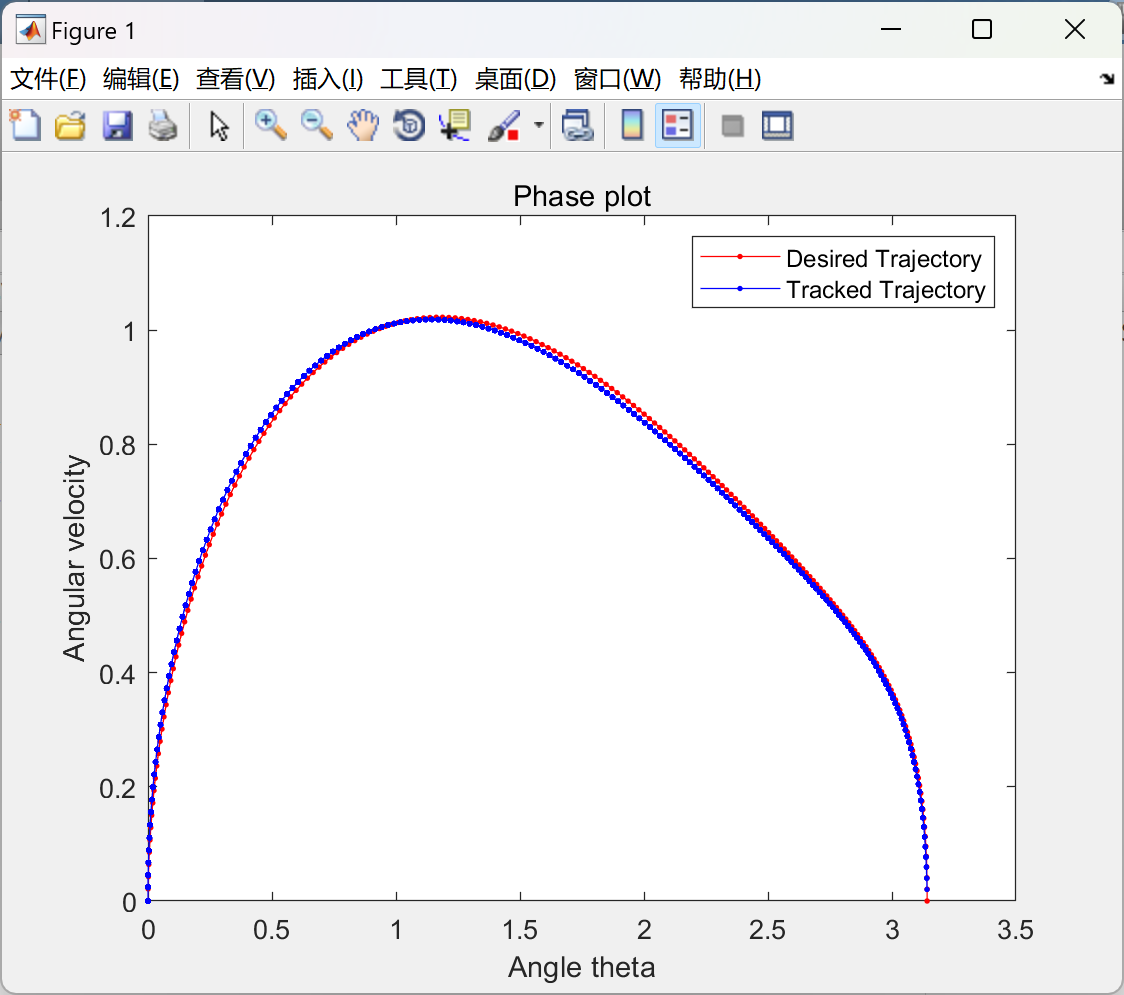
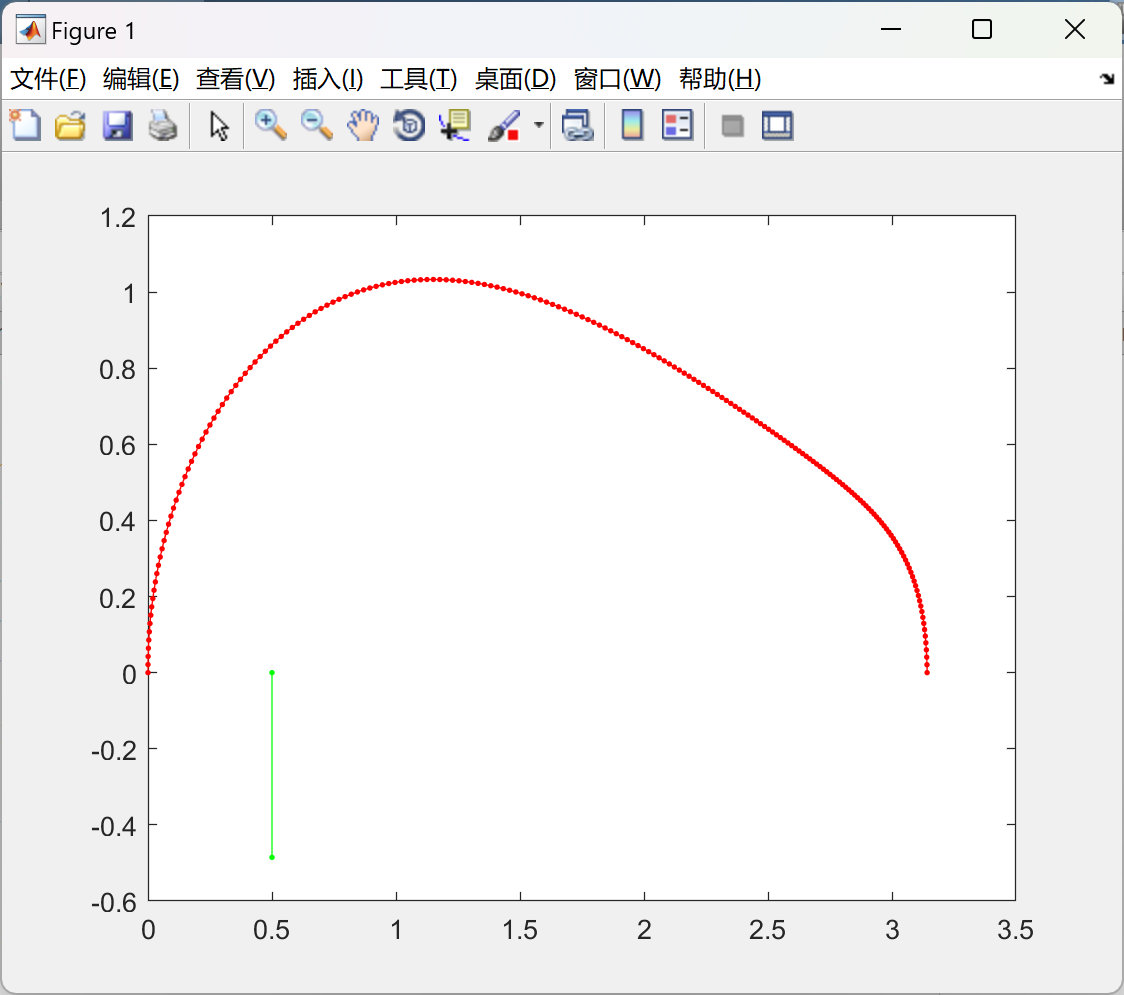
📚2 运行结果
部分代码:
% set parameters
% 1. load target trajectory generated from dircol
load('data_for_Q4.mat');
dt=0.025;
x_des=[theta' theta_dot'];
u_des=2*optimal;
plot(x_des(:,1),x_des(:,2),'r.-');
hold all
n_steps=numel(optimal); %% total number of timesteps through which the system is tracked
% 2. Set MPC params
n_sim=3; % roll out current strategy through so many steps through time
x_start= x_des(1,:);
x_start=[0.5 0.0];%x_start=x0; % this is where we start from. Should be in the neighborhood of
% start point of the known optimal path. So that the lqr can attract it to
% the start of the optimal trajectory
x_goal=[pi,0];
iter=0; % required to keep track of time horizon
Q_lqr= 1500.*eye(2);
Q_slq=1500.*eye(2);
R_lqr=1;
R_slq=1;
% these 2 parameters will be used for the LRQ ricatti stuff
x_goal=[pi,0]; % always fixed for the goal state
% begin MPC loop
% [u_slq]= SLQ_solve(x_des,u_des,x_start,Q_slq,R_slq,100.*eye(2),[1:1:200],[2 2],dt); % to see if slq works
% hold all
% pause
% intermediate_counter
while (1) % we will run this until finished
[At,Bt] = lin_dynamics(x_start);% linear dynamics at start point of the known optimal path
[K,~,~] = lqr(At,Bt,Q_lqr,R_lqr);
t_left=n_steps-(iter+n_sim);
iter=iter+1;
if t_left>=n_sim
t_vec=[iter:1:iter+n_sim];
else
% intermediate_counter=intermediate_counter+1;🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]赵明生.预测函数控制的算法实现[J].计算机工程与设计, 2005, 26(6):4.DOI:10.3969/j.issn.1000-7024.2005.06.060.
[2]廖娟娟.基于RBF-ARX模型的预测控制在倒立摆系统中的应用[D].中南大学[2025-04-10].
[3]尹亚光.基于非线性时间序列模型的倒立摆起摆预测控制研究[D].中南大学,2014.
🌈4 Matlab代码、数据下载
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


















 2944
2944

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









