






DeepSeek-V3 横空出世,训练和推理成本极低,一个重要的原因就是采用了 FP8 进行训练和推理,今天结合最近的实践来分析一下其中的原理:
Group/Block wise 量化
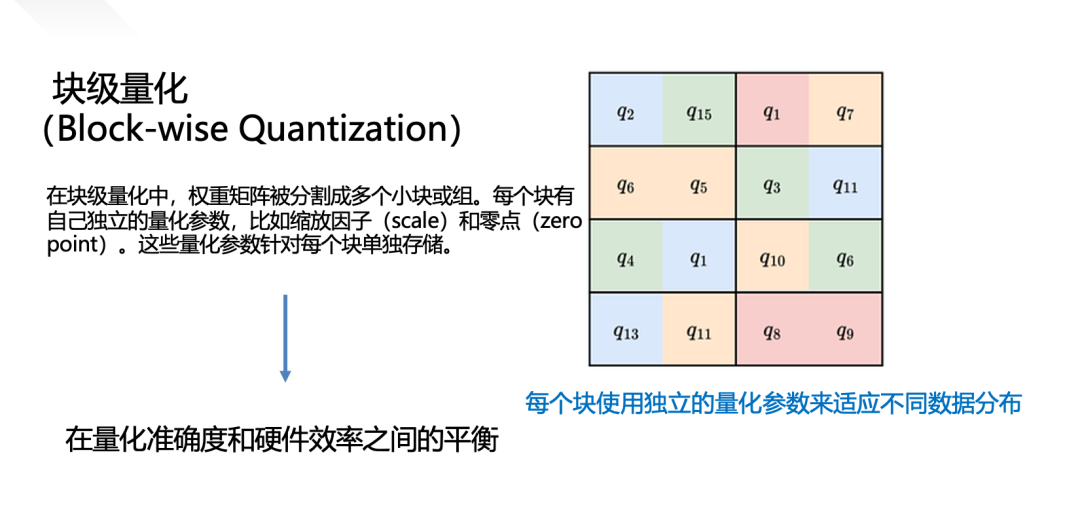
分块量化(Block-wise Quantization),也称为分组量化(Per-group Quantization),是一种细粒度量化方法。
特征异常值是指在特征分布中远离大部分数据的极端值。这些异常值对量化尤其具有挑战性,因为如果使用全局的量化参数(例如最大值),则这些异常值可能会导致大部分数据的量化精度下降。
细粒度量化的核心思想是使用更精细的量化粒度,即对输入和权重的不同部分使用不同的缩放因子。这样可以更好地适应数据的局部特征,减少异常值的影响。
分块量化
分块量化将张量分割成更小的块或组,并为每个块分配独立的量化参数(缩放因子 s 和零点 z)。
如上图所示,矩阵被分割成多个小块,每个小块使用不同的颜色进行标注,对应不同的量化参数。
-
优点:提供了对量化过程更精细的控制,通常会在模型精度和计算效率方面带来更好的性能。通过调整块的大小,可以在精度和效率之间进行灵活的权衡。相比逐张量量化,分块量化能够更好地适应张量内部数据分布的变化,减少量化误差;相比逐通道量化,分块量化可以减少需要存储的量化参数数量,从而降低存储开销。
-
缺点:需要合理划分组别,增加了量化策略的设计复杂性,而且分块量化一般对硬件不友好,计算效率低。
总之 Block-wise 量化是对矩阵分组,每一组有独立的量化参数,可以更好的控制精度损失。
DeepSeek-V3 量化配置
首先看 DeepSeek-V3 FP8 版本的模型配置:
"quantization_config": {
"activation_scheme": "dynamic",
"fmt": "e4m3",
"quant_method": "fp8",
"weight_block_size": [
128,
128
]
}
量化精度:FP8
量化粒度:
-
权重:block-wise 量化, 每个 block 的 shape 是[128,128], 静态离线量化
-
激活:per-token-group 量化, 动态在线量化
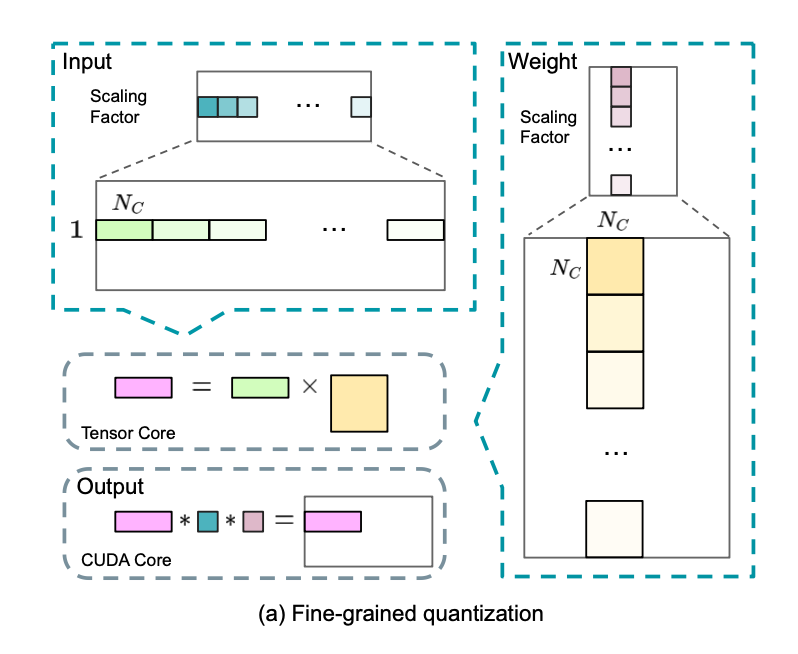
细粒度量化(dsv3-report)
(1) 对于激活值,我们以 1x128 的 组 为基础对元素进行分组和缩放(每个 token 每 128 个通道);
(2) 对于权重,我们以 128x128 的 块 为基础对元素进行分组和缩放(每 128 个输入通道每 128 个输出通道)。
结合上图我们来看下如何对权重和激活值进行量化。
权重量化(block-wise)
假设权重 B 的shape为: [hidden_dim, out_dim]
1.分块方式:
-
在
hidden_dim维度上每 128 个输入特征一组 -
在
out_dim维度上每 128 个输出特征一组
2.量化缩放因子(scales):
-
Bs 的shape:
[hidden_dim//128, out_dim//128] -
每个权重块使用独立的 scale
-
静态量化:权重量化是离线预计算好的
激活量化(per-token-group)
假设激活A输入的shape为: [batch_size x seq_len, hidden_dim]
1.分块方式:
- 对于每一个 token,在
hidden_dim维度上每 128 个通道的激活值分为一组,并为这一组计算一个单独的缩放因子。
2.量化缩放因子:
-
As 的 shape:
[batch_size x seq_len, hidden_dim//128]每个块使用独立的 scale 进行量化
-
动态量化:在推理过程中,实时对激活进行量化
-
不对 token 维度分块
FP8-GEMM 工程实现
下面主要针对 FP8 GEMM 的工程实现讨论。
理解了上面的权重和激活量化原理,那么下面来看如何进行两个FP8量化矩阵的乘法运算。
经过量化,我们得到了下面参数:
// inputs // A [M, K] fp8 (按行分组量化,每组对应一个 As 元素) // B [N, K] fp8 (按块量化,块大小为 [block_k, block_n],每个块对应一个 Bs 元素) // As [M, K/block_k] fp32 (A 的每行(或每组)的量化比例因子) // Bs [K/block_k, N/block_n] fp32 (B 的每个块的量化比例因子) // outputs // mat [M, N] fp32
下面来看一下 DeepSeek-V3 报告里对 FP8-GEMM 的 CUDA 层面计算流程的解释:
GPU计算流程
背景:
- 下溢和精度损失: 使用 FP8 等低精度格式进行 GEMM 运算时,中间结果的累加容易出现下溢,导致精度损失。传统的做法是使用 FP32 进行累加,以保持精度。
下溢指的是计算结果的绝对值非常小,小于浮点数所能表示的最小正数(非零)。换句话说,计算结果太接近于零,以至于计算机无法用当前的浮点数格式精确地表示它,通常会被近似为零。
DeepSeek-V3 的方案:
所有FP8张量都采用E4M3格式(4位指数和3位尾数),以获得更高的精度.
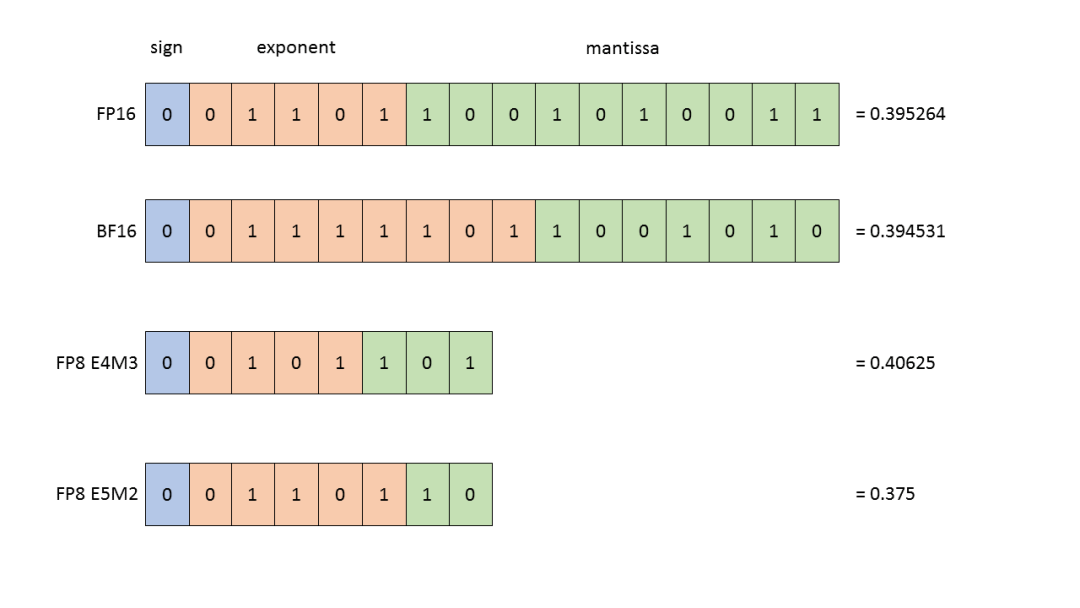
FP8表示
计算过程:
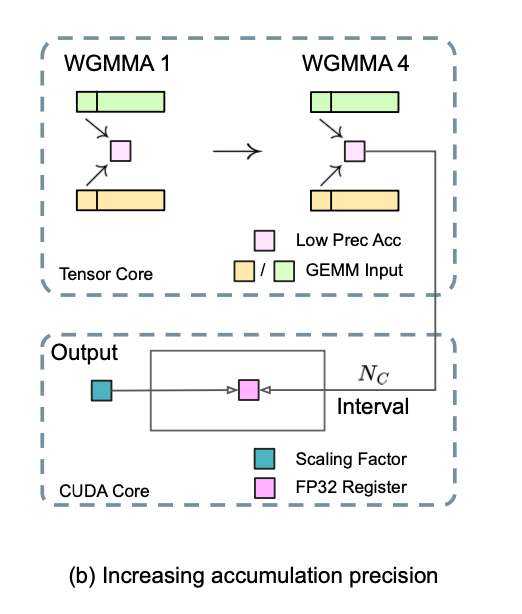
以 𝑁𝐶 = 128 个元素 MMA 的间隔转移到 CUDA Cores 进行高精度累加。
计算流程
每当 Tensor Core 累加了 128 个 FP8 结果后,就会将这些结果转换(或缩放)到 FP32 精度,然后在 CUDA Cores 的 FP32 寄存器中进行累加。
计算流程:
-
Tensor Core 以 FP8 精度高效地执行大量的矩阵乘法和累加(MMA)操作。使用低精度累加器存储中间结果
-
每累加 128 个元素(Nc = 128),就将这些 FP8 累加结果转换到 FP32 精度。
-
在 CUDA Cores 的 FP32 寄存器中进行高精度的累加,最终结果经过Scaling Factor缩放,也就是反量化。
-
重复步骤 1-3,直到完成所有的矩阵乘法和累加操作。
Python native实现
核心代码:
`def native_w8a8_block_fp8_matmul(A, B, As, Bs, block_size, output_dtype=torch.float16): """This function performs matrix multiplication with block-wise quantization using native torch. It takes two input tensors `A` and `B` with scales `As` and `Bs`. The output is returned in the specified `output_dtype`. """ n_tiles = (N + block_n - 1) // block_n k_tiles = (K + block_k - 1) // block_k assert n_tiles == Bs.shape[0] assert k_tiles == Bs.shape[1] C_shape = (M, N) C = torch.zeros(C_shape, dtype=torch.float32, device=A.device) A_tiles = [A[:, i * block_k : min((i + 1) * block_k, K)] for i in range(k_tiles)] B_tiles = [ [ B[ j * block_n : min((j + 1) * block_n, N), i * block_k : min((i + 1) * block_k, K), ] for i in range(k_tiles) ] for j in range(n_tiles) ] C_tiles = [C[:, j * block_n : min((j + 1) * block_n, N)] for j in range(n_tiles)] As_tiles = [As[:, i : i + 1] for i in range(k_tiles)] for i in range(k_tiles): for j in range(n_tiles): a = A_tiles[i] # [M, 128] b = B_tiles[j][i]. #[128, 128] c = C_tiles[j] # [M, 128] s = As_tiles[i] * Bs[j][i] #[M, 1] c[:, :] += torch.matmul(a, b.t()) * s C = C.reshape(origin_C_shape).to(output_dtype) `
可以结合上面对矩阵乘法的注释来理解分块矩阵乘法的过程:
进行矩阵乘法的时候,先对矩阵 A 和 B 依照各自的量化粒度分块,在分块的粒度上进行矩阵乘法运算,然后再乘以量化因子进行反量化,得到分块的FP32浮点结果。
Trition 实现
代码参考 sglang 中的实现:
1.函数接口:
`def w8a8_block_fp8_matmul( A: torch.Tensor, B: torch.Tensor, As: torch.Tensor, Bs: torch.Tensor, block_size: List[int], output_dtype: torch.dtype = torch.float16, ) -> torch.Tensor: """This function performs matrix multiplication with block-wise quantization. It takes two input tensors `A` and `B` with scales `As` and `Bs`. The output is returned in the specified `output_dtype`. Args: A: The input tensor, e.g., activation. B: The input tensor, e.g., weight. As: The per-token-group quantization scale for `A`. Bs: The per-block quantization scale for `B`. block_size: The block size for per-block quantization. It should be 2-dim, e.g., [128, 128]. output_dytpe: The dtype of the returned tensor. Returns: torch.Tensor: The result of matmul. """ `
2.Triton 算子配置
`# 尝试加载之前通过 tuning 方式获得的最佳配置信息。 configs = get_w8a8_block_fp8_configs(N, K, block_size[0], block_size[1]) if configs: # If an optimal configuration map has been found, look up the # optimal config config = configs[min(configs.keys(), key=lambda x: abs(x - M))] else: # Default config # Block-wise quant: BLOCK_SIZE_K must be divisable by block_size[1] config = { "BLOCK_SIZE_M": 64, "BLOCK_SIZE_N": block_size[0], "BLOCK_SIZE_K": block_size[1], "GROUP_SIZE_M": 32, "num_warps": 4, "num_stages": 3, }`
可以通过对 Triton 算子进行 tuning 来得到最优的 kernel 配置,接着调用 Triton 算子。
3.Triton算子实现
我觉得Triton 的代码介于 PyTorch 和 CUDA 代码之间,它提供了一种比手写 CUDA 算子更高层次的抽象,方便开发。
核心计算流程如下,注意累加器 accumulator 是 float32 精度的。
@triton.jit def _w8a8_block_fp8_matmul( # Pointers to inputs and output ): accumulator = tl.zeros((BLOCK_SIZE_M, BLOCK_SIZE_N), dtype=tl.float32) for k in range(0, tl.cdiv(K, BLOCK_SIZE_K)): a = tl.load(a_ptrs, mask=offs_k[None, :] < K - k * BLOCK_SIZE_K, other=0.0) b = tl.load(b_ptrs, mask=offs_k[:, None] < K - k * BLOCK_SIZE_K, other=0.0) k_start = k * BLOCK_SIZE_K offs_ks = k_start // group_k a_s = tl.load(As_ptrs + offs_ks * stride_As_k) b_s = tl.load(Bs_ptrs + offs_ks * stride_Bs_k) accumulator += tl.dot(a, b) * a_s[:, None] * b_s[None, :] a_ptrs += BLOCK_SIZE_K * stride_ak b_ptrs += BLOCK_SIZE_K * stride_bk
Cutlass 实现
先了解一下几种量化缩放的术语(和量化粒度有关):
-
张量级缩放(Tensor-wise Scaling): 每个张量使用单个缩放因子,在尾声(epilogue)中应用。
-
行级缩放(Row-wise Scaling): 使用一个行向量进行缩放,对于操作数 A 的维度为 Mx1,对于操作数 B 的维度为 1xN,避免沿归约维度进行缩放。这也可以在尾声中使用 EpilogueVisitorTree 来处理。
-
分块缩放(Block-wise Scaling): 引入一个 2D 缩放张量,每个 CTA 块分配一个缩放值。由于此缩放涉及归约维度 (M, N, K),因此必须在主循环中应用,这会影响性能。
-
分组缩放(Group-wise Scaling): 使用一个 2D 缩放张量,每个 CTA 块有多个缩放值。缩放粒度独立于 CTA 块配置,为将来的实现提供了更大的灵活性。
关于 FP8-block-wise 量化有先后两个 PR,第一个 PR 先支持了Blockwise Scaling ,第二个 PR 在第一个的基础上支持了 Groupwise Scaling,下面依次介绍。
分块缩放
第一个PR[1] 实现了 CUTLASS F8 GEMM 的分块缩放(Blockwise Scaling),,通过共享内存暂存缩放张量,并为将来支持分组缩放做准备。
分块缩放
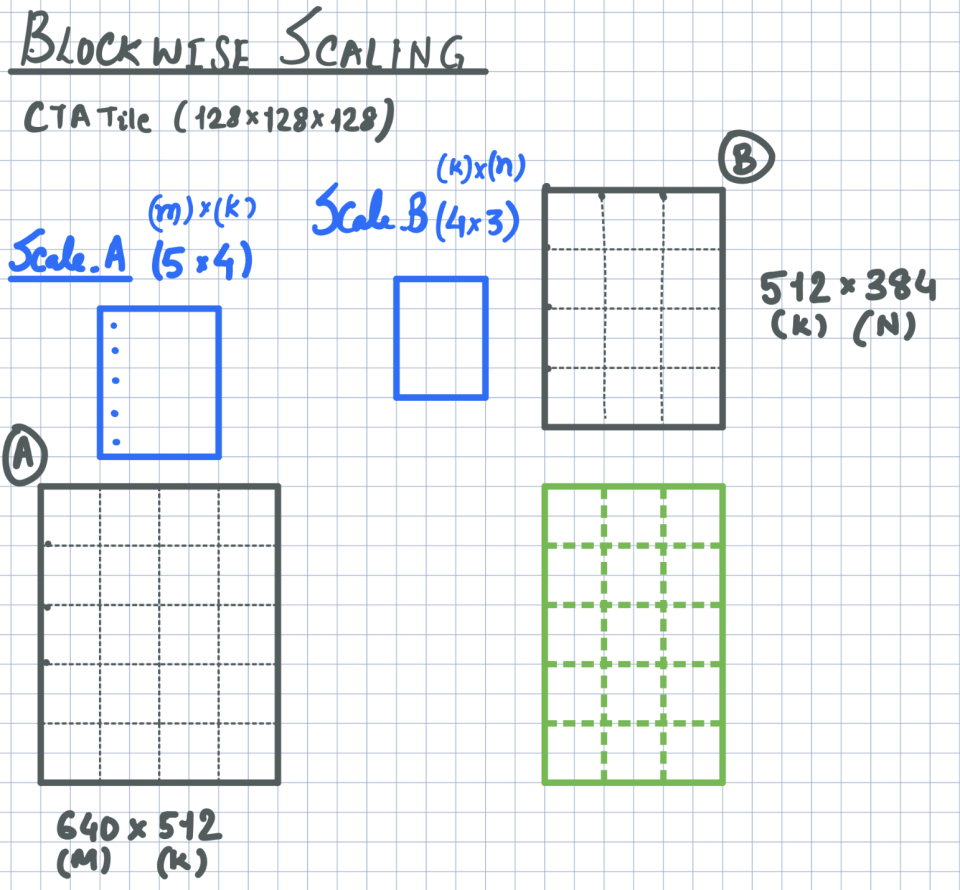
上面这张图表示了分块缩放:
-
CTA Tile (128x128x128): 这表示一个 CUDA 线程块(CTA)处理的数据块的大小。在这个例子中,每个 CTA 处理一个 128x128 的输出块,其中 K 维度(归约维度)的大小也是 128。这个128x128x128是逻辑上的,实际的计算可能根据warp size进一步划分。
-
A (640x512): 输入矩阵 A 的维度是 640x512 (M x K)。
-
B (512x384): 输入矩阵 B 的维度是 512x384 (K x N)。
-
Scale A (5x4): A 的缩放因子矩阵,维度是 5x4。这里的 5 对应 M 维度被划分成的块数(640 / 128 = 5,向上取整),4 对应 K 维度被划分成的块数(512 / 128 = 4)。每个元素对应 A 的一个 128x128 的块的缩放因子。
-
Scale B (4x3): B 的缩放因子矩阵,维度是 4x3。这里的 4 对应 K 维度被划分成的块数(512 / 128 = 4),3 对应 N 维度被划分成的块数(384 / 128 = 3)。每个元素对应 B 的一个 128x128 的块的缩放因子。
-
输出矩阵C (绿色部分): 输出矩阵 C 的维度是 640x384 (M x N)。它被划分成若干个 128x128 的块,每个块由一个 CTA 计算
分组缩放
第二个PR[2] 在第一个 PR(添加了分块缩放策略)的基础上,进一步添加了针对 A 张量 M 维度的分组缩放策略。
沿 M 维度的缩放粒度与 CTA 块配置无关,但是,沿 N 和 K 维度的缩放粒度仍然是分块的(即每个 CTA 块一个缩放值)。
所以到了这一步,基于这个 PR 我们才能实现与前面 Pytorch 和 Triton代码功能相同的 kernel。
作者具体使用了 CUTLASS 3.0 新 API 在 Hopper 架构上进行分组缩放 FP8 GEMM 运算。
-
NVIDIA Hopper 架构引入了新的 tensor core 指令集 (GMMA),比 Ampere 的 tensor core 指令更高效。
-
Hopper 架构包含新的 Tensor Memory Accelerator (TMA) 单元,可以在全局内存和共享内存之间高效地传输大型数据块。TMA 还支持线程块之间异步拷贝。
-
使用了 Warp Specialized 内核设计
CUTLASS 中 FP8 E4M3 使用cutlass::float_e4m3_t来表示,代码比较长,在这里不详细分析了。
作者在 PR 里给的 example 只是告诉了如何使用这个GEMM,基于特定场景还需要做定制化开发优化。
如果要基于 CUTLASS 3.0 开发kernel,有两个利器可以使用:
-
CuTe :大大简化了 CUTLASS 中复杂数据布局和线程组织的管理
-
EVT:用于在 GEMM 的尾声阶段融合各种后处理操作的框架,以提高性能和效率。参考论文:EVT: Accelerating Deep Learning Training with Epilogue Visitor Tree
本文介绍了 FP8 block wise 量化的原理以及推理的工程实现,很多时候想到一个好的量化算法并不难,难的是和硬件特性结合起来,在保持精度的前提下发挥量化的最大性能。
DeepSeek-v3这类 MOE 模型在推理中,有需要用到 Grouped-GEMM 的场景,后面有时间分析下这一块。
随着大模型应用日渐普遍,大模型的训练和推理工程基础建设如火如荼,也涌出了很多AI Infra创业公司。
AI Infra 会是大模型时代的 CURD 吗?
无论如何AI Infra都会在大模型这波浪潮中扮演重要的角色。

如何学习AI大模型?
我在一线互联网企业工作十余年里,指导过不少同行后辈。帮助很多人得到了学习和成长。
我意识到有很多经验和知识值得分享给大家,也可以通过我们的能力和经验解答大家在人工智能学习中的很多困惑,所以在工作繁忙的情况下还是坚持各种整理和分享。但苦于知识传播途径有限,很多互联网行业朋友无法获得正确的资料得到学习提升,故此将并将重要的AI大模型资料包括AI大模型入门学习思维导图、精品AI大模型学习书籍手册、视频教程、实战学习等录播视频免费分享出来。

第一阶段: 从大模型系统设计入手,讲解大模型的主要方法;
第二阶段: 在通过大模型提示词工程从Prompts角度入手更好发挥模型的作用;
第三阶段: 大模型平台应用开发借助阿里云PAI平台构建电商领域虚拟试衣系统;
第四阶段: 大模型知识库应用开发以LangChain框架为例,构建物流行业咨询智能问答系统;
第五阶段: 大模型微调开发借助以大健康、新零售、新媒体领域构建适合当前领域大模型;
第六阶段: 以SD多模态大模型为主,搭建了文生图小程序案例;
第七阶段: 以大模型平台应用与开发为主,通过星火大模型,文心大模型等成熟大模型构建大模型行业应用。

👉学会后的收获:👈
• 基于大模型全栈工程实现(前端、后端、产品经理、设计、数据分析等),通过这门课可获得不同能力;
• 能够利用大模型解决相关实际项目需求: 大数据时代,越来越多的企业和机构需要处理海量数据,利用大模型技术可以更好地处理这些数据,提高数据分析和决策的准确性。因此,掌握大模型应用开发技能,可以让程序员更好地应对实际项目需求;
• 基于大模型和企业数据AI应用开发,实现大模型理论、掌握GPU算力、硬件、LangChain开发框架和项目实战技能, 学会Fine-tuning垂直训练大模型(数据准备、数据蒸馏、大模型部署)一站式掌握;
• 能够完成时下热门大模型垂直领域模型训练能力,提高程序员的编码能力: 大模型应用开发需要掌握机器学习算法、深度学习框架等技术,这些技术的掌握可以提高程序员的编码能力和分析能力,让程序员更加熟练地编写高质量的代码。

1.AI大模型学习路线图
2.100套AI大模型商业化落地方案
3.100集大模型视频教程
4.200本大模型PDF书籍
5.LLM面试题合集
6.AI产品经理资源合集
👉获取方式:
😝有需要的小伙伴,可以保存图片到wx扫描二v码免费领取【保证100%免费】🆓


















 237
237

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









