







 本文深入解析Apollo9.0的纵向控制器,包括PID控制、误差计算、车辆标定表和模块输入输出,帮助理解车辆纵向控制逻辑。
本文深入解析Apollo9.0的纵向控制器,包括PID控制、误差计算、车辆标定表和模块输入输出,帮助理解车辆纵向控制逻辑。
本文将对Apollo的纵向控制器进行讲解,看完本文,你将会对百度Apollo的纵向控制有更深的理解
前面文章:
Apollo9.0 PNC源码学习之Control模块(一)
Apollo9.0 PNC源码学习之Control模块(二)
1 纵向控制器简介
control-controller-lon-based-pid-controller 插件包是基于 PID 控制器进行车辆纵向控制计算的控制器实现,车辆纵向控制是在 Frenet 坐标系下,沿着道路参考线切线的方向,控制车辆的位置、速度、加速度按照规划轨迹线的参考位置、参考速度行驶
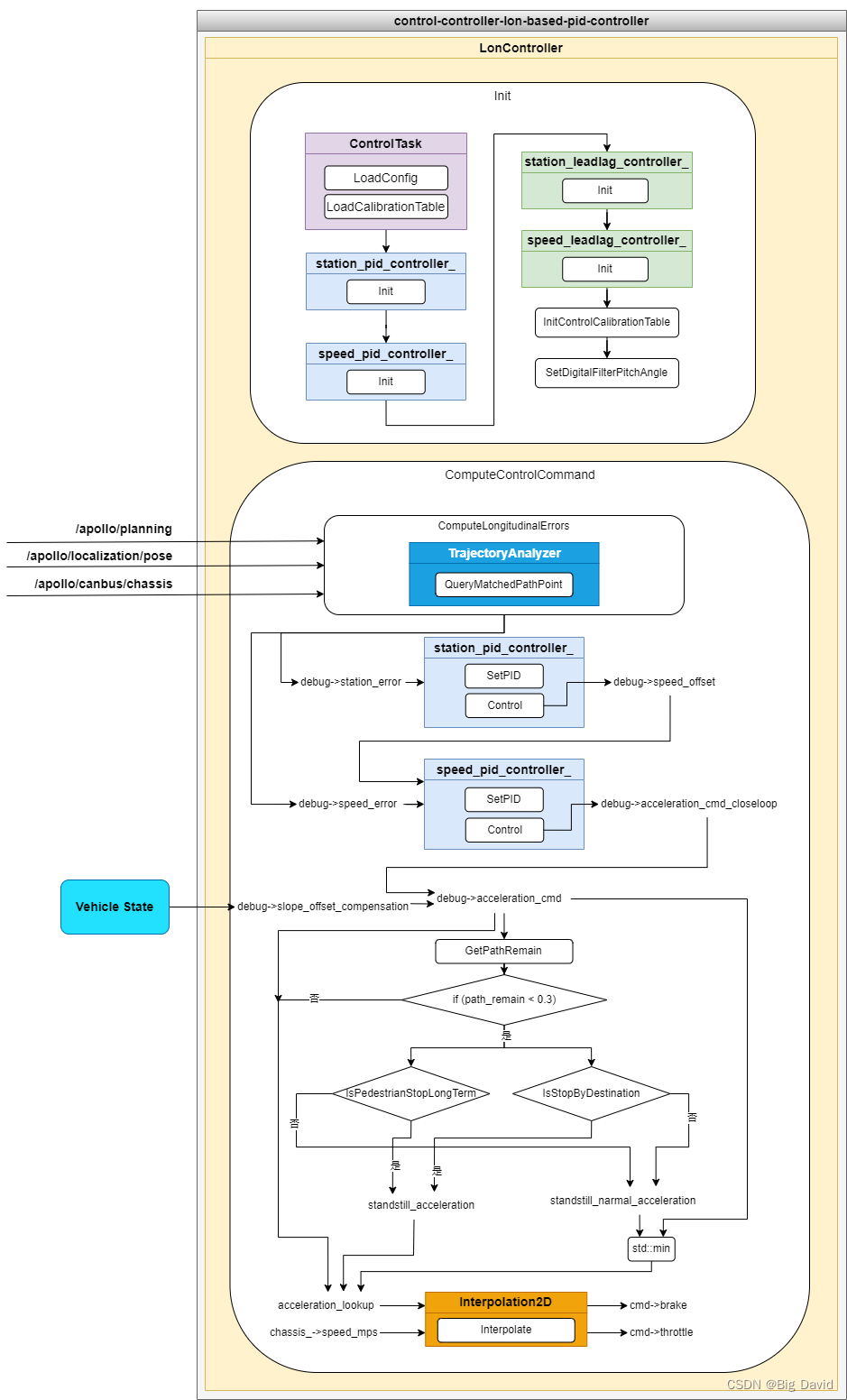
control-controller-lon-based-pid-controller 插件主要包含LonController的实现文件, LonController 是继承 ControlTask 的子类

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 1235
1235

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









