







文章目录
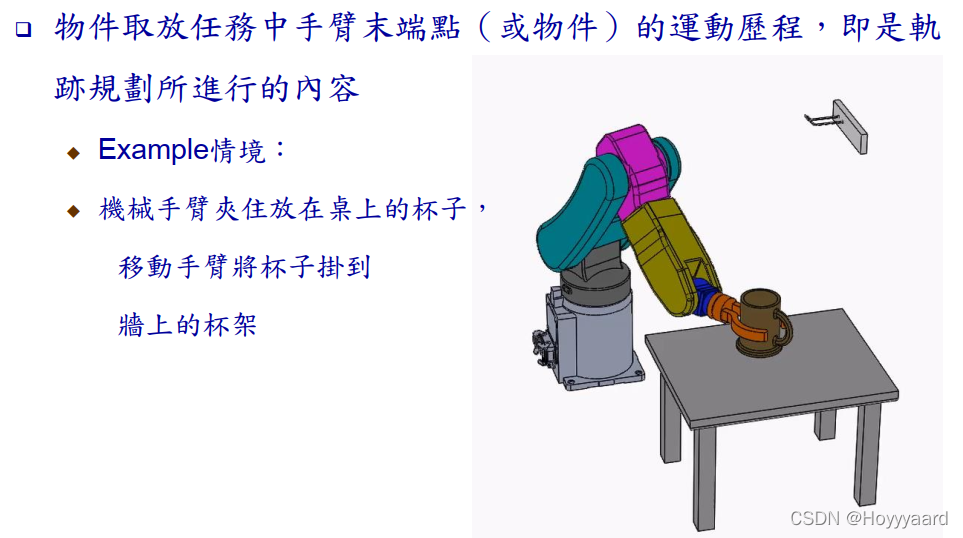
轨迹
- 轨迹即是机械臂末端点或者某操作点的位置速度加速度的历程
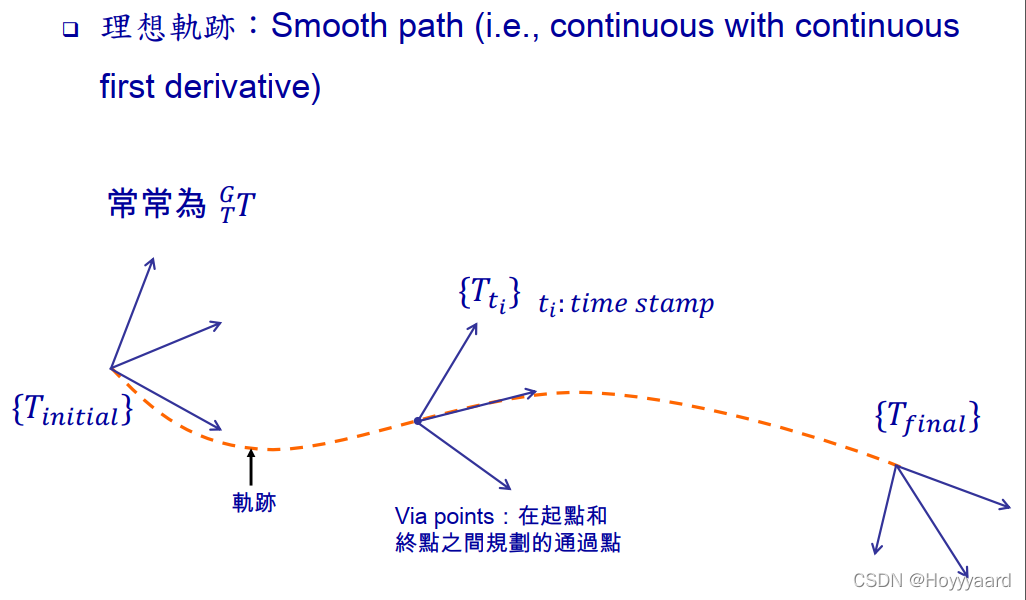
- 理想轨迹
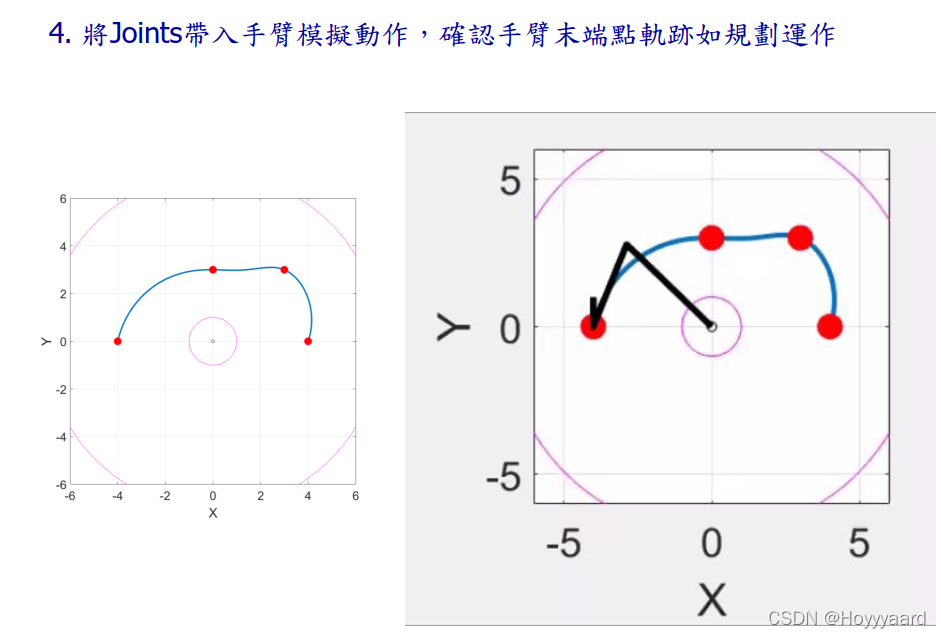
Joint Space下的轨迹规划
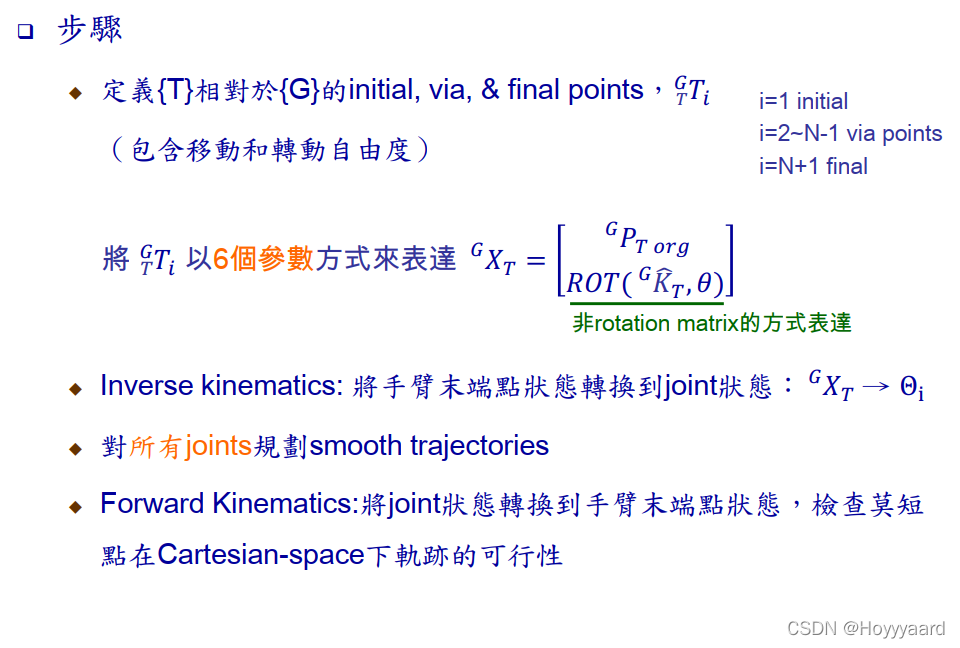
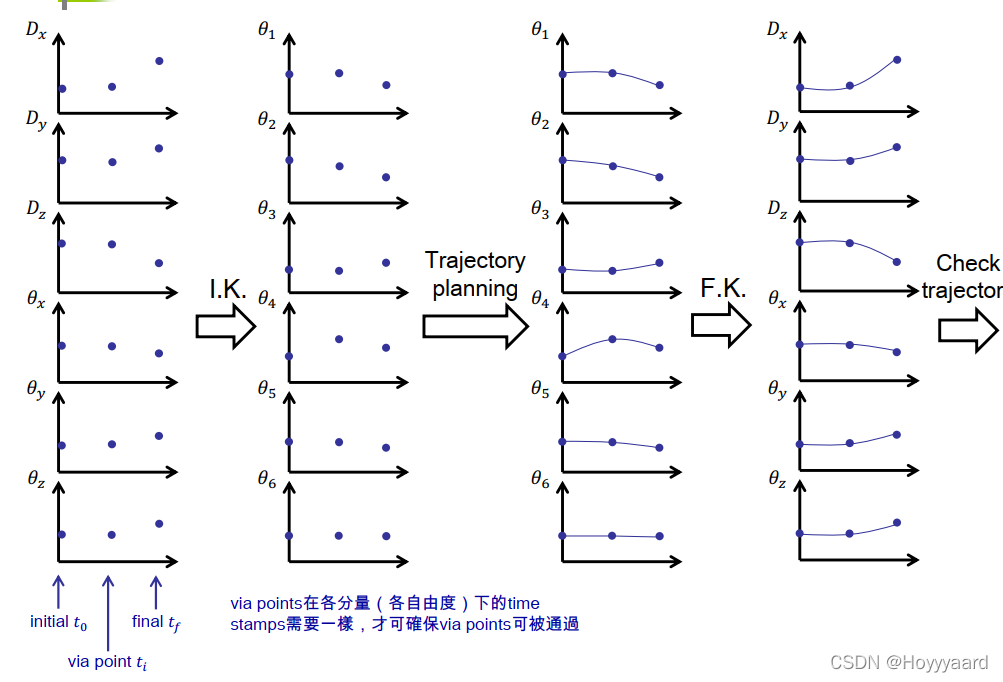
- 定义机械臂末端点相对于物体的初始位置、中间位置、最终位置的转移矩阵
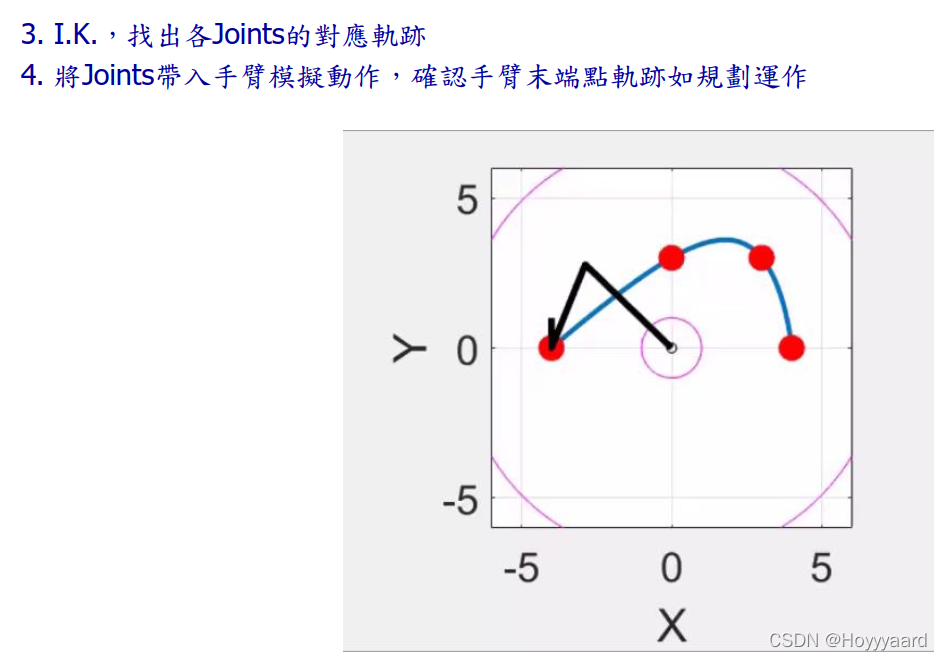
- 由转移矩阵通过IK得到每个Joint的θ
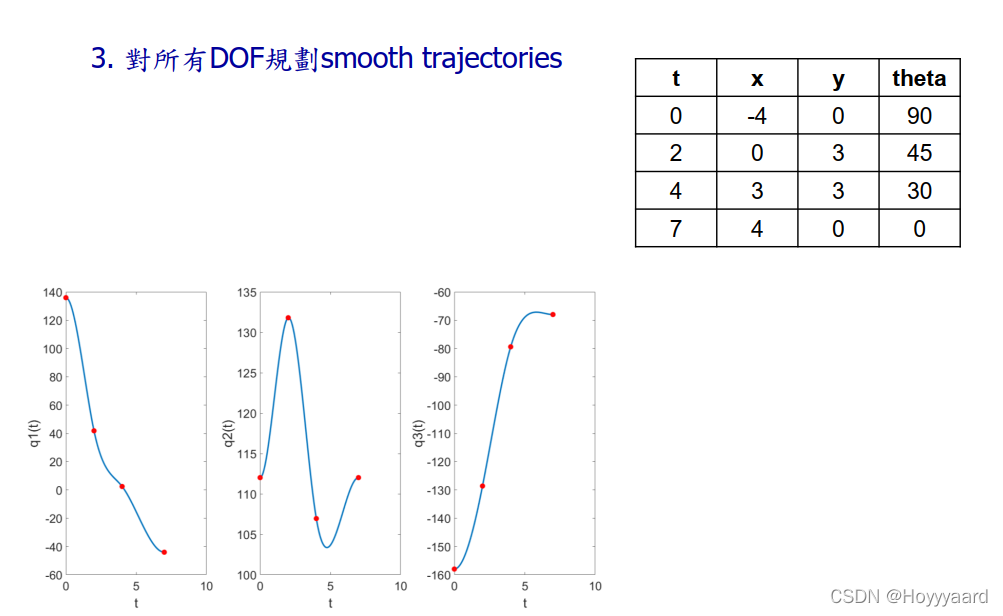
- 将所有θ进行轨迹规划
- FK验证结果
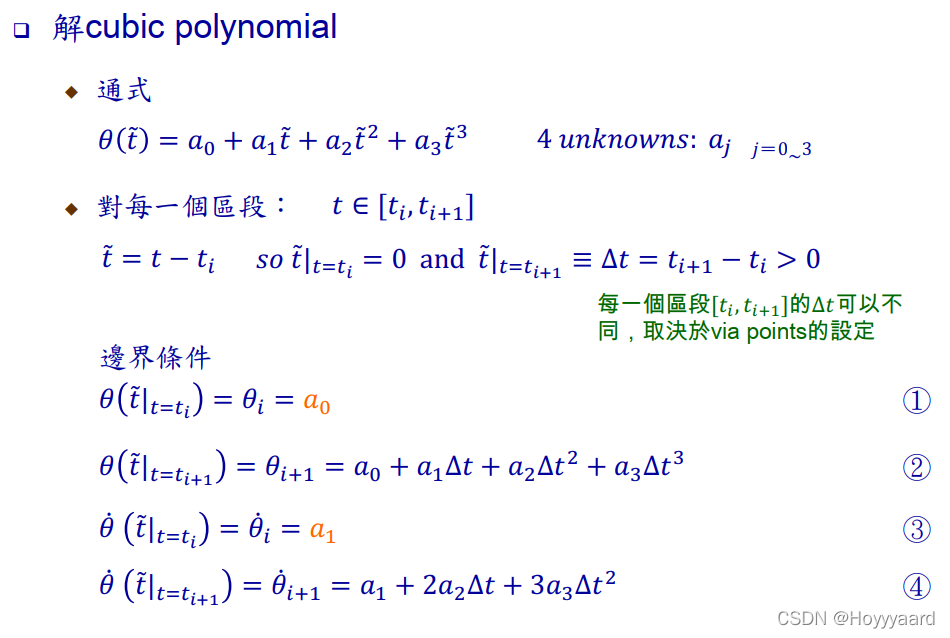
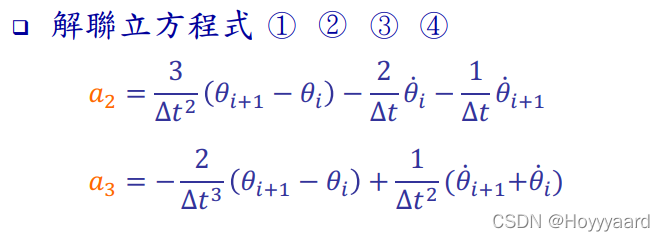
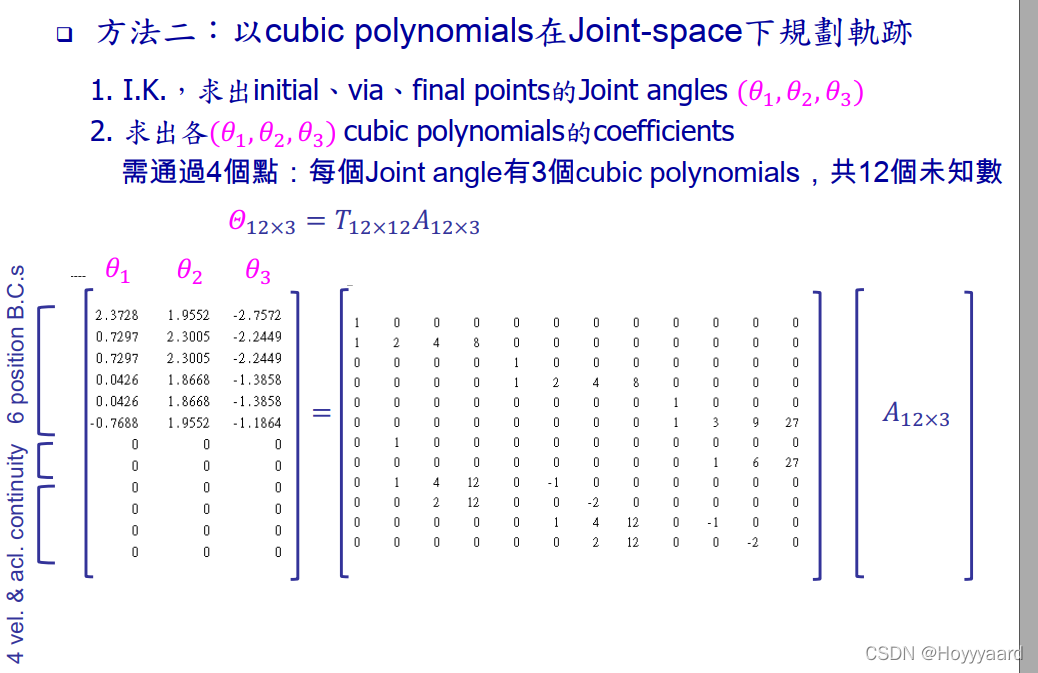
三次多项式规划
- 每两点之间用一个三次多项式表示
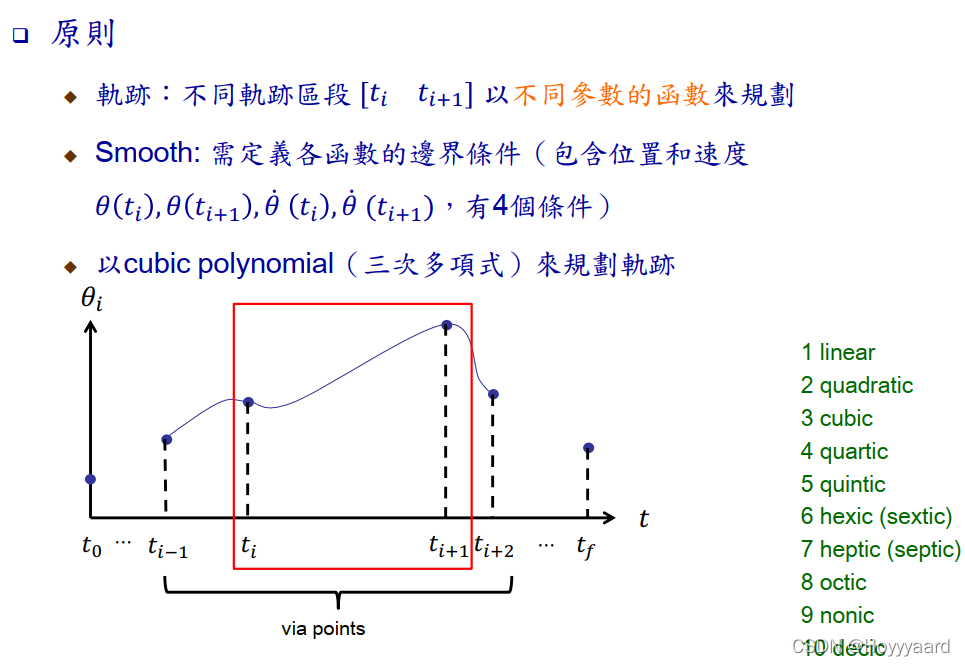
- 4个已知边界条件(两个点的速度和加速度为达到smooth的效果需要前后一致)
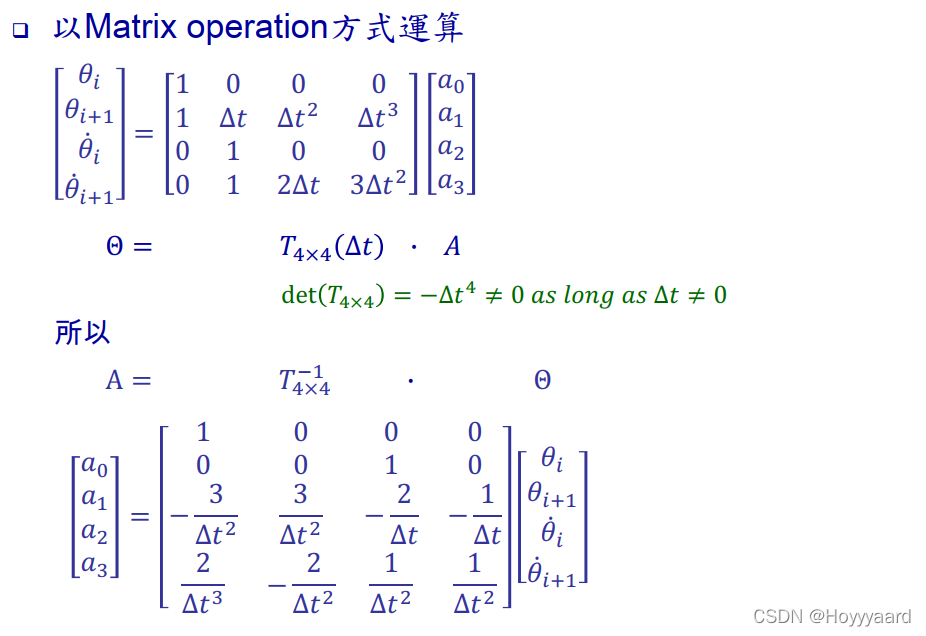
以矩阵的方式运算
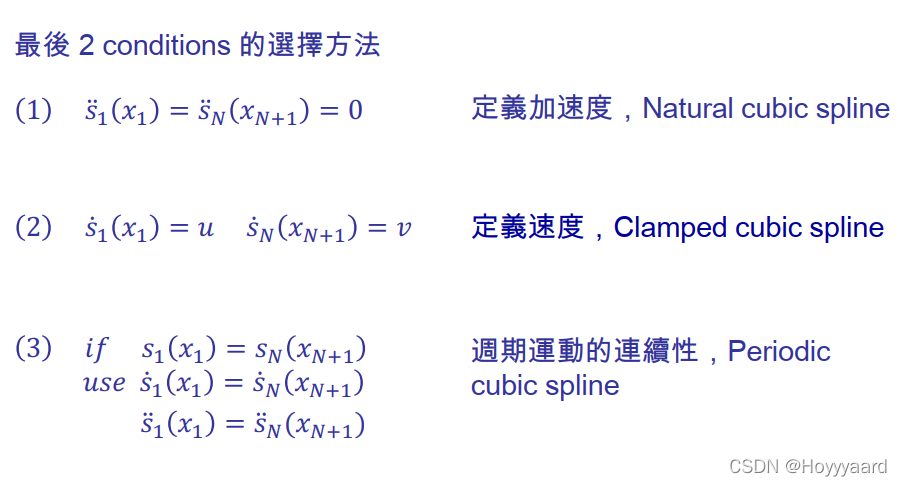
如何选择速度和加速度
- 速度
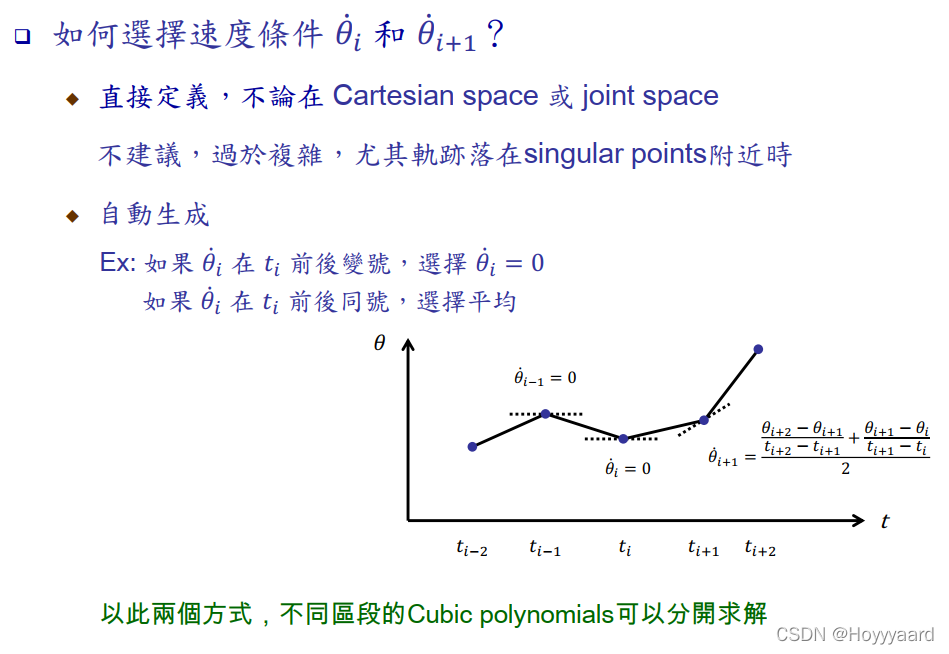
- 加速度需连续
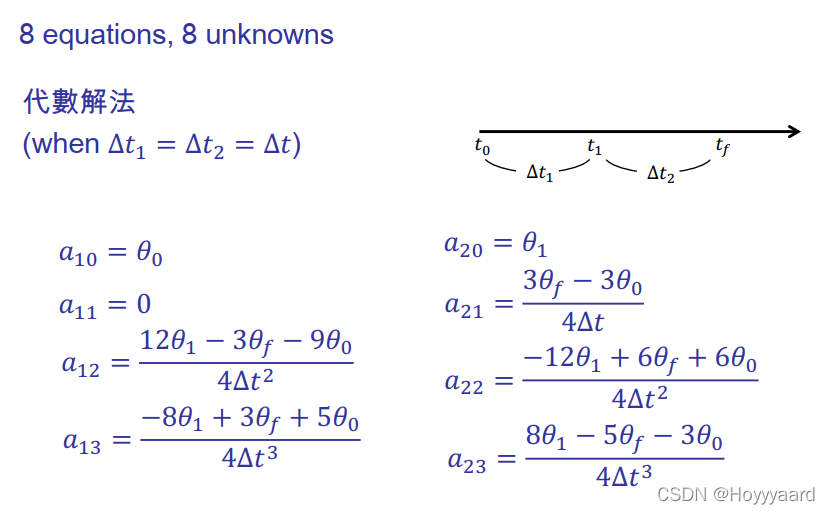
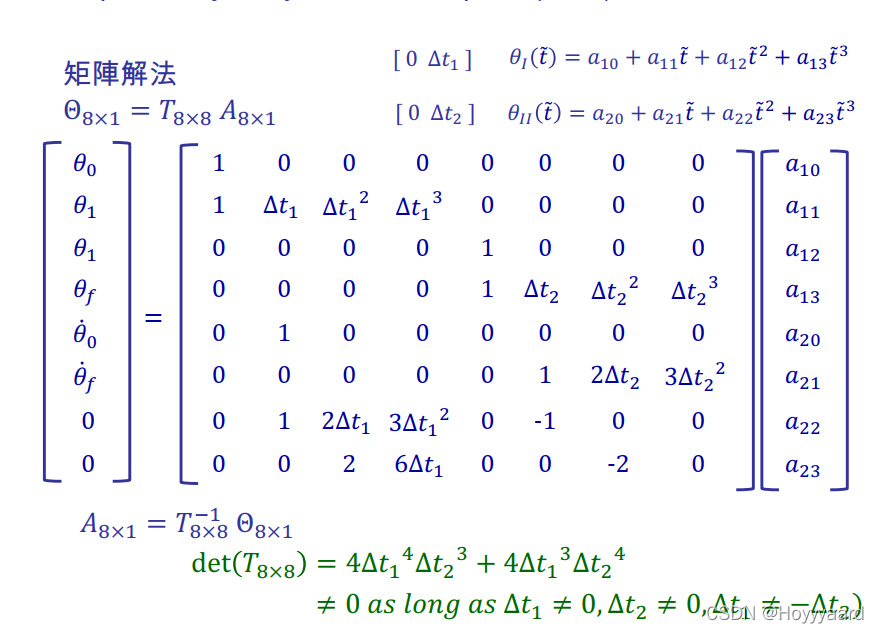
Example: A trajectory with one via point
- 分别用两个多项式表达两段轨迹
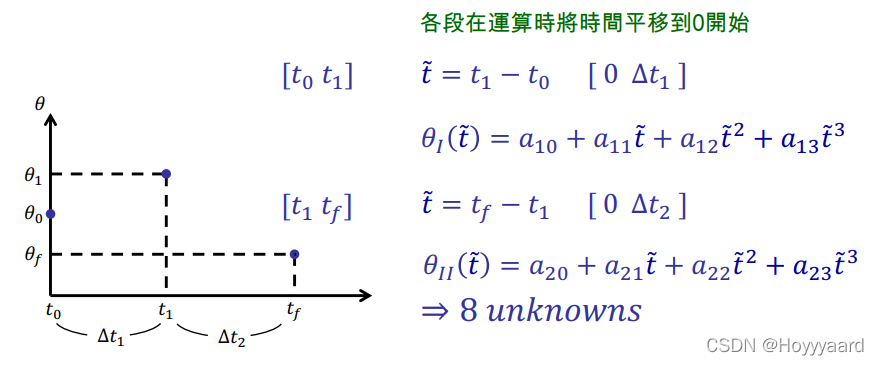
- 已知条件:4个位置信息 起始点和终点的速度信息*2 中间点的前后速度和加速度两段轨迹要一致 * 2 = 8
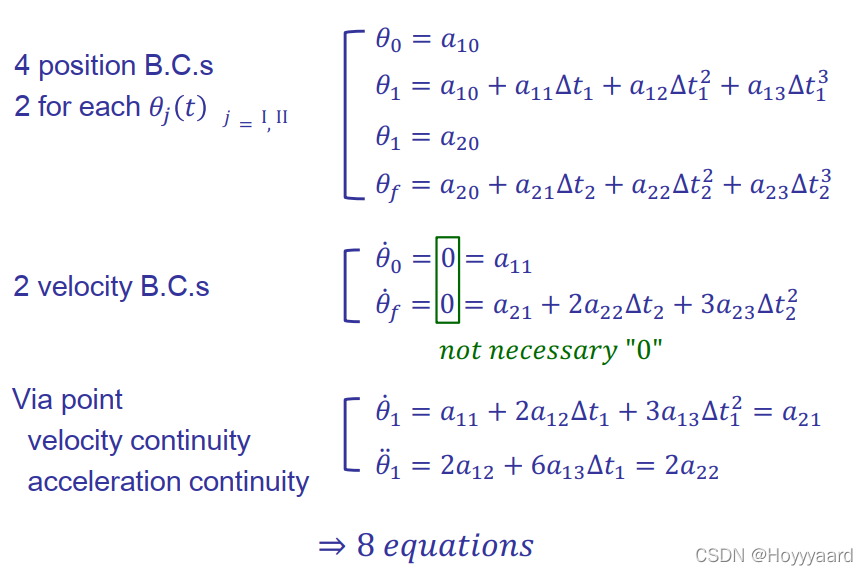
- 代数求解
- 矩阵求解
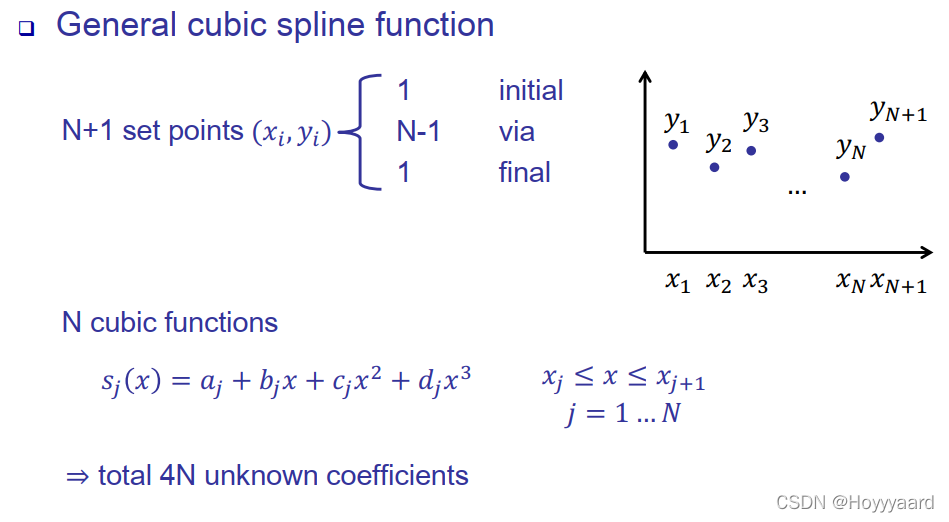
一般情况
- N+1个轨迹点 4N个未知数
- 位置信息可建立2N个等式
- 中间点的速度和加速度可以建立2(N-1)个等式
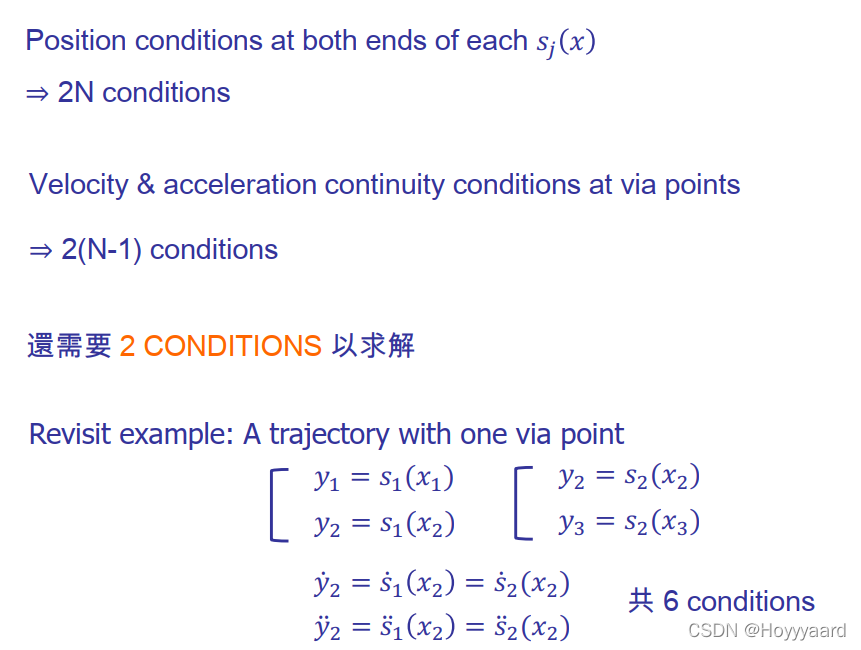
- 最后两个等式靠起始点和终点的速度和加速度建立
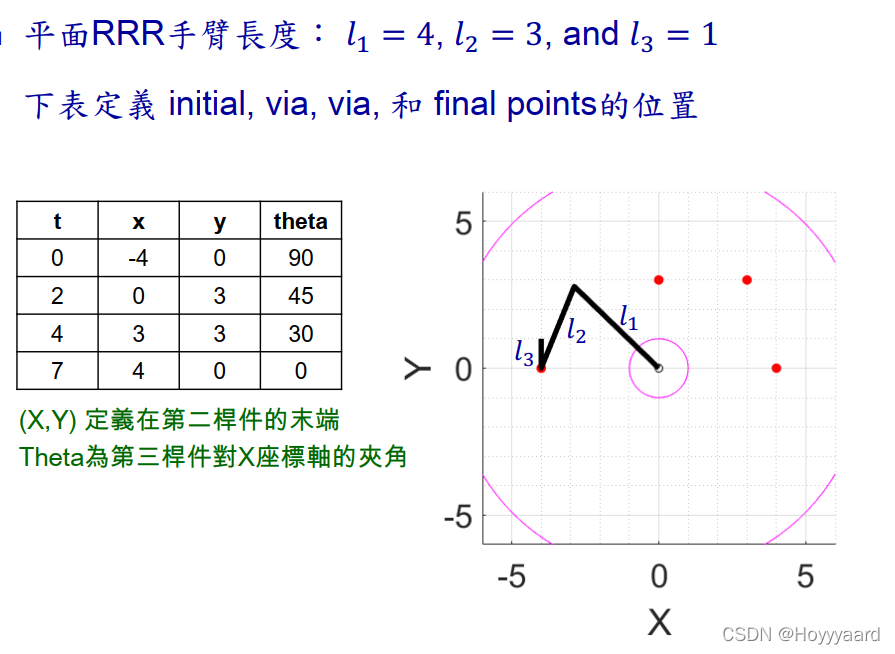
Example: A RRR Manipulator
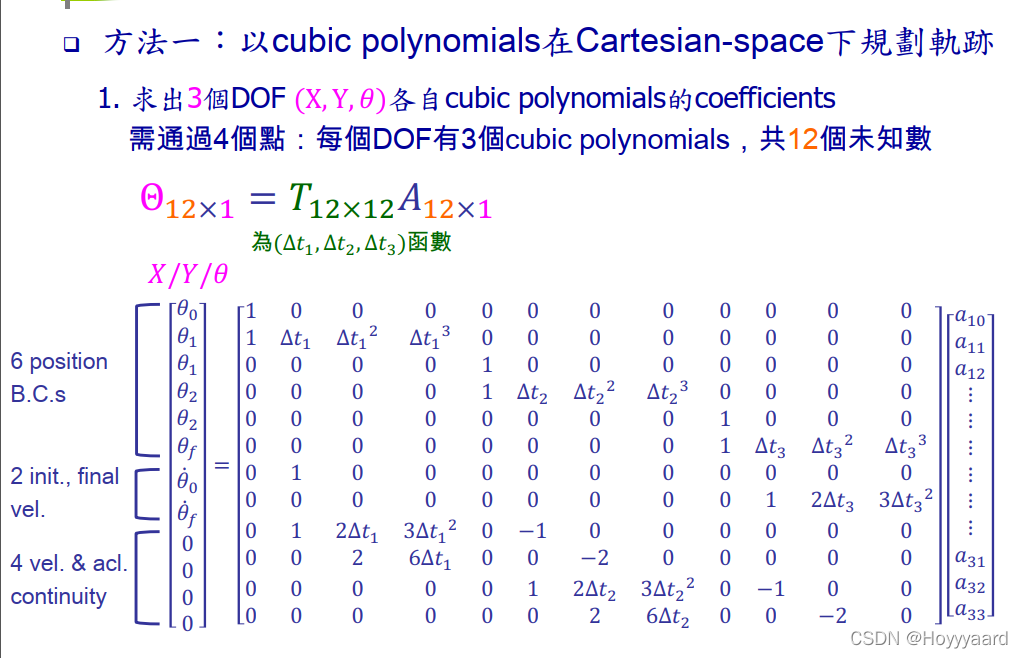
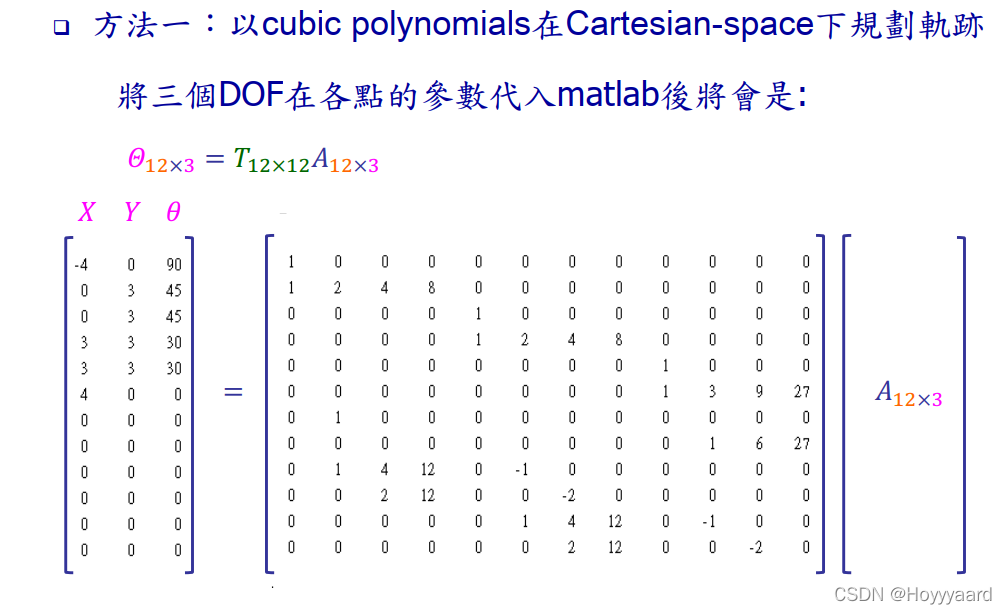
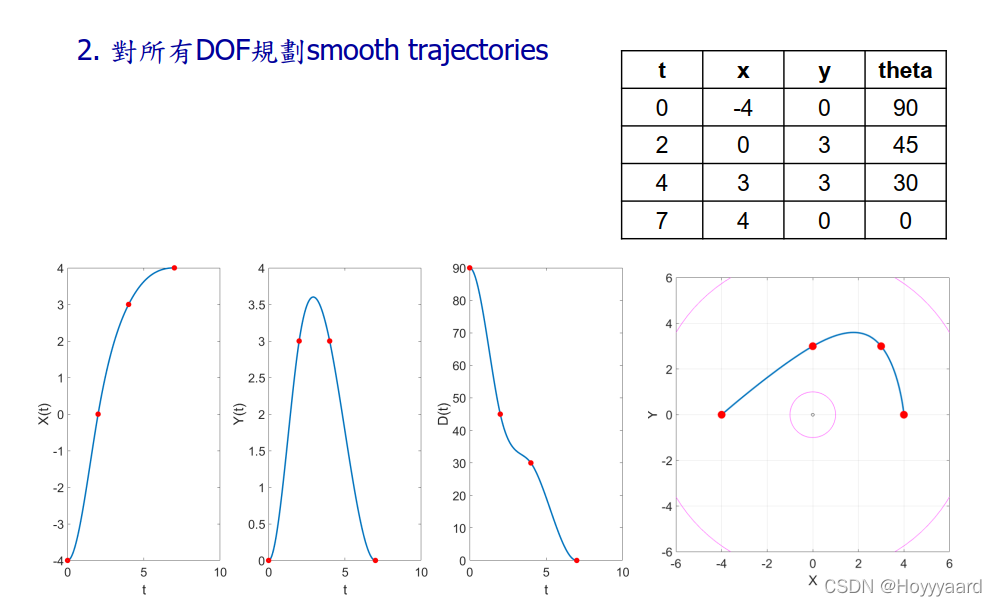
笛卡尔坐标系下规划
- 直接使用 xyθ规划
关节坐标系下规划

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









