










机器人运动模型(算法理论)
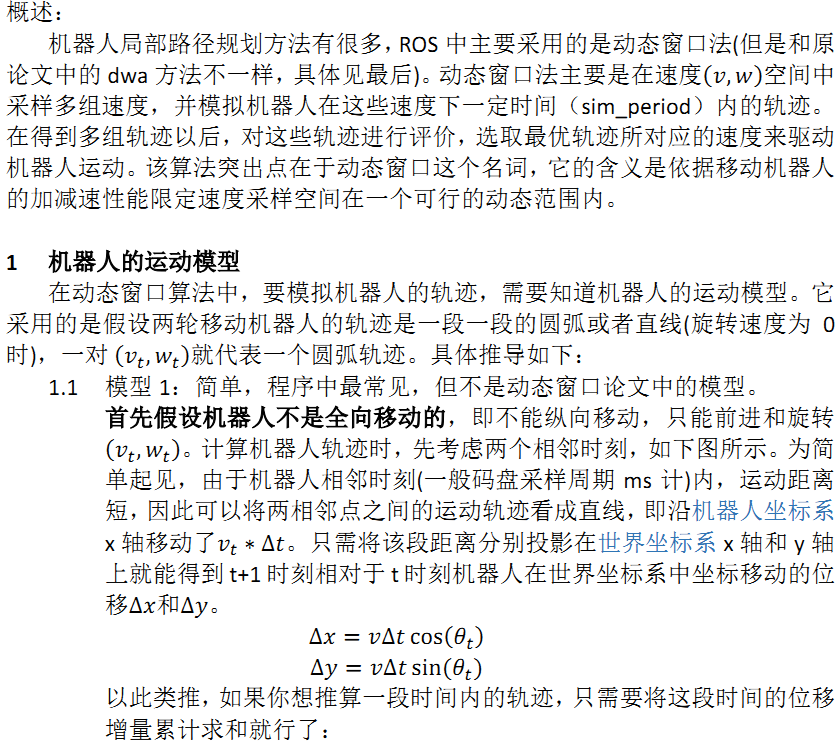
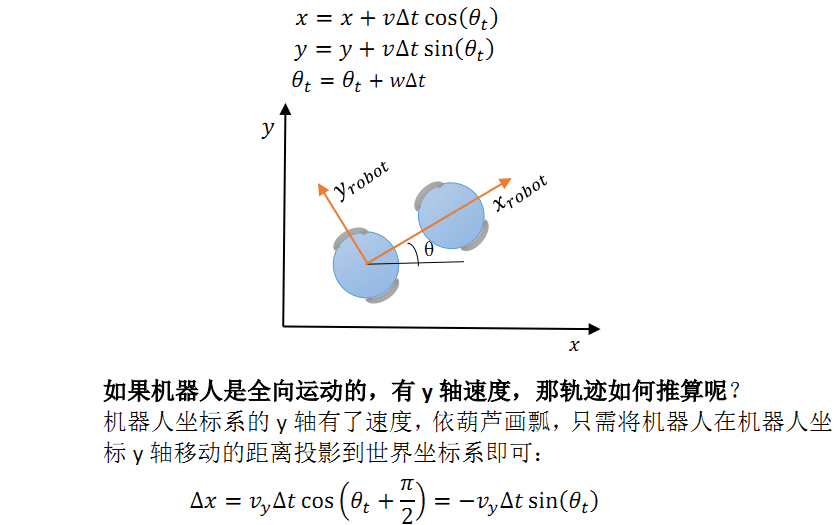
由其他组采集到的轮速数据需要根据公式将速度转化为位移量,具体机器人运动模型有两大类,3小类。如下:
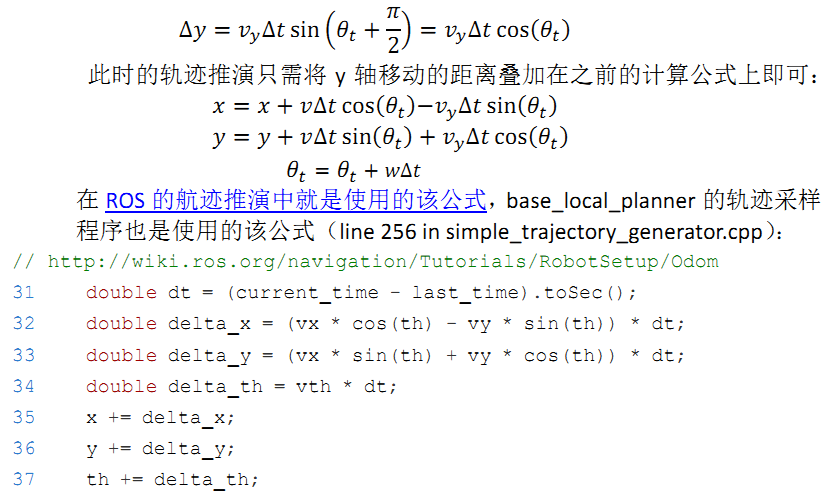
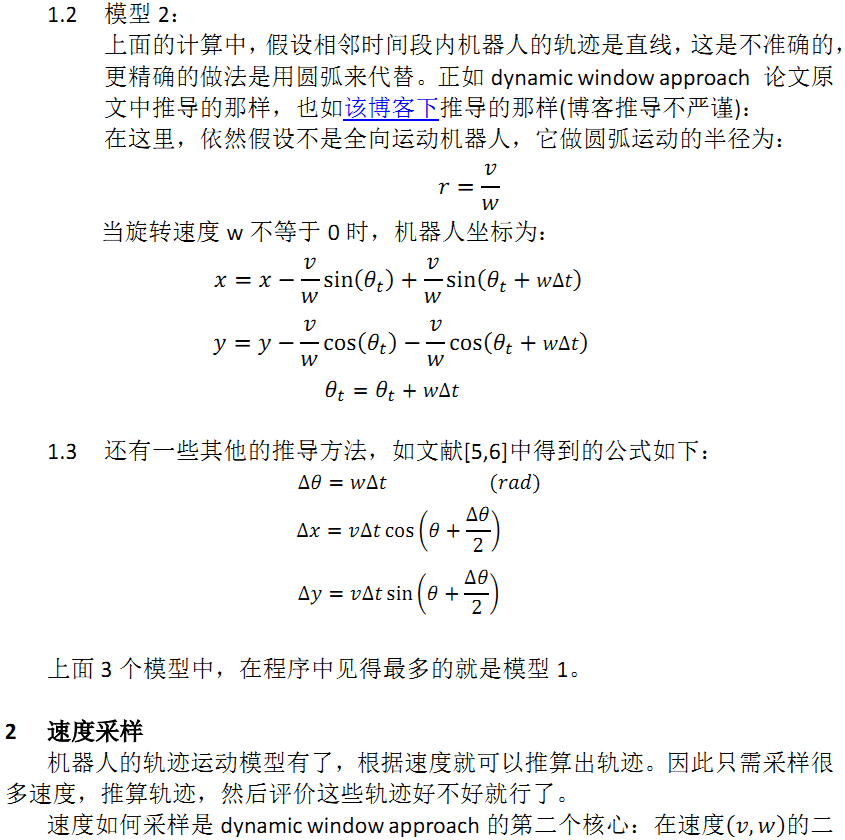
针对模型2详细的说明以及代码实现:
用轮速计实现双轮差动机器人的位姿估计
1、轮速计的工作原理
根据安装在双轮差动机器人左右2个驱动轮电机上的光电编码器,来检测车轮在一定时间内移动的距离,从而推算出机器人相对位姿(位置和航向)的变化。
2、轮速计位姿估计模型
给定车辆的初始定位,根据车辆后轴左、右轮的单位移动距离估计车辆的位姿信息。
3、Matlab代码
XX
4、运行结果
4.1、左右轮移动距离随机生成的结果
4.2、绕圆圈左右轮移动距离的结果
轮速仪精度精度评估(数据实践)
目的:为了验证轮速仪是否可以作为在地下有停车场中位移量的参考,需要先验证轮速仪的精度。
数据:用于验证轮速仪精度的数据是围绕大厦一周的路程,由GPS采集到的rtk数据作为GroundTruth。
实现过程:
- 处理轮速仪数据
根据以上,我们可以计算得到轮速仪在每个时刻的位移变化量,存在文件“wheel_speed_xy.log”中。
备注:由于得到的速度的单位是 0.01km/h,并且轮速仪的频率为20ms,因此在计算时为了统一单位,进行了上述运算。
- 处理rtk数据
采集到的GPS-rtk数据第四列与第五列分别表示经度与纬度,因此需要将其转化为大地坐标,保存在文件“2019-06-12_11-19-30_rtk_GPSData.txt”中。
- 按时间戳对齐,验证精度
由于两组数据频率不同,开始时刻不同,因此需要将两组数据按照时间戳对齐,查看每个对应的时刻轮速仪与GPS的位移量。由于GPS的频率不固定,大约在500ms左右,轮速仪的频率为20ms,因此,将两组数据时刻差值<10ms的数据认为是同一时刻。
rtk时间戳,对应的轮速仪时间戳,轮速仪的δx,rtk的δx,轮速仪的δy,rtk的δy,以及轮速仪的δs,rtk的δs保存在文件“diff_distances.log”中。
为了更便捷的看到两组数据的差距,将轮速时间戳对应的轮速仪的δx,rtk的δx与轮速仪的δs,rtk的δs在图中表示出来。注意的是,轮速仪得到的y值变化很小,因此,轮速仪的δx与轮速仪的δs重合。可以看到随着时间的增加,误差逐渐增大,可能的原因是转弯对齐造成的影响,所以说,轮速仪应该是在直线上更加精确一些。
GPS-rtk数据轨迹为蓝色;wheel_speed数据轨迹为黑色;(两圈多一点的轨迹数据)


模型1计算出的轮速里程计图下


模型2计算出的轮速里程计图下

对比分析:模型1与模型2的不仅轨迹有些许不同,而且相对坐标系也存在偏转。
下一步评测轮速里程计与RTK的误差,还将其误差也绘制了图像:



mean(abs(dist
模型1=1.3524
模型2=1.3517

针对我们数据两种模型差别不大。















 572
572











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









