






 本文探讨了DAB直流变换器的拓扑结构,重点介绍了扩展移相(EPS)调制策略,通过在单移相基础上增加副边移相角,提升控制自由度以优化性能。使用MATLAB进行了电路仿真,以200V输入电压和25μH移相电感为例,展示了端口电压和电感电流的仿真结果。
本文探讨了DAB直流变换器的拓扑结构,重点介绍了扩展移相(EPS)调制策略,通过在单移相基础上增加副边移相角,提升控制自由度以优化性能。使用MATLAB进行了电路仿真,以200V输入电压和25μH移相电感为例,展示了端口电压和电感电流的仿真结果。
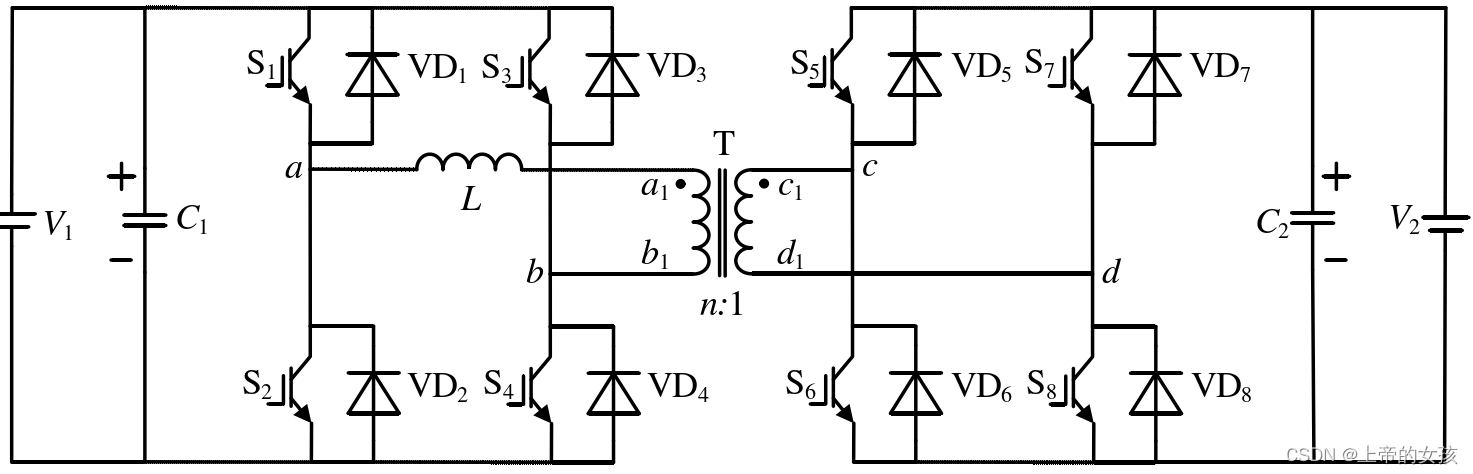
首先简单介绍一下DAB变换器拓扑结构:下图为DAB直流变换器电路拓扑,原副边各有一个带有反并联二极管的H桥组成。V1、V2分别为直流输入、输出电压,高频变压器T的变比为n:1,L为移
相电感,C1和C2为输入和输出电容。DAB变换器主要实现电气隔离条件下的直直电能变换。
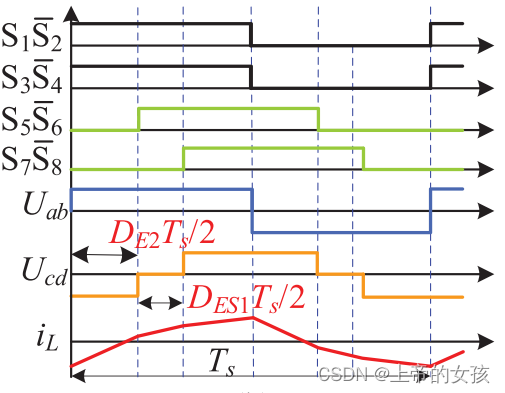
本文将介绍一下扩展移相(EPS)调制策略,在单移相的基础上,选择变换器某一侧全桥内部加入移相角,赋予变换器更高的控制自由度,来实现性能优化。
扩展移相调制本身有多种情况:移相角加入原边或者副边,新加入的移相角大于原副边之间的移相角又或是小于。有四种控制策略。
参考文献《Overview and Comparison of Modulation and Control Strategies for a Nonresonant Single-Phase Dual-Active-Bridge DC–DC Converter》
本文以移相角加入副边为例搭建了仿真。
据此在MATLAB中搭建简单的电路仿真:
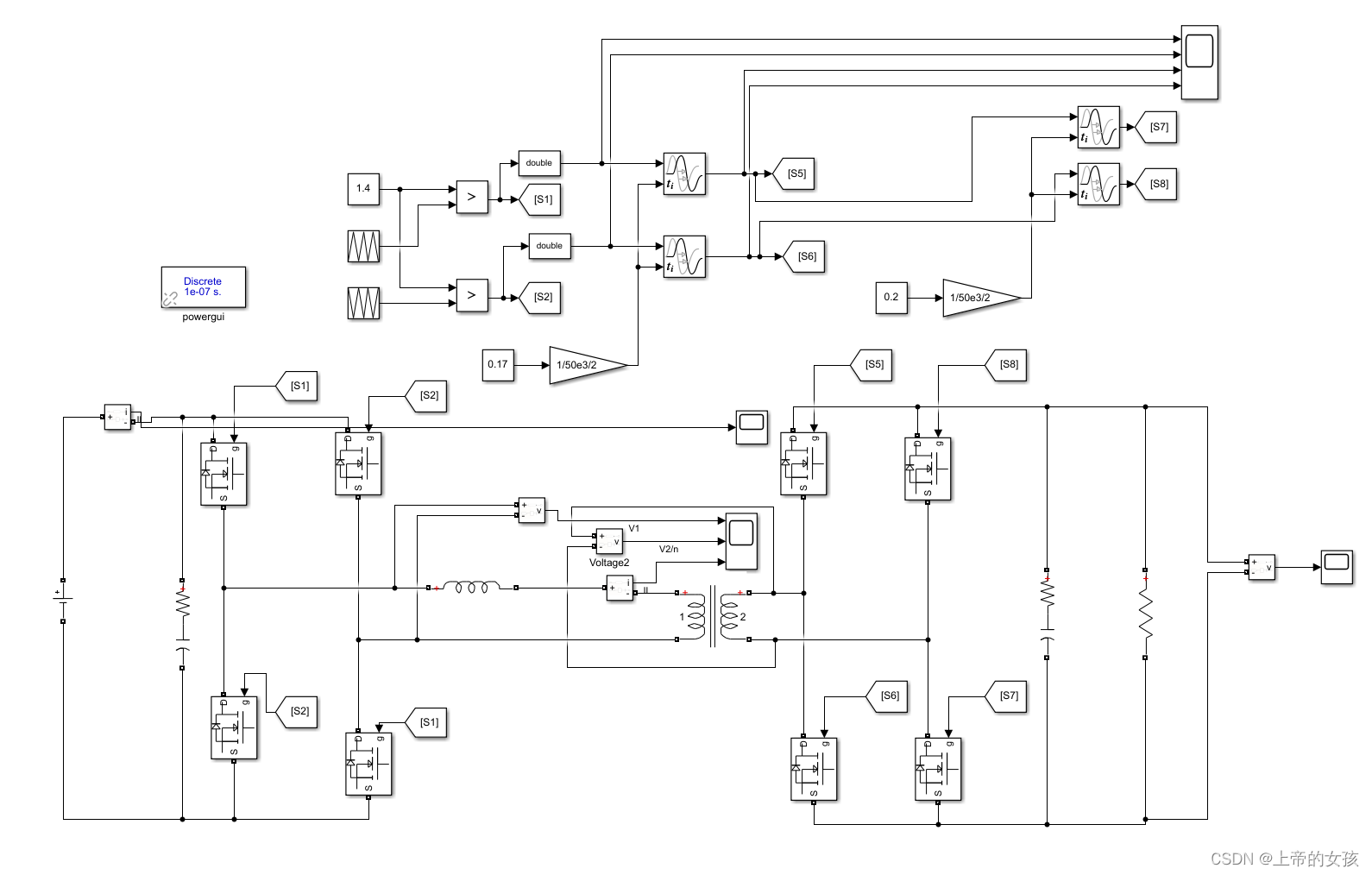
系统参数: 输入电压200V,移相电感25e-6H,负载1欧。
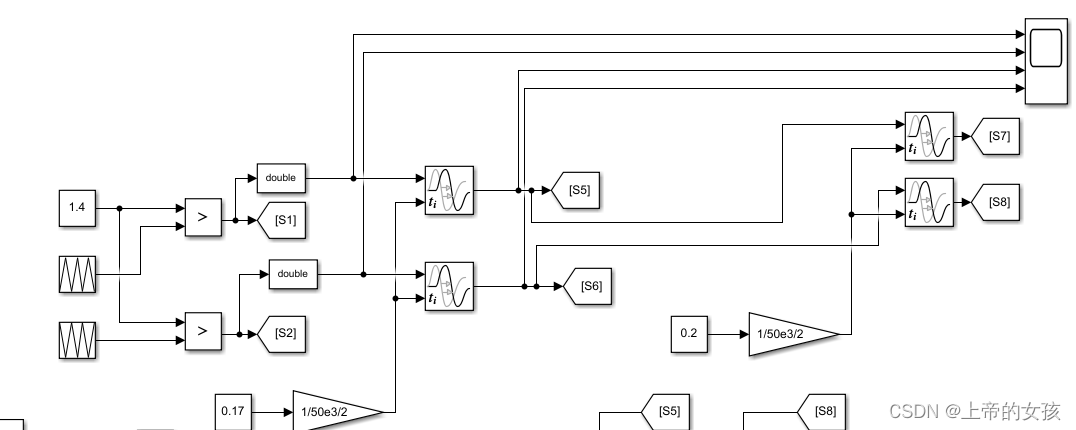
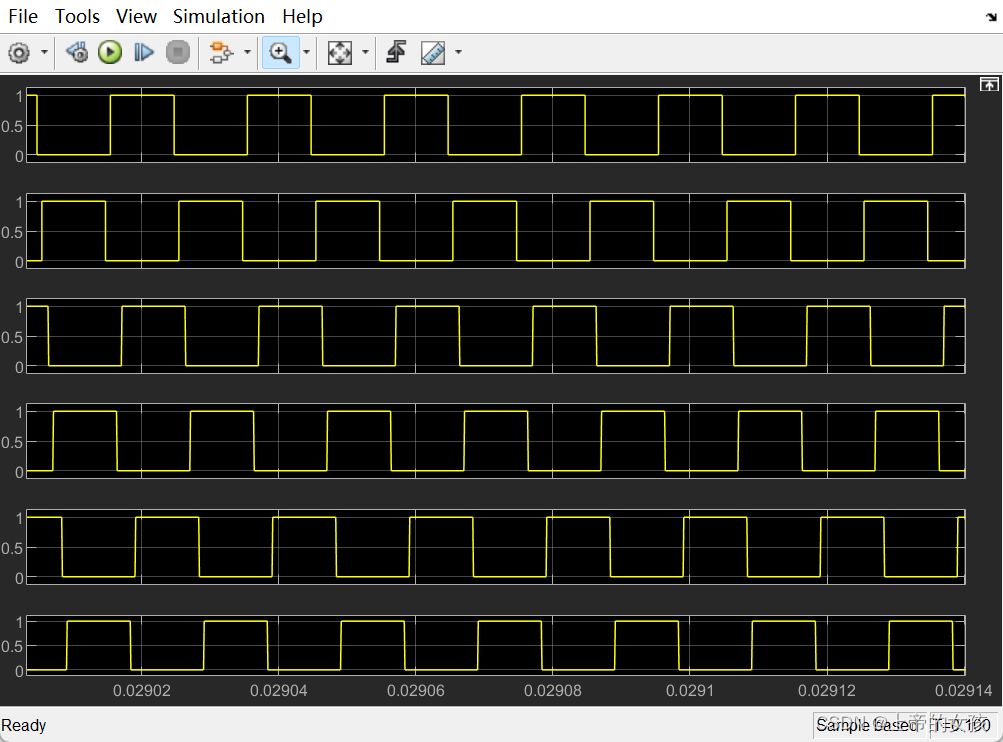
驱动信号通过三角波和调制波实现:
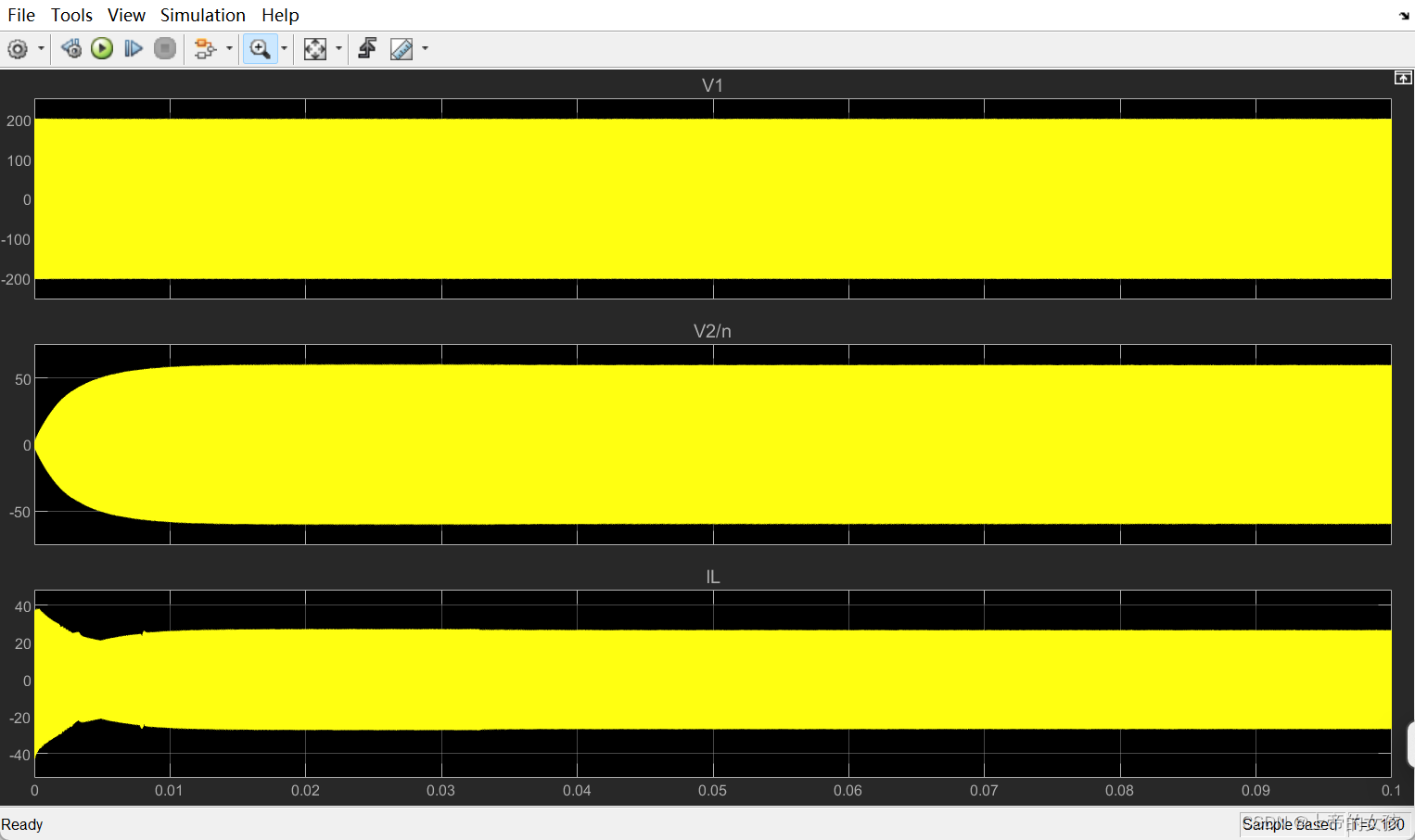
端口电压和电感电流如下图所示:
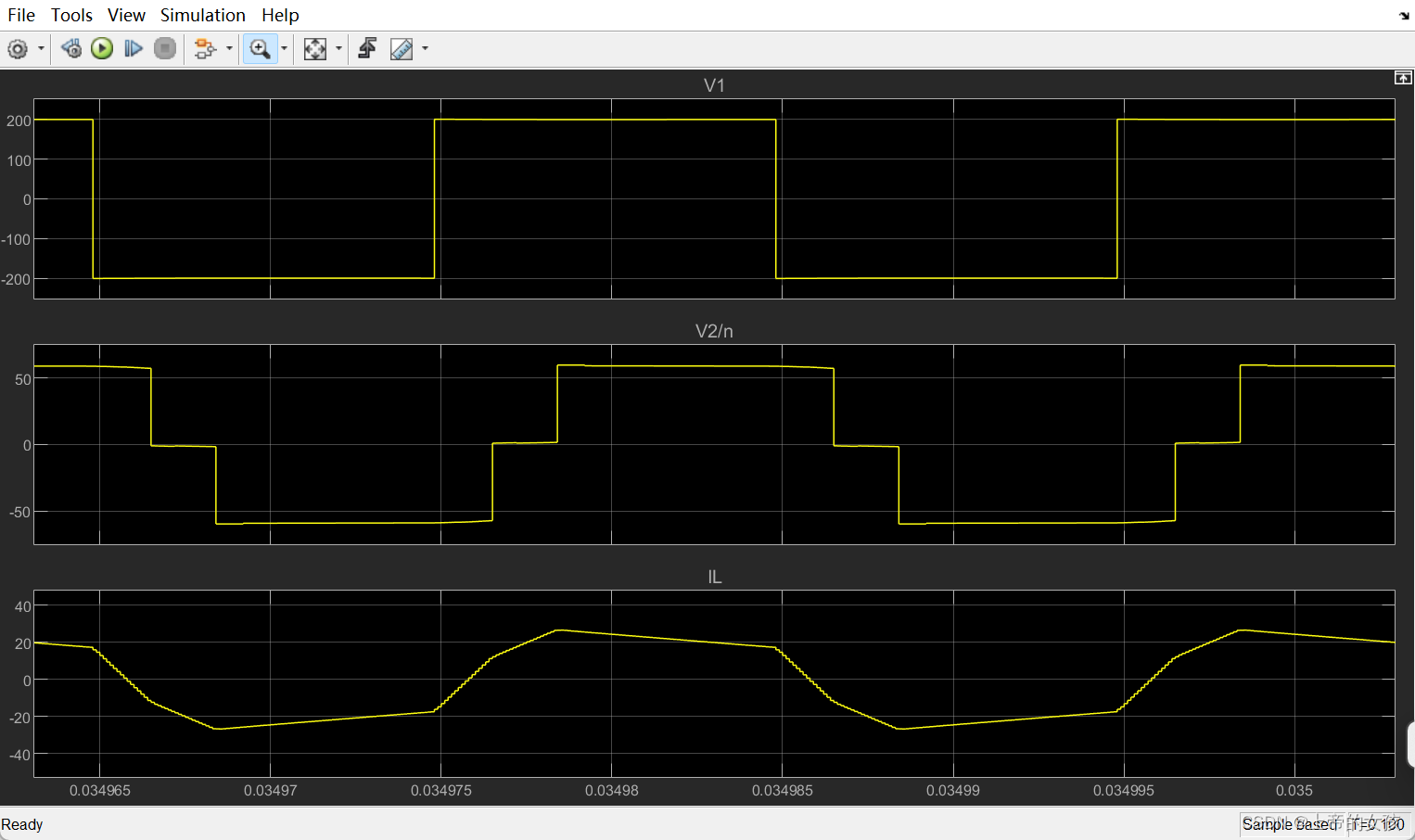
细节如下图:
仿真资源公众号《电力电子仿真学习》或者x🐟:上帝的女孩。

















 289
289

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









