






家人们大家好,我是老张。今天分享一波自动驾驶BEV(Bird-eye view,鸟瞰图视角)感知范式的 开创性工作,NVIDIA提出的LSS(Lift-Splat-Shoot)。尽管时至今日,构建BEV特征的方式逐渐丰富;显式构建BEV特征也不再是必须,但阅读和思考本文仍然会有很多收获。
我的分享包括代码和中文注释,没有太多文字描述与公式,争取三十分钟人人都能看明白,现在发车。论文和官方Repo链接:
arxiv.org/pdf/2008.05711.pdf nv-tlabs/lift-splat-shoot: Lift, Splat,
https://github.com/nv-tlabs/lift-splat-shoot
LSS提出了一种将多视角的相机图像融合在BEV空间下的编码方法,其中:
- Lift是通过预测深度信息,将2D图像编码到3D空间;
- Splat是将3D特征的高度拍扁为BEV特征;
- Shoot是运动规划。
在本工作中,BEV特征空间是以自车为中心的栅格,X轴Y轴最远检测距离各50米,Z轴各10米。这个100 * 100 * 20的空间就是BEV特征需要表征的,栅格内每个位置是空间中该位置的特征。
xbound=[-50.0, 50.0, 0.5], # x方向网格
ybound=[-50.0, 50.0, 0.5], # y方向网格
zbound=[-10.0, 10.0, 20.0], # z方向网格
dbound=[4.0, 45.0, 1.0], # 深度方向网格
将2D图像编码到BEV视角下,需要模型有优质的深度信息,距离预测的准物体在BEV特征中的位置才会准。关于如何把环视摄像机的图片编码到BEV空间下,LSS采用最直接的方式:显式的预测深度信息;另一范式如BEVFormer等则使用Transformer结构,隐式的通过BEV特征空间的query查询2D图像中的特征。
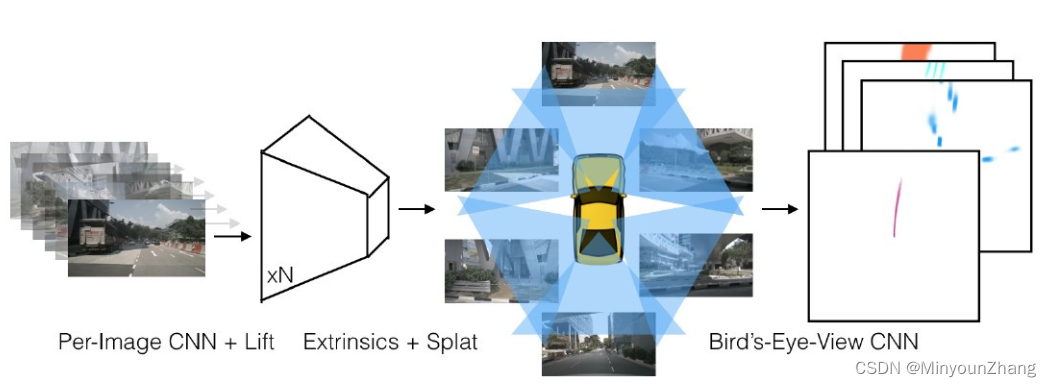
来看模型流水线图,其实Extrinsics+Splat,完整流水线可以分为5部分:
1.生成视锥点云,代表特征图中元素的相机坐标
2.根据相机内外参数、数据增强参数,将视锥点云从相机坐标映射到世界坐标
3.CamEncode网络提取2D图片的深度特征矩阵
4.⭐深度特征绑定视锥点云,Voxel Pooling为BEV特征
5.BEV特征编码,输出
一、2D图片 - > 深度特征
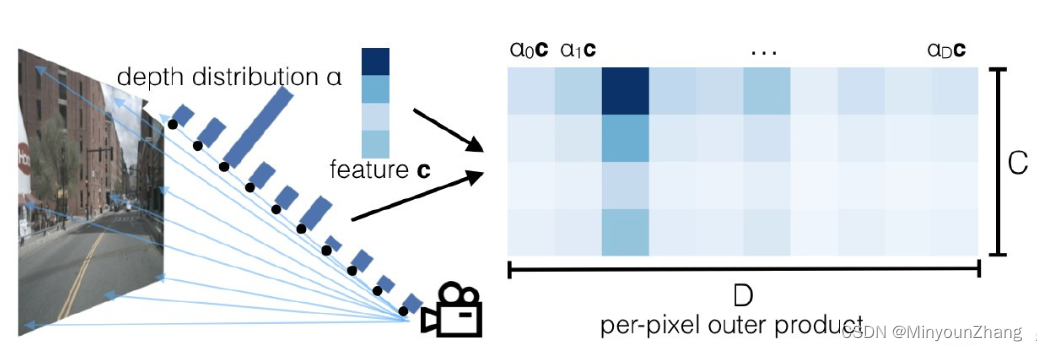
我们先从最容易理解的【3】开始说起,不考虑batch和摄像头数量:一张2D图片的张量维度为【3, W, H】;经过特征提取网络,输出张量为【41+64, Wf, Hf】,Wf和Hf是下采样后特征图的高宽。
输出通道数量105是个特殊值,这里前41个通道表示深度取值范围从4米到45米,后64的通道存放当前点的特征。通道拆分做内积得到64 * 41的矩阵,表示该特征点分别在4 ~ 45米每个深度下的特征值。所以模型最终输出张量维度为【 64, 41, Wf, Hf】,对应代码20 ~21行
下方是论文给的图,把矩阵放到图左边或许会更直观些;本段代码实现特征提取+输出深度特征矩阵,不想看也没关系
class CamEncode(nn.Module): # 提取图像特征,进行图像深度编码
def __init__(self, D, C, downsample):
super(CamEncode, self).__init__()
self.D = D # 41 深度区间【4-45】
self.C = C # 64 点的特征向量维度
self.trunk = EfficientNet.from_pretrained("efficientnet-b0") # efficientnet 提取特征
self.up1 = Up(320+112, 512) # 上采样模块,输入320+112(多尺度融合),输出通道512
self.depthnet = nn.Conv2d(512, self.D + self.C, kernel_size=1, padding=0) # 1x1卷积调整通道数
def get_depth_dist(self, x, eps=1e-20): # 深度维计算softmax,得到每个像素不同深度的概率
return x.softmax(dim=1)
def get_depth_feat(self, x):
x = self.get_eff_depth(x) # 使用efficientnet提取特征 x: BN x 512 x 8 x 22
x = self.depthnet(x) # 1x1卷积变换维度 x: BN x 105(C+D) x 8 x 22
depth = self.get_depth_dist(x[:, :self.D]) # 第二个维度的前D个作为深度维,进行softmax depth: BN x 41 x 8 x 22
new_x = depth.unsqueeze(1) * x[:, self.D:(self.D + self.C)].unsqueeze(2) # 将深度概率分布和特征通道利用广播机制相乘
return depth, new_x # new_x: BN x 64 x 41 x 8 x 22
def get_eff_depth(self, x): # 使用efficientnet提取特征
# adapted from https://github.com/lukemelas/EfficientNet-PyTorch/blob/master/efficientnet_pytorch/model.py#L231
endpoints = dict()
# Stem
x = self.trunk._swish(self.trunk._bn0(self.trunk._conv_stem(x))) # x: BN x 32 x 64 x 176
prev_x = x
# Blocks
for idx, block in enumerate(self.trunk._blocks):
drop_connect_rate = self.trunk._global_params.drop_connect_rate
if drop_connect_rate:
drop_connect_rate *= float(idx) / len(self.trunk._blocks) # scale drop connect_rate
x = block(x, drop_connect_rate=drop_connect_rate)
if prev_x.size(2) > x.size(2):
endpoints['reduction_{}'.format(len(endpoints)+1)] = prev_x
prev_x = x
# Head
endpoints['reduction_{}'.format(len(endpoints)+1)] = x # x: BN x 320 x 4 x 11
x = self.up1(endpoints['reduction_5'], endpoints['reduction_4']) # 对endpoints[4]上采样,然后和endpoints[5] concat 在一起
return x # x: 24 x 512 x 8 x 22
def forward(self, x):
depth, x = self.get_depth_feat(x) # depth: B*N x D x fH x fW(24 x 41 x 8 x 22) x: B*N x C x D x fH x fW(24 x 64 x 41 x 8 x 22)
return x
二、相机坐标->世界坐标的映射关系
然后要回到【1】生成视锥点云。我们得到了单张2D图片的深度特征矩阵。这些特征如何映射到世界坐标系下,和BEV视角的栅格关联上呢?第一步,先建立特征图在世界坐标系下坐标位置的视锥点云,也就是深度特征每个点的在相机坐标系的位置。
CamEncode网络输出维度是【 64, 41, fW, fH】,表示高宽深分别为【fH,fW,41】的立方体中,每个位置特征64维;视锥点云维度【41 x fH x fW x 3】中,3代表XYZ三条坐标轴,因此视锥点云存储立方体每个位置在相机坐标系的XYZ坐标。有些类似位置编码对吧。
def create_frustum(self):
# make grid in image plane
ogfH, ogfW = self.data_aug_conf['final_dim']
fH, fW = ogfH // self.downsample, ogfW // self.downsample # fw和fh是特征图长宽
ds = torch.arange(*self.grid_conf['dbound'], dtype=torch.float).view(-1, 1, 1).expand(-1, fH, fW)
D, _, _ = ds.shape # D是深度区间41,【4-45】
#【0, fW, 2fW, 3fW ..., ogfW-2fW, ogfW-fW, ogfW】
xs = torch.linspace(0, ogfW - 1, fW, dtype=torch.float).view(1, 1, fW).expand(D, fH, fW)
ys = torch.linspace(0, ogfH - 1, fH, dtype=torch.float).view(1, fH, 1).expand(D, fH, fW)
# D x fH x fW x 3
frustum = torch.stack((xs, ys, ds), -1)
return nn.Parameter(frustum, requires_grad=False) # 不计算梯度
步骤【2】坐标系转换。这些特征点的在相机坐标系的位置,需要通过相机内外参数映射到世界坐标系下。代码中的映射涉及仿射变化和相机参数,如果没接触过,跳过这部分也不会影响理解论文。注意有6张不同方向的环视摄像头图片,所以内外参是6部相机的内外参数组成。
def get_geometry(self, rots, trans, intrins, post_rots, post_trans):
"""
rots:相机外参旋转, trans:相机外参平移, intrins:相机内参, post_rots:数据增强旋转, post_trans:数据增强平移
Determine the (x,y,z) locations (in the ego frame) of the points in the point cloud.
Returns B x N x D x H/downsample x W/downsample x 3
"""
B, N, _ = trans.shape
# undo post-transformation
# B x N x D x H x W x 3,先还原数据增强中旋转和平移对坐标的影响
points = self.frustum - post_trans.view(B, N, 1, 1, 1, 3)
points = torch.inverse(post_rots).view(B, N, 1, 1, 1, 3, 3).matmul(points.unsqueeze(-1))
# cam_to_ego,利用相机内外参
points = torch.cat((points[:, :, :, :, :, :2] * points[:, :, :, :, :, 2:3],
points[:, :, :, :, :, 2:3]
), 5)
combine = rots.matmul(torch.inverse(intrins))
points = combine.view(B, N, 1, 1, 1, 3, 3).matmul(points).squeeze(-1)
points += trans.view(B, N, 1, 1, 1, 3)
return points #维度不变,坐标值从相机坐标系->世界坐标系
三、BEV池化
至此,我们将6个环视摄像头拍摄的图片,通过显式的计算41个深度下的特征,将这【6,41 ,fW, fH】个特征点一一放置在了早先准备好的BEV特征空间下。终于可以到达【4】,构建BEV特征。
在这张像棋盘一样的BEV特征空间中,有位置放了多个特征点,有的位置没放特征点,因此需要【4】在每个栅格进行BEV池化,得到尺寸统一的BEV特征。
官方代码的实现是:
- 先根据特征点的XYZ坐标和batch,计算每个点的索引值;索引值相同的点位于同一个栅格中;【代码26-30】
- 根据索引值排序,则索引值变为有序数组,形如【1.2,1.4,2,4,4,5 … 】;
- 只需“遍历”索引值,将相同索引值的位置求和,完成池化,形如【1.2+1.4,2,4+4,5 … 】
下方voxel_pooling函数准备索引,BEV池化在QuickCumsum类中进行;
def voxel_pooling(self, geom_feats, x):
# geom_feats: B x N x D x H x W x 3 (4 x 6 x 41 x 8 x 22 x 3)
# x: B x N x D x fH x fW x C(4 x 6 x 41 x 8 x 22 x 64)
B, N, D, H, W, C = x.shape # B: 4 N: 6 D: 41 H: 8 W: 22 C: 64
Nprime = B*N*D*H*W # Nprime: 173184
# flatten x
x = x.reshape(Nprime, C) # 将图像展平,一共有 B*N*D*H*W 个点
# flatten indices
geom_feats = ((geom_feats - (self.bx - self.dx/2.)) / self.dx).long() # 将[-50,50] [-10 10]的范围平移到[0,100] [0,20],计算栅格坐标并取整
geom_feats = geom_feats.view(Nprime, 3) # 将像素映射关系同样展平 geom_feats: B*N*D*H*W x 3 (173184 x 3)
batch_ix = torch.cat([torch.full([Nprime//B, 1], ix,
device=x.device, dtype=torch.long) for ix in range(B)]) # 每个点对应于哪个batch
geom_feats = torch.cat((geom_feats, batch_ix), 1) # geom_feats: B*N*D*H*W x 4(173184 x 4), geom_feats[:,3]表示batch_id
# filter out points that are outside box
# 过滤掉在边界线之外的点 x:0~199 y: 0~199 z: 0
kept = (geom_feats[:, 0] >= 0) & (geom_feats[:, 0] < self.nx[0])\
& (geom_feats[:, 1] >= 0) & (geom_feats[:, 1] < self.nx[1])\
& (geom_feats[:, 2] >= 0) & (geom_feats[:, 2] < self.nx[2])
x = x[kept] # x: 168648 x 64
geom_feats = geom_feats[kept]
# get tensors from the same voxel next to each other
ranks = geom_feats[:, 0] * (self.nx[1] * self.nx[2] * B)\
+ geom_feats[:, 1] * (self.nx[2] * B)\
+ geom_feats[:, 2] * B\
+ geom_feats[:, 3] # 给每一个点一个rank值,rank相等的点在同一个batch,并且在在同一个格子里面
sorts = ranks.argsort()
x, geom_feats, ranks = x[sorts], geom_feats[sorts], ranks[sorts] # 按照rank排序,这样rank相近的点就在一起了
# x: 168648 x 64 geom_feats: 168648 x 4 ranks: 168648
# cumsum trick
if not self.use_quickcumsum:
x, geom_feats = cumsum_trick(x, geom_feats, ranks)
else:
x, geom_feats = QuickCumsum.apply(x, geom_feats, ranks) # 一个batch的一个格子里只留一个点 x: 29072 x 64 geom_feats: 29072 x 4
# griddify (B x C x Z x X x Y)
final = torch.zeros((B, C, self.nx[2], self.nx[0], self.nx[1]), device=x.device) # final: 4 x 64 x 1 x 200 x 200
final[geom_feats[:, 3], :, geom_feats[:, 2], geom_feats[:, 0], geom_feats[:, 1]] = x # 将x按照栅格坐标放到final中
# collapse Z
final = torch.cat(final.unbind(dim=2), 1) # 消除掉z维
return final # final: 4 x 64 x 200 x 200
torch.autograd.Function是自定义的算子,路径已经变了,能在python层面自定义算子的前向和后向过程。代码中前向过程使用前缀和区间求和;向量错位比较前后元素是否一致,这些计算步骤都使计算过程向量化;前向过程存储了保留下特征的位置,反向过程再使用前缀和技巧,将特征保留位置的梯度分给求和的位置
class QuickCumsum(torch.autograd.Function):
@staticmethod
def forward(ctx, x, geom_feats, ranks):
# x: 168648 x 64 geom_feats: 168648 x 4 ranks: 168648 x
x = x.cumsum(0) # 求前缀和 x: 168648 x 64
kept = torch.ones(x.shape[0], device=x.device, dtype=torch.bool) # kept: 168648 x
kept[:-1] = (ranks[1:] != ranks[:-1]) # rank错位比较,rank[0]!=rank[1],则留下rank[1]
x, geom_feats = x[kept], geom_feats[kept] # rank值相等的点只留下最后一个,即一个batch中的一个格子里只留最后一个点 x: 29072 geom_feats: 29072 x 4
x = torch.cat((x[:1], x[1:] - x[:-1])) # x错位相减,还原前缀和之前的x,此时点的feature是rank相同点之和,相当于把同一个格子的点特征进行了sum
# save kept for backward
ctx.save_for_backward(kept)
# no gradient for geom_feats
ctx.mark_non_differentiable(geom_feats)
return x, geom_feats
@staticmethod
def backward(ctx, gradx, gradgeom):
kept, = ctx.saved_tensors
back = torch.cumsum(kept, 0)
back[kept] -= 1
val = gradx[back]
return val, None, None
以上是本文主要的创新点。当然鉴于完整性,也奉上BEV特征编码部分代码,总而言之用卷积堆了些计算量,并做了多尺度融合。在这个位置堆计算量是很必要的,因为在此之前所有特征的计算是相机之间独立的,现在所有特征都统一到BEV视角,当然要利用好相机之间特征的语义信息,把BEV特征做大做强。
四、BEV空间下特征再编码
class BevEncode(nn.Module):
def __init__(self, inC, outC): # inC: 64 outC: 1
super(BevEncode, self).__init__()
# 使用resnet的前3个stage作为backbone
trunk = resnet18(pretrained=False, zero_init_residual=True)
self.conv1 = nn.Conv2d(inC, 64, kernel_size=7, stride=2, padding=3,
bias=False)
self.bn1 = trunk.bn1
self.relu = trunk.relu
self.layer1 = trunk.layer1
self.layer2 = trunk.layer2
self.layer3 = trunk.layer3
self.up1 = Up(64+256, 256, scale_factor=4)
self.up2 = nn.Sequential( # 2倍上采样->3x3卷积->1x1卷积
nn.Upsample(scale_factor=2, mode='bilinear',
align_corners=True),
nn.Conv2d(256, 128, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.Conv2d(128, outC, kernel_size=1, padding=0),
)
def forward(self, x): # x: 4 x 64 x 200 x 200
x = self.conv1(x) # x: 4 x 64 x 100 x 100
x = self.bn1(x)
x = self.relu(x)
x1 = self.layer1(x) # x1: 4 x 64 x 100 x 100
x = self.layer2(x1) # x: 4 x 128 x 50 x 50
x = self.layer3(x) # x: 4 x 256 x 25 x 25
x = self.up1(x, x1) # 给x进行4倍上采样然后和x1 concat 在一起 x: 4 x 256 x 100 x 100
x = self.up2(x) # 2倍上采样->3x3卷积->1x1卷积 x: 4 x 1 x 200 x 200
return x
**训练时,模型输入6路环视摄像头图片和相机内外参数;输出在BEV视角下的特征图,标签同样是BEV视角下网格的类别真值,按照网格逐个计算交叉熵;**至于数据增强等技巧,就感兴趣自行查阅代码吧
不得不说,阅读这样从方法到代码都很干净的工作真好。好了家人们,今天就到这吧,我是老张,我们有缘下次见!

















 903
903

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









