







一. 前言
小白将使用视觉捕捉系统的标定、使用和记录文档的过程记录如下,方便大家快速使用。
二. 组成:
视觉捕捉系统OptiTrack,包含摄像头及支架,路由器(交换机),电脑安装的软件motive
三.搭建流程概述
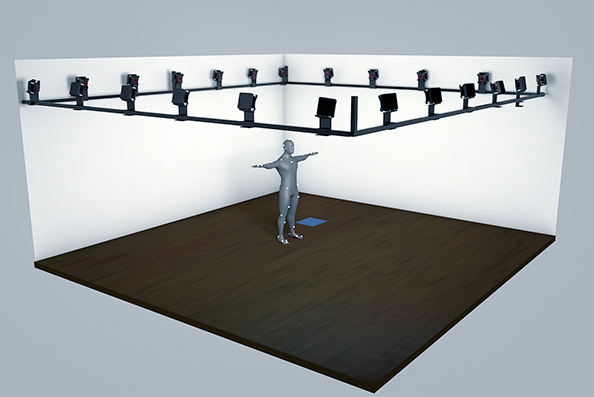
1. 固定所需摄像头,尽量每个摄像头均能覆盖运动空间,将摄像头各根网线统一接入到路由器(交换机)的lan口上,而Wlan接口则是接入连接路由与安装了motive软件的电脑的网线。
2.安装motive,注意需要联网下载directX-2009,同时不需要注册,直接将注册文件拷贝进相应文件夹即可,具体操作见《quickly start》文档。
3.标定相机,扫描活动区域,拟合活动空间。启动软件,会弹出一个弹窗,请你选择“打开已存在项目”还是“执行标定”等,选择perform the calibration。然后点击start wandering,此时需要手持标定杆,在视场内反复挥动,软件上的fps可以设置为240,exp250,THR200,LED2,采集点数达到10000以上,即可完成标定。亮度不要调节太高,容易反光造成干扰点。最后点击calculate,完成标定,exceptional为最好结果。
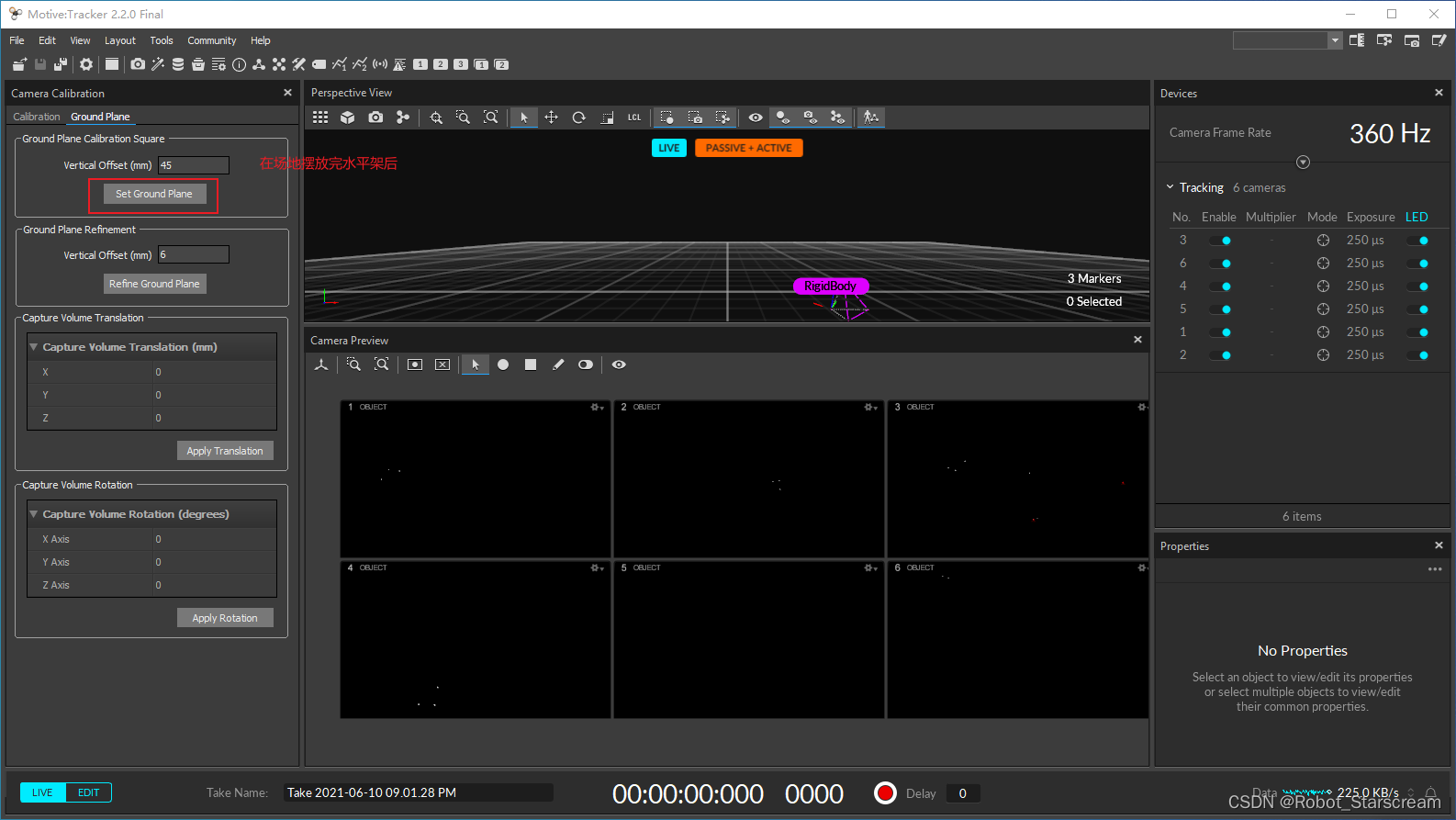
4.设置地平面。将三角形的标定板放置在平坦地面上,短轴为x正方向,长轴为z正方向,垂直为y轴正方向。点击set ground plane。
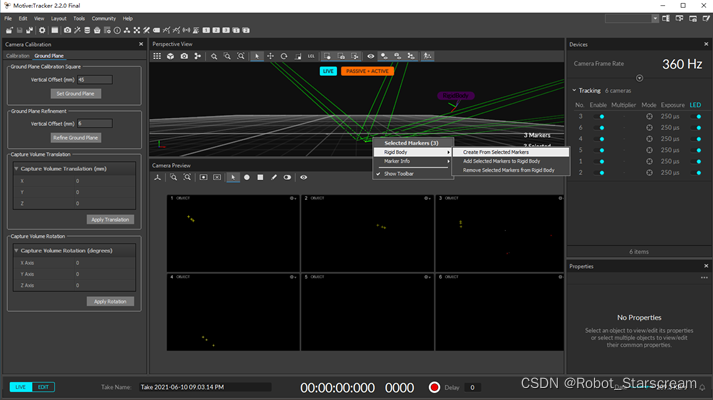
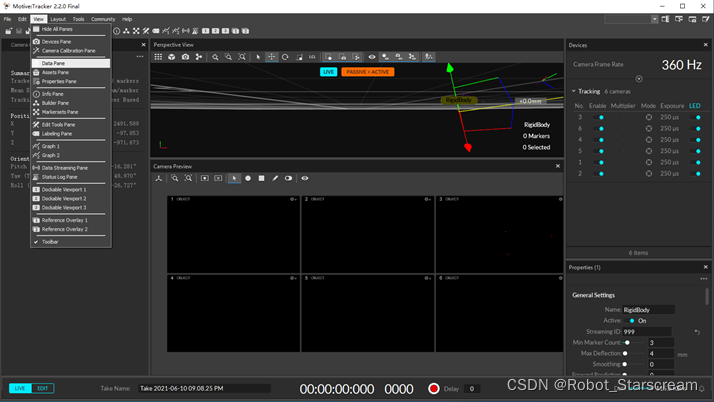
5.创建刚体,显示位姿信息。撤走标定板,在运动物体上贴上靶标点(尽量水平贴同时尽量防止遮挡),在软件中框选靶标点,右键create rigid body。在view中打开rigid body properties面板,选择real time info,即可显示刚体形心的位姿信息
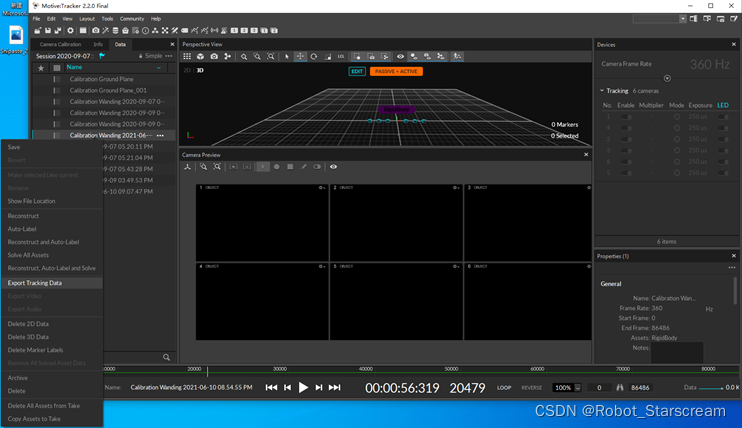
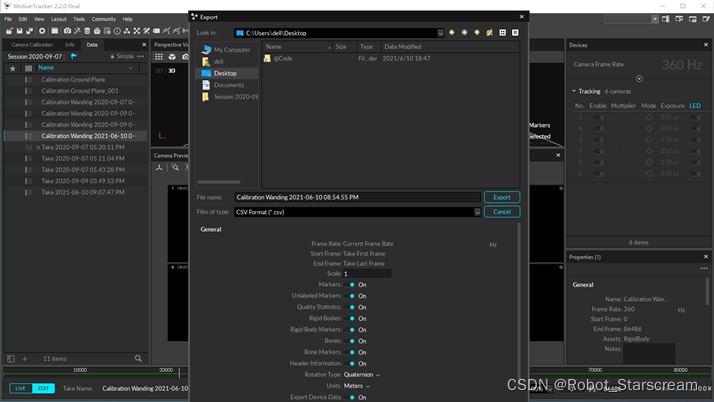
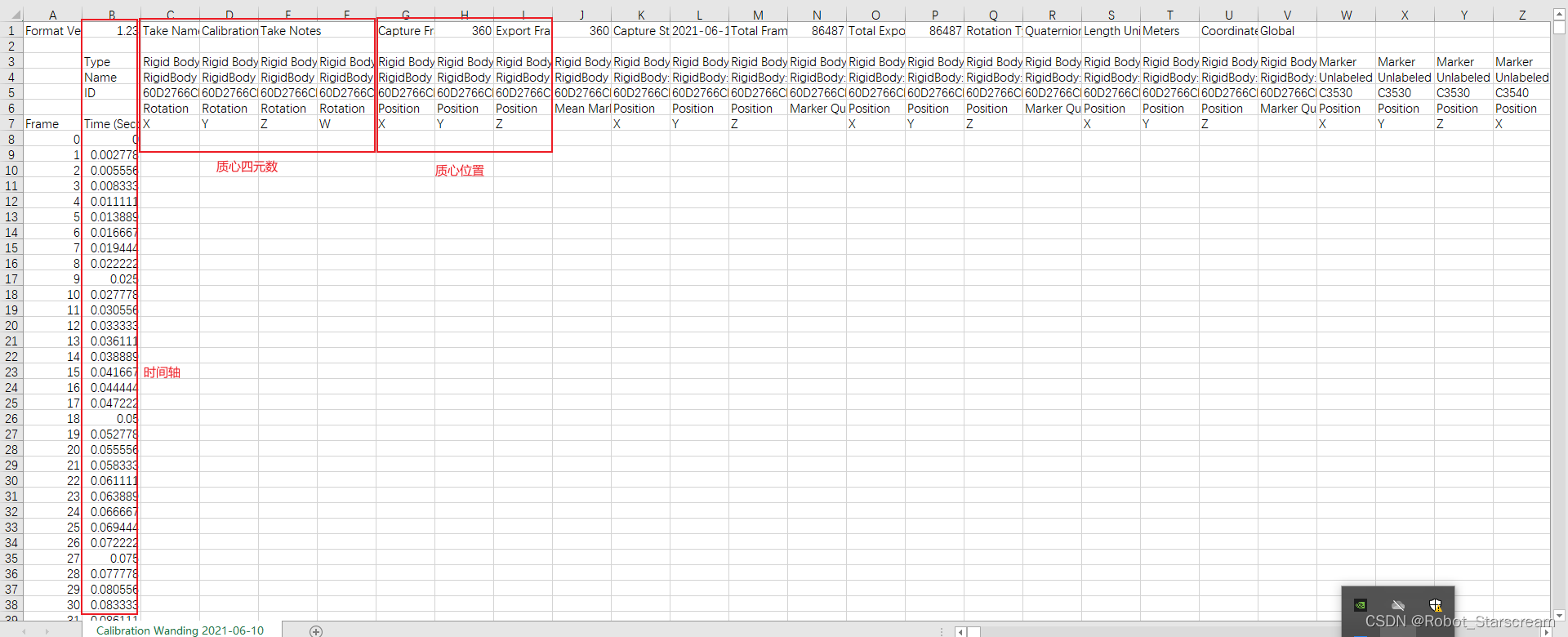
6. 数据的记录和导出。在layout中点击capture,在右下角有录制按钮,可以记录一段时间的数据。记录完成后可以在左侧project窗口内选中take 2018-03-22 xxx,右键选择export tracking data,选择csv格式的文件即可。
7.对于需要在控制中使用视觉数据的情况,需要打开data streaming窗口,选择broadcast frame data,在local Interface中选择XXX.XXX.XXX.XXX[camera]这个。需要说明的一点是,为减少设备数目,可以将控制程序和motive装在一台电脑上,此时通讯地址写成一样即可。
四. 视觉标定与数据处理图示过程
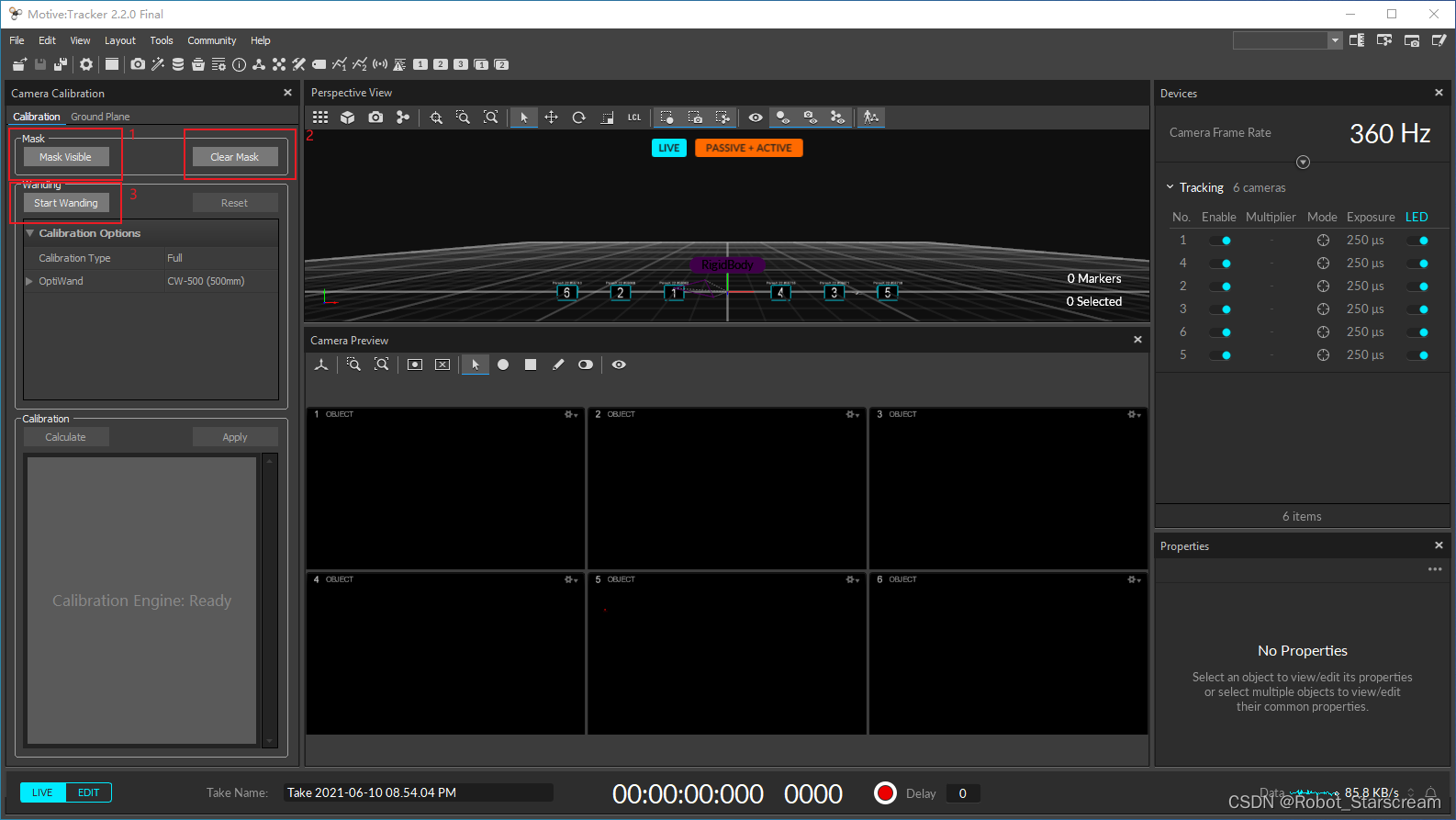
1.在标定前,先去除视场内的反光点(框1按钮),如果有误操作可清除涂抹(框2按钮),然后开始标定过程;
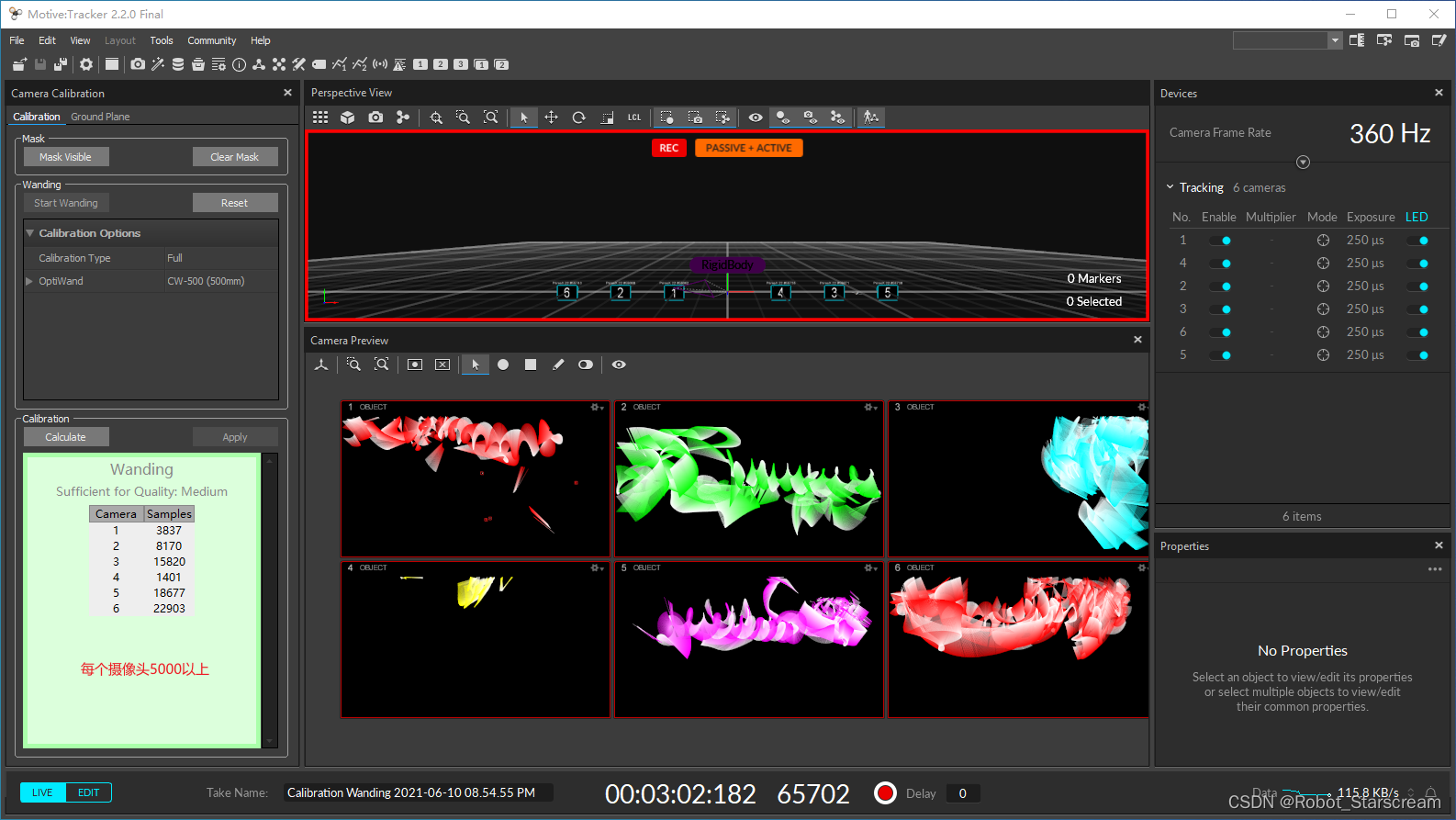
2. 每个摄像头的有效点数显示在下图左侧,视觉范围显示在下图右侧:
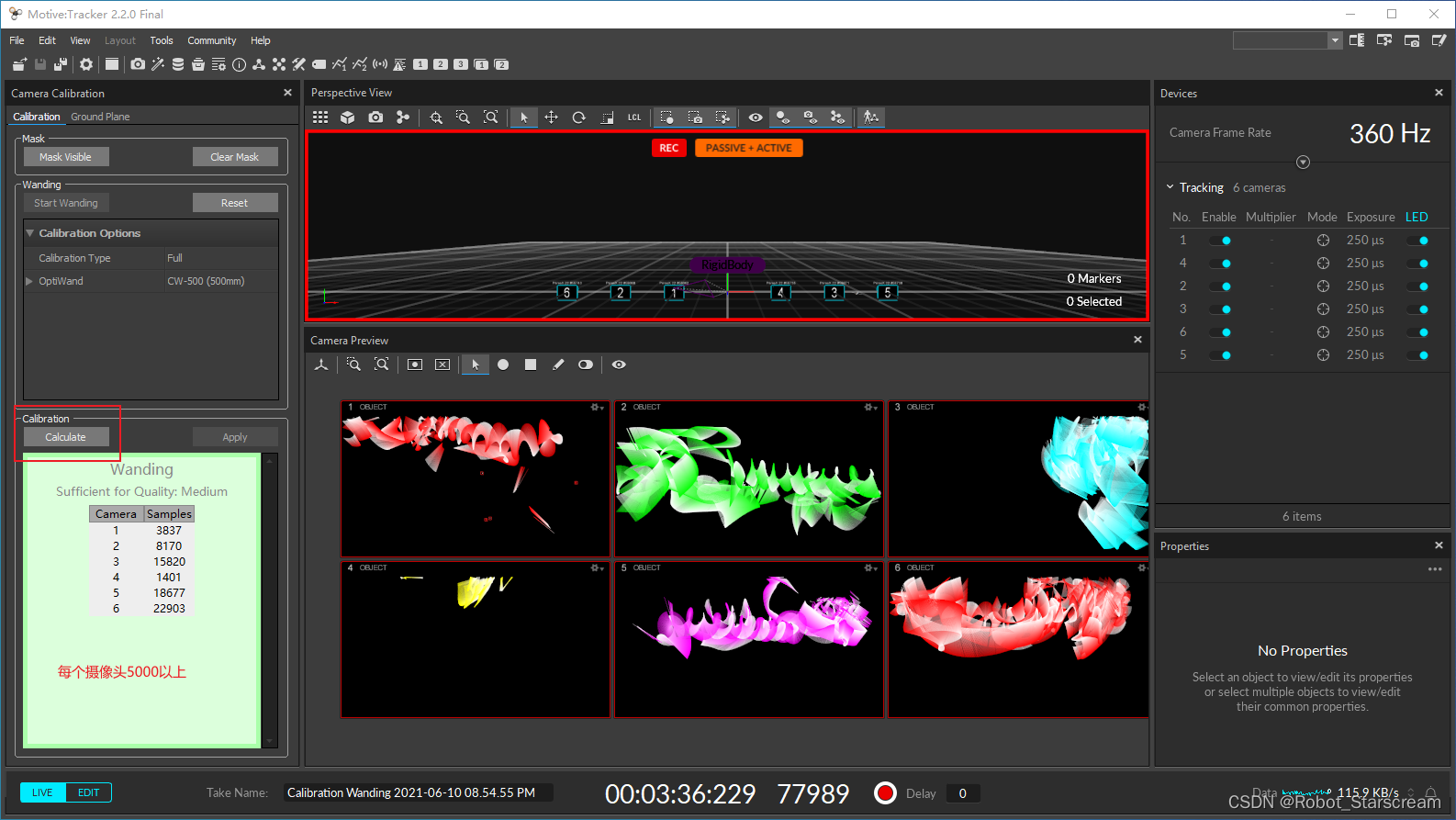
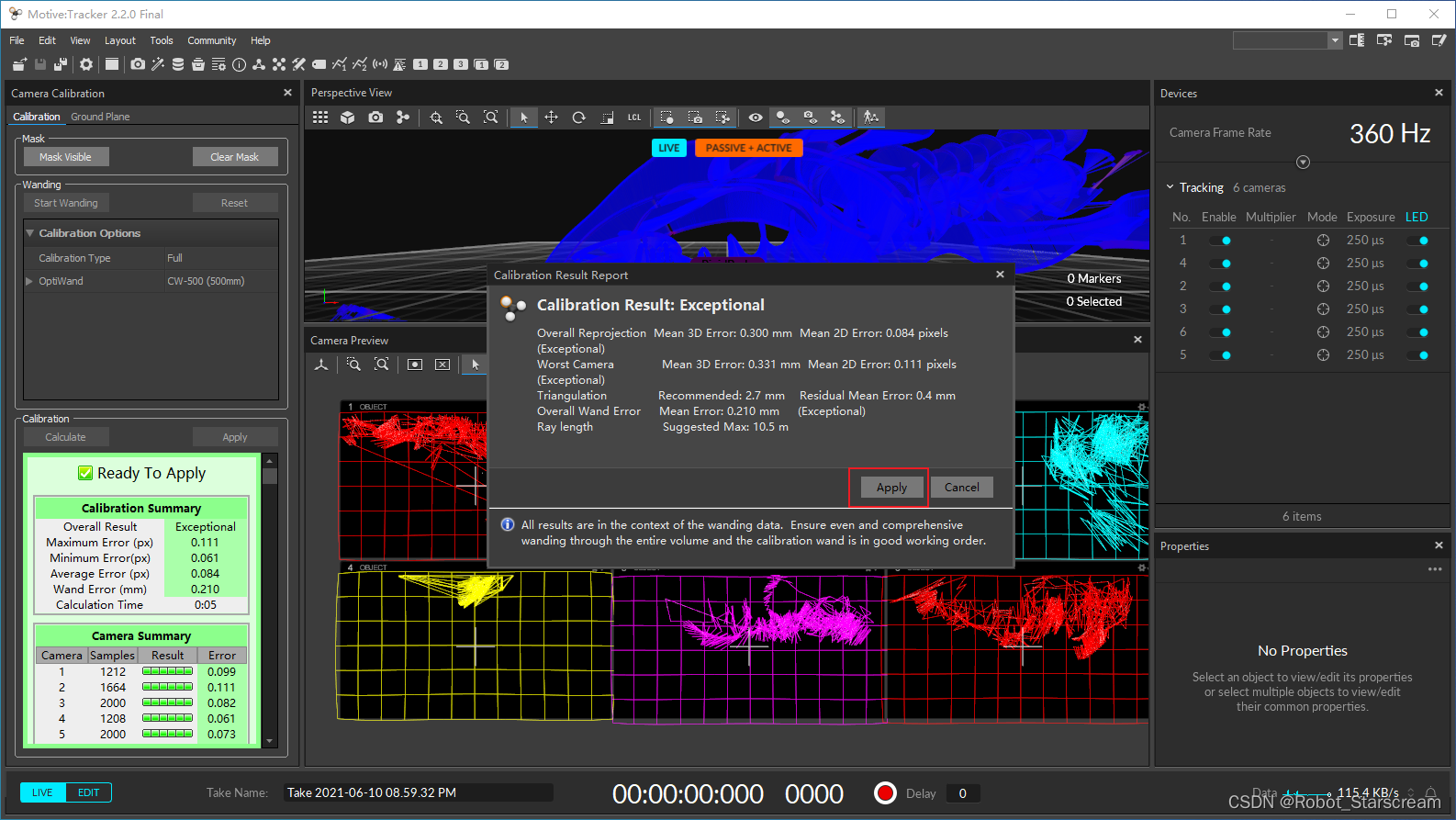
3. 当有效点数和视场满足需求后,点击计算 calculate;
4. 计算结果满足需求后,点击应用按钮apply;
5. 将三角标定杆置于视场后,设置视场内的水平度;
6. 将靶标点安置在机器人上,选中亮点即可创建刚体;
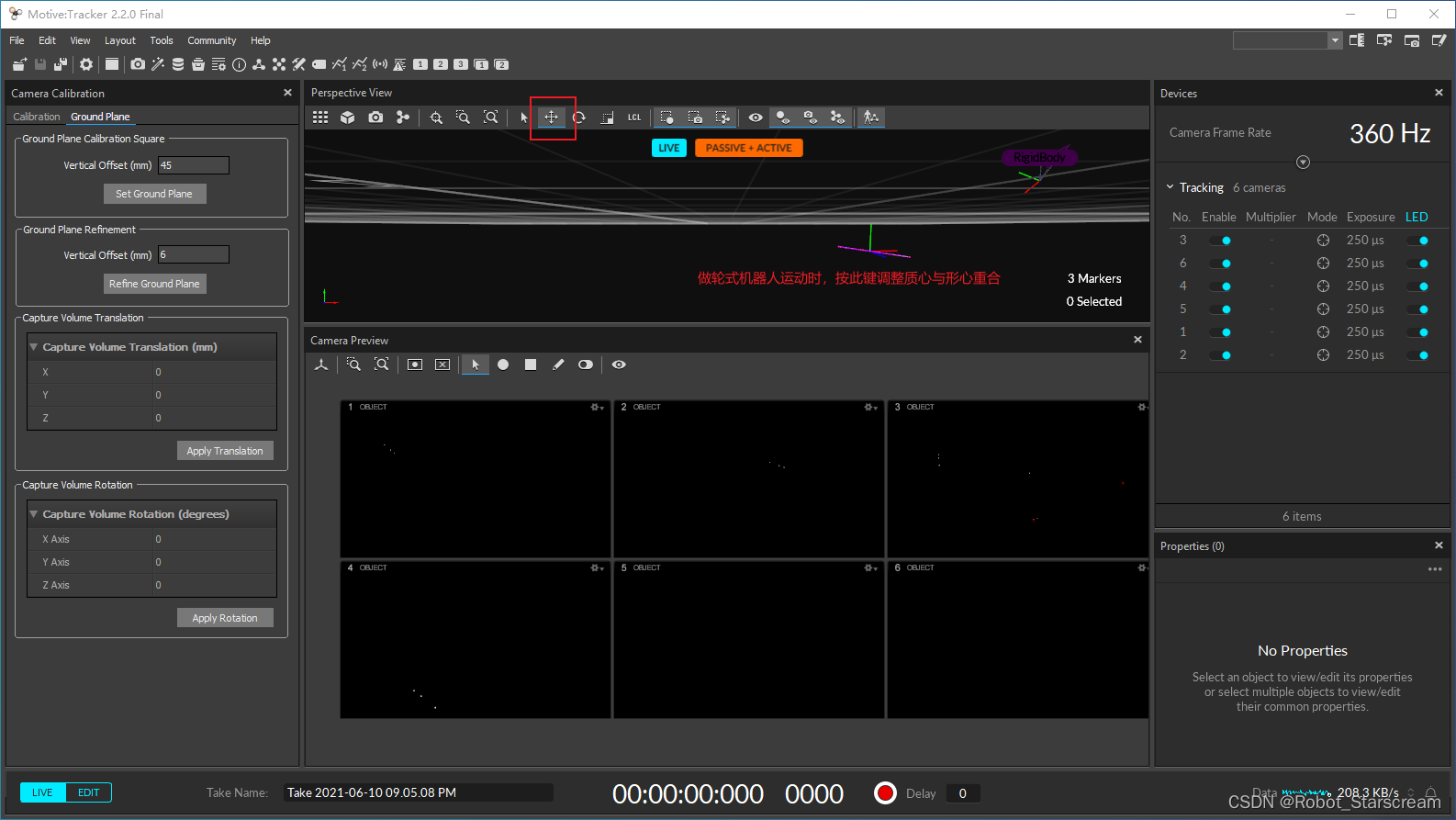
7. 如果是移动机器人,需要将机器人质心与形心重合;
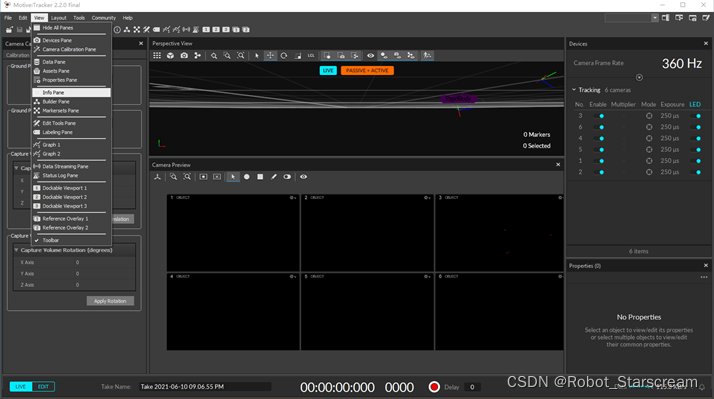
8. 查看刚体信息;
9. 按下方红色按钮开始记录数据,然后在Data Pane界面查看保存的数据;
10.将数据导出成CSV,方便二次处理;
11. CSV文档内容读取;
毕!



















 1866
1866

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











