







前言
- ROS2官方地址:https://docs.ros.org
- 载体系统:Ubuntu 20.04
安装流程
- 检查编码
locale
确保所用系统支持UTF-8编码,如果输出结果为支持UTF-8(如图所示),可直接进行下一步
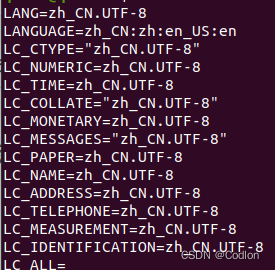
否则运行如下指令
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale # 重新确认
- 添加Ubuntu universe库
sudo apt install software-properties-common
sudo add-apt-repository universe
-
更改“下载自”为国内源(此处选择华为源)

-
添加ROS2秘钥以及库
sudo apt update && sudo apt install curl
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
此处会出现报错:ailed to connect to raw.githubusercontent.com port 443 after 13 ms: 拒绝连接
在/etc/hosts中加入一行,完整过程如下
- 打开目标文件/etc/hosts
sudo gedit /etc/hosts
- 添加第三行信息
127.0.0.1 localhost
127.0.1.1 iron-virtual-machine
185.199.108.133 raw.githubusercontent.com
- 开始安装ROS2
sudo apt update
sudo apt upgrade
sudo apt install ros-foxy-desktop python3-argcomplete
若在添加ROS2秘钥及库到执行安装ros-foxy-desktop步骤间隔时间过长,会导致报错:无法定位到ros-foxy-desktop软件包,此时重新执行添加ROS2秘钥及库
- 添加环境变量
echo " source /opt/ros/foxy/setup.bash" >> ~/.bashrc
source ~/.bashrc
- 验证ROS2是否安装成功
-
方案一: talker、listener例程
- 打开一个终端启动talker进程 source /opt/ros/foxy/setup.bash ros2 run demo_nodes_cpp talker - 再打开一个终端启动listener进程 source /opt/ros/foxy/setup.bash ros2 run demo_nodes_py listener -
方案二:小乌龟例程
- 打开一个终端启动小乌龟节点 ros2 run turtlesim turtlesim_node - 再打开一个终端启动小乌龟运动控制节点 ros2 run turtlesim turtle_teleop_key
-
ROS1与ROS2的共存切换
在.bashrc文件中添加一个切换选择语句如下:
- 打开文件
sudo gedit ~/.bashrc
- 在文件末尾添加如下代码:
# Select ROS1 or ROS2
echo "ROS1 noetic(1) or ROS2 foxy(2)?"
read edition
if [ "$edition" -eq "1" ];then
source /opt/ros/noetic/setup.bash
else
source /opt/ros/foxy/setup.bash
fi
每次启动终端时,输入1或者2来选择用ROS1还是ROS2
(此处参考知乎博主:铅笔永动机
参考文章链接:ROS系统 ROS1与ROS2共存使用切换方法 - 铅笔永动机的文章 - 知乎)
出现的问题
- 在完成 ROS1 与 ROS2 环境路径配置后,生效环境变量运行
source ~/.bashrc后出现问题:ROS_DISTRO was set to 'noetic' before. Please make sure that the environment does not mix paths from different distributions. - 问题点: .bashrc 文件中含有 ROS1 与 ROS2 两条路径
- 解决方法: 注释掉其中一个路径(使用 ROS1 就注释掉 ROS2,反之注释 ROS1),或者使用共存切换方法















 3676
3676











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









