







一、背景
上一篇博客我们已经为复现yolov8配置好了环境,如果前面的工作顺利进行,我们已经完成了90%(学习类程序最难的是环境配置)。
接下来将正式下载yolov8的相关代码,以及进行realsenseD435i相机+yolo v8的demo演示。
系统:ubuntu18.04
ROS:melodic
相机型号:Intel realsenseD435i
pytorch及python版本要求(上一篇博客已经完成):
Pip install the ultralytics package including all requirements in a Python>=3.8 environment with PyTorch>=1.8.
二、具体实验方法
1、三步法创建一个ROS工作空间:
mkdir -p ~/cat_ws/src
cd ~/cat_ws/src/
catkin_init_workspace
cd ..
catkin_make
2、下载yolo v8程序
a.激活conda环境
conda activate yolov8
b.安装以下依赖
pip install ultralytics
pip install rospkg
c.进入工作空间src文件夹,安装Yolov8_ROS
程序链接:https://github.com/qq44642754a/Yolov8_ros
cd cat_ws/src
git clone https://github.com/qq44642754a/Yolov8_ros.git
cd ..
catkin_make
至此,yolo v8已配置完成。
3、realsenseD435i相机+yolo v8联合运行demo
a.这里假设你已经安装了realsense驱动及realsense-ros,还没安装的可以参考我的博客ubuntu18.04安装Realsense D435i相机SDK及realsense-ros记录,为后期运行yolo v5作准备
b.详细运行realsenseD435i相机+yolo v8步骤:
#1.使用usb将realsenseD435i相机插入电脑
#2.打开终端,激活conda环境
conda activate yolov8
#3.进入工作空间运行yolov8命令,直到终端出现waiting for image.进行下一步
cd cat_ws/
source devel/setup.bash
roslaunch yolov8_ros yolo_v8.launch
#4.重新打开一个终端,打开相机程序
cd cat_ws/
source devel/setup.bash
roslaunch realsense2_camera rs_camera.launch

至此,就可看到yolov8的检测效果,如下图所示


三、遇到的问题
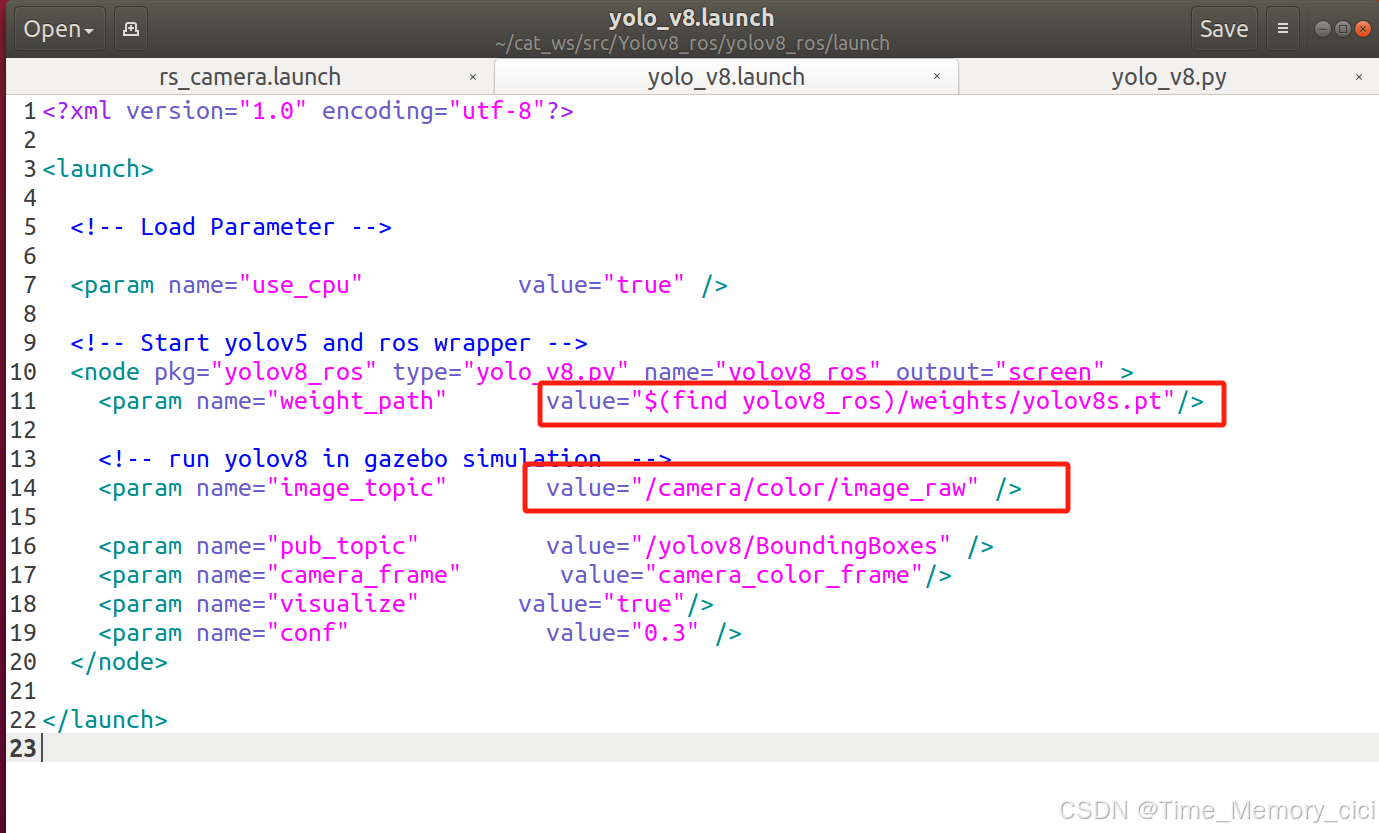
如果运行上述命令roslaunch realsense2_camera rs_camera.launch和roslaunch yolov8_ros yolo_v8.launch,不能出现yolo的识别框,则检查yolo v8.launch文件的两个地方
1、权重文件yolov8s.pt是否在weights文件夹下
2、话题中的color是否正确,如果是rgb则是在仿真环境下的话题,真实相机必须是color
完美~~~


















 1697
1697

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









