







目录
本文已经首发在个人微信公众号:工业机器人仿真与编程(微信号:IndRobSim),欢迎关注!
功能介绍
工业机器人的运动路径是由一个一个示教出来的点位组成的,在进行工件加工时,机器人的工具在每一个加工点位处都有一个特定的位置和姿态,为了验证工具在这些点位处的干涉情况以及机器人的可达性,通常仿真人员会使用一些辅助手段让焊枪或喷涂枪等工具模型在所有机器人示教点位处显示出来,这个过程就叫做插枪。而后,仿真人员会将这一系列显示出来的焊枪或喷涂枪等工具模型导出为一种可供设计人员查看的文件,这个过程称为导插枪文件。
大部分的机器人虚拟仿真软件,实现插枪以及导插枪文件功能都需要额外的插枪宏。而使用PDPS软件实现这个功能就简单多了,因为在Process Simulate软件中已经集成了这个命令,它就是“Gun Cloud”,也可以称为“焊枪云”。
生成插枪预览效果
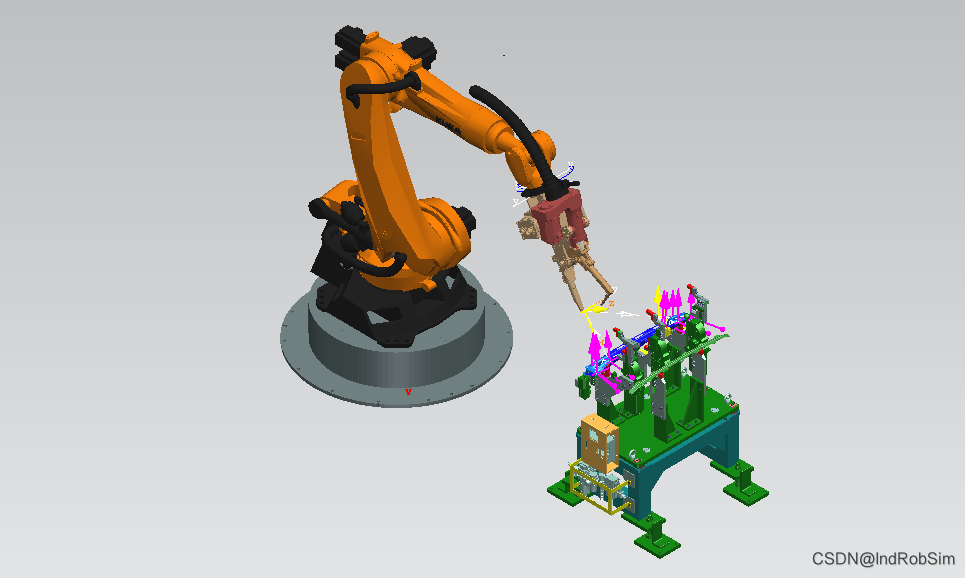
在Process Simulate软件中打开机器人虚拟仿真项目,并将焊枪以及机器人在运动过程中与周边有可能发生干涉的设备全部激活显示。
在软件“Process”菜单栏下的“Discrete”命令组中点击“Gun Cloud”![]() 命令按钮,弹出Gun Cloud对话框。
命令按钮,弹出Gun Cloud对话框。
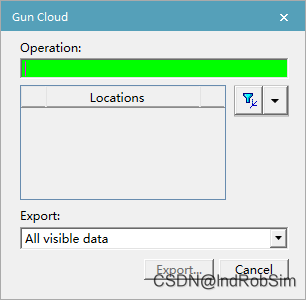
左侧的操作浏览树Operation Tree中选择要插枪的机器人示教程序,Gun Cloud对话框中Operation下的显示框内显示已选择的机器人示教程序,Locations列表中显示已选择的机器人示教程序包含的所有示教点位。同时在软件工作区机器人的每一个示教点位处都显示出一把焊枪模型,焊枪模型的当前位姿就是机器人运动到此点位时焊枪工具的位姿。
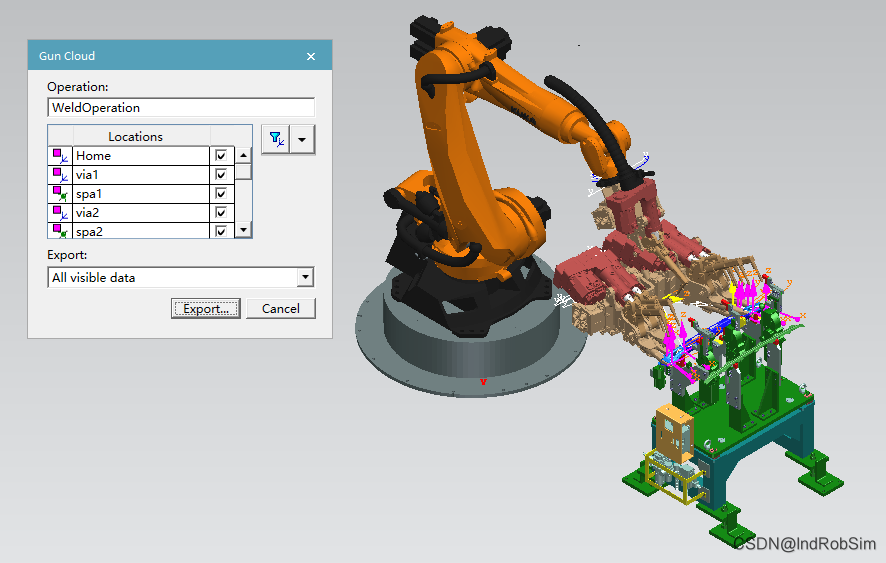
在Locations列表中,可以通过在示教点位名称后“勾选”或取消“勾选”来精确的决定在此点位处是否显示插枪模型。如果机器人示教点位较多,也可以点击“Filter by Type”![]() 按钮,在其下拉菜单中按照示教点位的类型来筛选要显示的插枪点,可选的点位类型有Via locations(过渡点)、Weld locations(焊接点)、Seam locations(连续点)。
按钮,在其下拉菜单中按照示教点位的类型来筛选要显示的插枪点,可选的点位类型有Via locations(过渡点)、Weld locations(焊接点)、Seam locations(连续点)。
Export下的下拉框中可以指定要导出的插枪模型包含的图形元素,同时在软件工作区也会同步更新显示选定的插枪模型,包含以下四个选项:
All visible data:所有可见模型均显示。
Assigned parts and guns:只显示指定的工件和焊枪模型。
Visible parts and guns:可见的工件和焊枪均显示。
Guns only:仅显示焊枪模型。
值得注意的是,每次在Gun Cloud对话框中参数修改后,软件工作区中的机器人、焊枪、工件等模型也会实时更新。
导出插枪文件
Gun Cloud对话框中的插枪参数全部设置完成后,点击“Export…”按钮,弹出Export JT对话框,在此对话框中可以设置插枪模型导出为JT文件的相关参数。
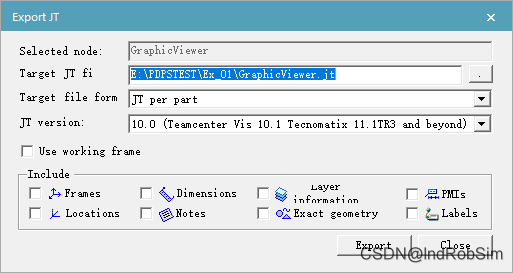
Selected node:显示要导出的JT格式插枪文件名称,默认情况下自动设定为GraphicViewer。
Target JT file:指定要导出的JT格式插枪文件存储目录,默认情况下设定为仿真项目文件根目录。
Target file format:设置要导出的JT格式插枪文件保存形式,包括JT per part(每个部分)和JT monolithic(单个文件)两种形式可选。
JT version:设置要导出的JT格式插枪文件兼容的PDPS软件最低版本。
Use working frame:勾选此选项后,JT格式插枪文件将以工作坐标系为参考方向导出,默认情况下以世界坐标系为参考方向导出。
Include:指定要导出的JT格式插枪文件包含的附加信息,可选项包括Frames、Locations、Dimensions、Notes、Layer Information、Exact Geometry、PMIs、Labels。
一般情况下,会将Target file format的参数设置为JT monolithic,即将插枪模型以单个JT文件的形式导出,其他参数可酌情设置。
全部设置完成后,点击“Export”按钮,稍等片刻,JT格式文件导出完成后弹出“插枪模型导出完成,是否要打开导出日志文件?”的对话框。点击“是”,则打开日志;点击“否”,则不打开日志。
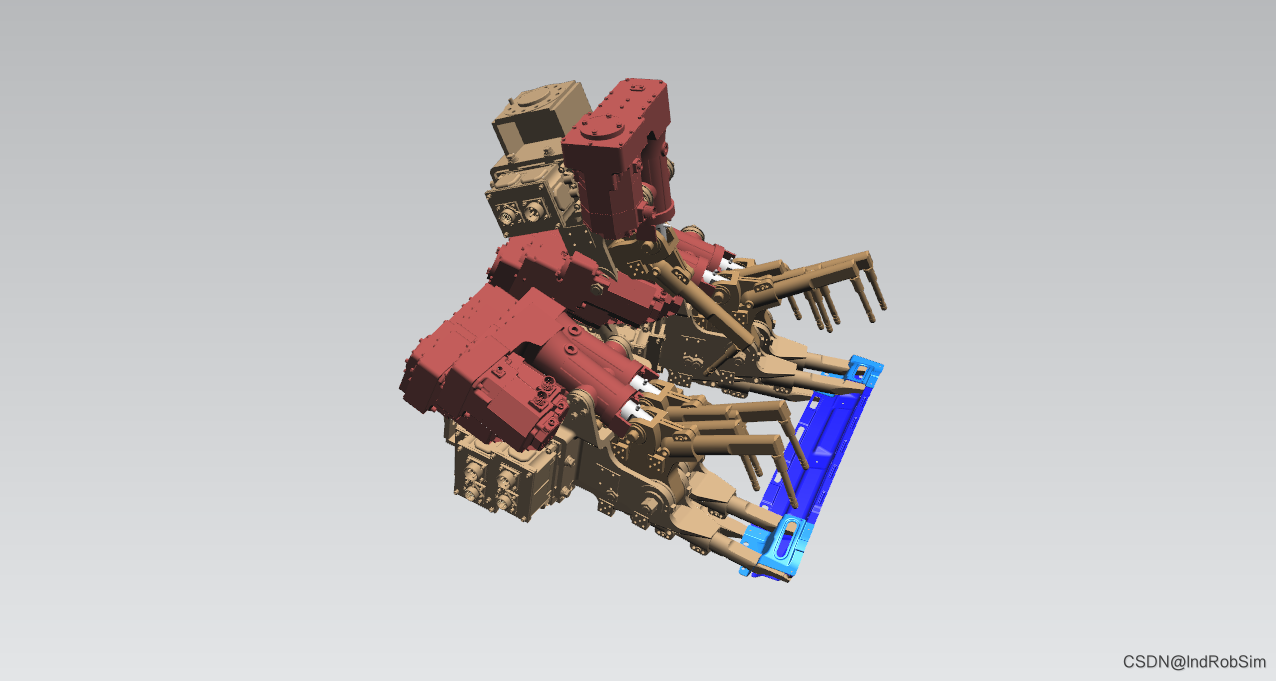
插枪文件查看
在仿真项目根目录中,找到带有GraphicViewer字样的JT格式文件,使用JT2Go软件或NX软件就可以打开并查看导出的插枪模型了。
The End



















 8045
8045

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











