






cartographer
需要全手工编译……比较麻烦。
如果使用新版ceres-solver,版本2.x,需要修改源码,部分“接口代码”有改动。
稳妥使用ceres-solver-1.13.0,且需要安装abseil-cpp。
验证是否成功,使用roscd或roslaunch,查看一下是否有对于功能包:

map

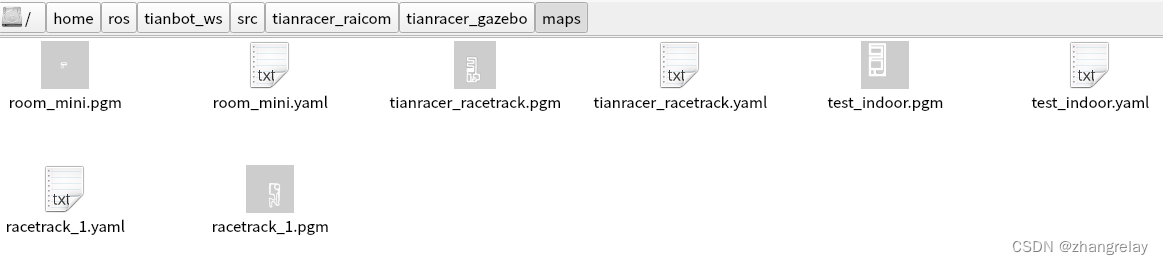
只有room_mini和tianracer_racetrack.pgm提供了“原装”地图。

没有提供地图的world需要建图之后才能更好的导航,或者选用行为式控制器,而非路径算法类规划器。跑圈算法可分为有地图和无地图两种:
- 有地图-需要SLAM了……/(ㄒoㄒ)/~~
- 无地图-后续有空再写
/(ㄒoㄒ)/~~
此处省略……
原版参数:
image: room_mini.pgm
resolution: 0.050000
origin: [-50.000000, -50.000000, 0.000000]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.196image: tianracer_racetrack.pgm
resolution: 0.025000
origin: [-12.200000, -12.500000, 0.0000000]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.196新环境均为大图,参考tianracer_racetrack.yaml参数。


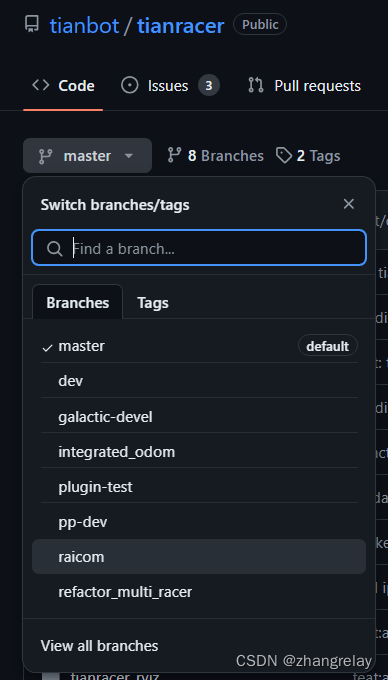
源码地址:
要注意使用raicom分支。
过往学习笔记:
ROS机器人虚拟仿真挑战赛学习笔记_无人车竞速仿真-CSDN博客
SLAM
为了使用ROS Racecar仿真更好地建立SLAM地图以用于导航,可以按照以下步骤进行:
- 准备工作:
- 确保已经正确安装了ROS和相关的依赖包。
- 创建一个ROS工作空间,并下载或编写所需的Racecar仿真代码。
- 启动仿真环境:
- 设置环境变量,确保ROS环境能够正确运行。
- 使用
roslaunch命令启动Racecar的仿真环境。
- 启动SLAM建图:
- 在仿真环境中,启动SLAM算法(如gmapping)来构建地图。这通常涉及运行一个SLAM节点,该节点将使用激光雷达(或其他传感器)数据来创建环境的2D地图。
- 同时,启动rviz(ROS Visualization)来可视化建图过程。
- 控制车辆进行建图:
- 通过键盘控制或其他控制方式(如遥控器、游戏手柄等)手动驾驶Racecar在仿真环境中移动。
- 确保车辆遍历整个环境,以便SLAM算法能够捕捉到所有必要的特征并构建完整的地图。
- 保存和优化地图:
- 当车辆遍历完整个环境后,停止SLAM建图过程,并保存生成的地图文件。
- 可以使用地图优化工具(如map_server的
map_saver节点)来保存和优化地图,以提高其质量和准确性。
- 验证和使用地图:
- 加载保存的地图到导航系统中,并进行测试以验证其准确性和可用性。
- 如果地图质量不佳或存在错误,可以重复上述步骤进行修正和优化。
- 注意事项:
- 在建图过程中,确保仿真环境的设置与实际环境相匹配,包括传感器配置、障碍物布局等。
- 调整SLAM算法的参数以适应不同的环境和传感器特性,以获得最佳的建图效果。
- 定期更新和维护地图,以适应环境中的变化。
通过以上步骤,你可以更好地在ROS Racecar仿真中建立SLAM地图,并将其用于导航任务。
当提到建图算法时,虽然Gmapping在某些情况下可能表现不够理想,但确实存在其他更先进的建图算法可供选择。以下是一些推荐的建图算法,它们在不同的环境和应用场景下具有出色的性能:
- Cartographer:
- 特点:基于图优化的激光SLAM算法,能够生成高质量的二维和三维地图。
- 优势:通过扫描匹配(scan-matching)和子图(submaps)的概念,Cartographer能够在实时性和准确性之间取得良好的平衡。它适用于各种室内和室外环境,并且具有较低的计算资源需求。
- 应用场景:广泛应用于机器人导航、无人驾驶等领域。
- Hector SLAM:
- 特点:一种适用于激光扫描仪的SLAM算法,它基于高斯-牛顿法解决scan-matching问题。
- 优势:Hector SLAM不需要依赖里程计数据,因此在某些没有准确里程计信息的应用场景中表现出色。它使用多分辨率地图来避免局部最小解,并提高建图精度。
- 注意事项:对传感器噪声和机器人速度有一定要求,需要在相对静态和特征丰富的环境中进行建图。
- ORB-SLAM:
- 特点:一种基于视觉的SLAM算法,使用ORB(Oriented FAST and Rotated BRIEF)特征点进行定位和建图。
- 优势:ORB-SLAM能够在室内外环境中工作,并且具有较高的鲁棒性和准确性。它支持单目、双目和RGB-D相机,并且支持回环检测和重定位功能。
- 应用场景:适用于需要视觉信息的导航和定位任务。
- LSD-SLAM:
- 特点:一种直接法的视觉SLAM算法,基于半稠密地图表示。
- 优势:LSD-SLAM能够在光照变化较大的环境中工作,并且能够处理动态物体。它生成的地图包含丰富的几何信息,适用于需要高精度导航的应用场景。
- 注意事项:计算资源需求较高,实时性可能受到一定影响。
- DSO(Direct Sparse Odometry):
- 特点:一种基于稀疏直接法的视觉里程计算法,它直接对图像像素进行操作,不需要特征点提取和描述子匹配。
- 优势:DSO具有较高的鲁棒性和准确性,能够在纹理较少或光照变化较大的环境中工作。它适用于高速运动和动态环境下的视觉定位。
- 应用场景:无人机、自动驾驶汽车等需要高速、准确视觉定位的应用场景。
总结:
在选择建图算法时,需要根据具体的应用场景和需求进行权衡。对于需要高精度定位和导航的应用场景,Cartographer和ORB-SLAM是不错的选择。对于没有准确里程计信息或需要处理动态物体的场景,Hector SLAM和LSD-SLAM可能更适合。而对于需要高速、准确视觉定位的应用场景,DSO可能是一个更好的选择。同时,还需要考虑计算资源的需求和实时性的要求。
















 1247
1247











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











