







惯性导航误差传播分析
为什么要做惯导误差传播分析
1.微分方程离散化也会或多或少带来一些误差,但是这个误差,在我们建立误差模型和进行误差分析时不考虑;原因主要包括:1.分析模型太复杂;2.我们在进行离散化求解微分方程的前提就是,由计算带来的误差要远小于传感器本身的误差,因此,这样一个远小于的量,在误差分析时可以忽略;我们只考虑传感器和初识条件的误差

2.研究惯导的基本原理时将INS看成是一个没有误差的理想系统。实际的惯性传感器的输出、所用重力值及编排算法均存在误差,导致INS解算的导航参数(如位置、速度和姿态)均含有误差。
3.分析INS中不同误差源对导航结果的影响,评估惯性导航精度﹔惯导误差随时间而变,用微分方程来描述其随时间的传递关系;构建组合导航卡尔曼滤波的系统状态方程。
惯导误差微分方程的推导
误差来源
1.传感器误差(陀螺和加表的零偏,比例因子等)
2.初始(上一步)导航状态误差
3.重力误差、算法和计算误差(离散化、截断误差)
目标
惯性导航的误差微分方程
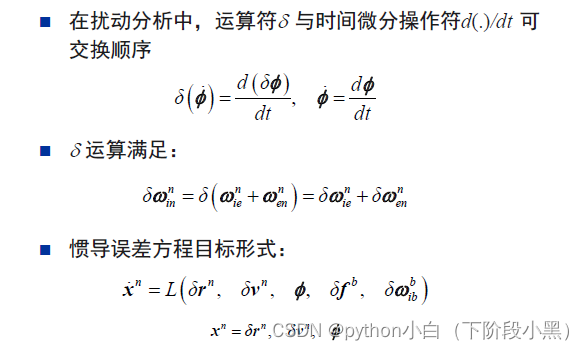
方法:扰动分析(Perturbation Analysis)
1.实际变量表示成真值与扰动误差(小量)之和。对惯导微分方程中的变量进行误差扰动,展开取至一阶小量(忽略二阶小量)
2.误差扰动分析方法等效于方程围绕变量真值进行泰勒展开,取至一阶项,实现非线性方程的线性化
扰动分析
本质上是对一个函数在真值上进行泰勒展开,取一阶项,也就是线性化的过程。
从下面的误差方程的目标形式中我们可以看出,误差微分方程右边允许包含陀螺误差、加速度计的误差、以及导航状态误差本身
误差方程基础
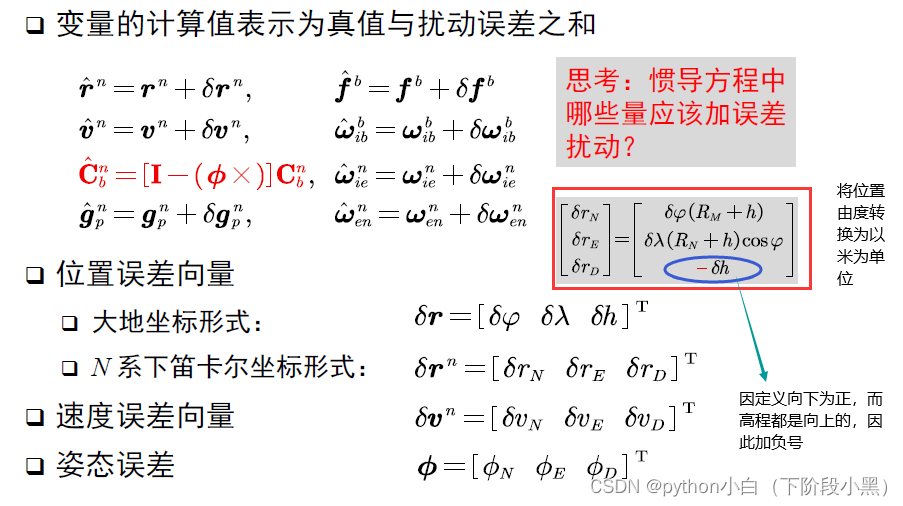
除上述项必须加扰动外,推算过程中,不是所有的项都必须加扰动误差
常用变量的误差扰动式
推导过程就是列出式子,然后将两边真值部分消除掉,得到的就是扰动误差项了
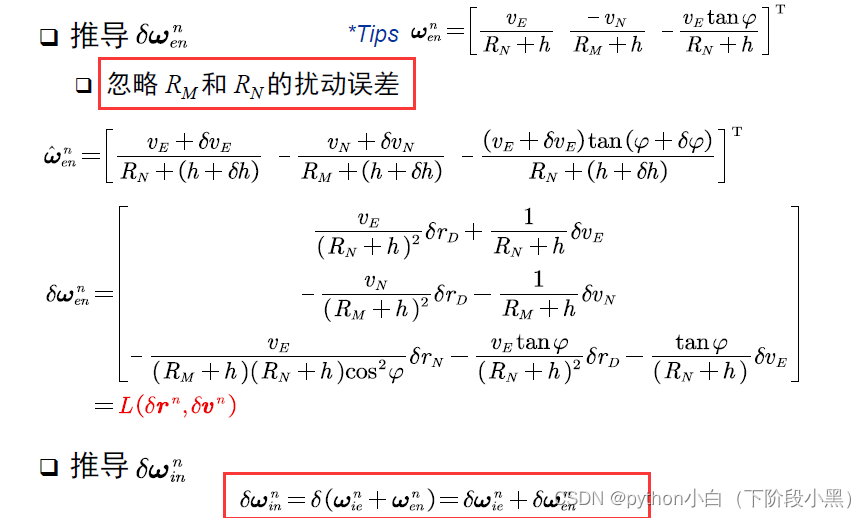
推导地球自转角速度扰动误差项
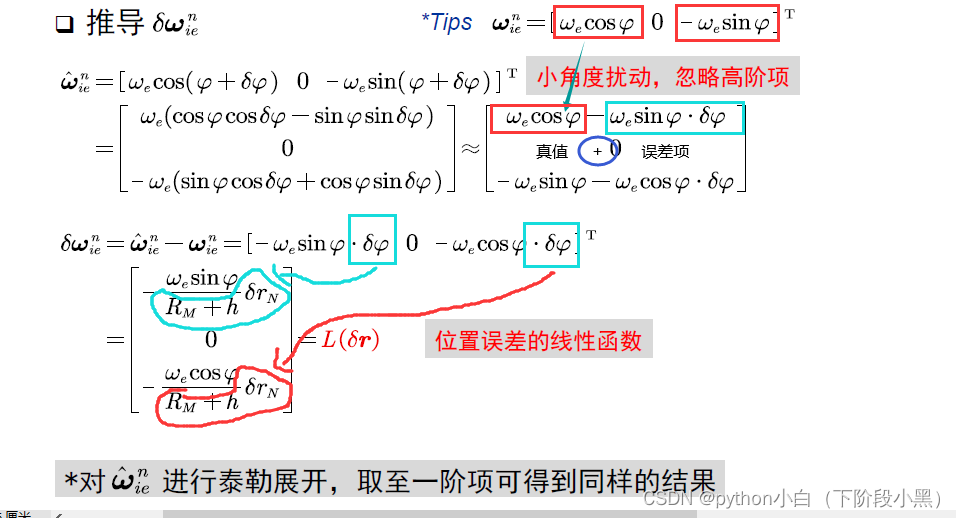
由上图结果可知,地球自转角速度在n系下投影的误差只与北向位置误差有关系
泰勒展开方法如下图
推导牵连角速度扰动误差项
推导重力的扰动误差
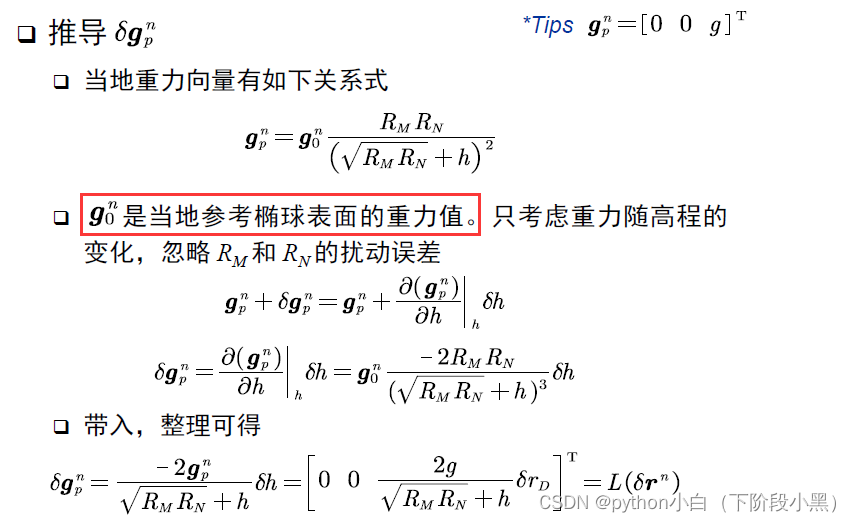
提示:上一层楼重力变化大约是一个毫伽


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











