







17.2 项目介绍
项目旨在提供一个完整的自动驾驶系统仿真与训练平台,使用户能够模拟不同驾驶场景、训练自动驾驶智能体,以及评估其性能。这对于研究自动驾驶算法、开发自动驾驶系统,以及测试各种自动驾驶方案都具有重要意义。
17.2.1 功能介绍
本项目是一个自动驾驶系统的模拟与训练框架,其主要功能概括如下:
- 模拟自动驾驶环境:项目使用Carla仿真器,提供了一个高度可配置的自动驾驶环境,包括不同路线、天气条件、摄像头设置等,以模拟真实世界的道路驾驶情境。
- 数据收集与生成:项目提供了数据收集脚本(collect_expert_data.py)用于在仿真环境中收集驾驶数据,以及数据生成脚本(generate_autoencoder_data.py)用于生成训练自动编码器所需的数据。
- 特征提取模型训练:使用深度学习模型(Autoencoder、AutoencoderSEM或VAE)训练用于提取车辆摄像头图像的特征,这些特征可用于后续的驾驶智能体训练。
- 驾驶智能体训练:提供了DDPG(Deep Deterministic Policy Gradient)智能体训练框架,用于训练自动驾驶智能体,该智能体能够根据环境状态选择动作以控制车辆。
- 智能体性能测试:提供了测试脚本(test_agent.py)用于评估已经训练好的自动驾驶智能体的性能,包括回报、成功率等。
- 超参数配置和设置灵活性:项目中使用配置文件(configuration.py)来配置各种超参数和设置,从而实现了对训练和测试过程的高度灵活性。
- 可扩展性:框架具有可扩展性,可以在不同的仿真环境和场景下进行训练和测试,以适应多种自动驾驶任务。
17.2.2 模块结构
本项目的功能强大,可以将整个项目划分为如图17-1所示的模块结构。
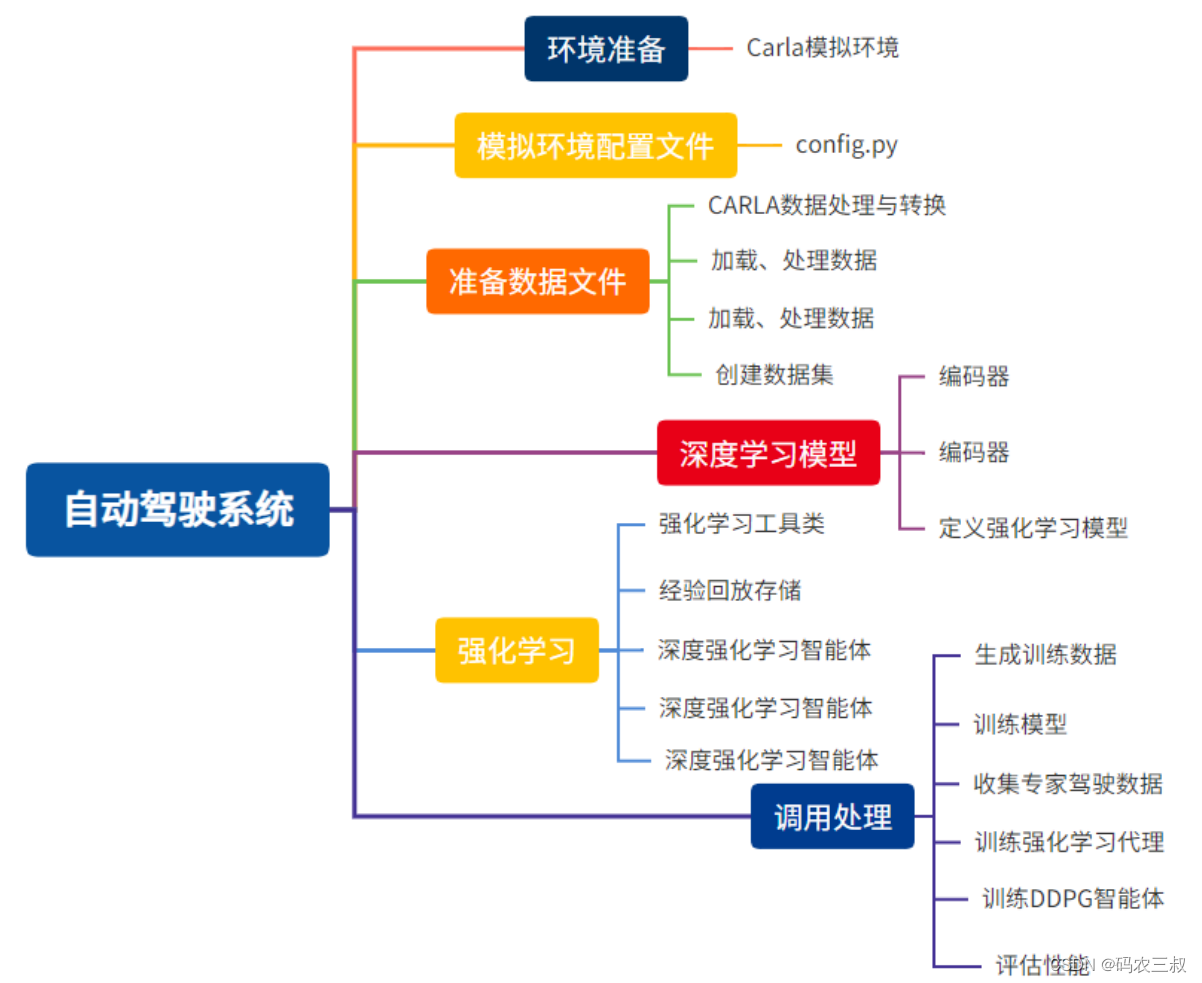
图17-1 模块结构

















 1080
1080

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











