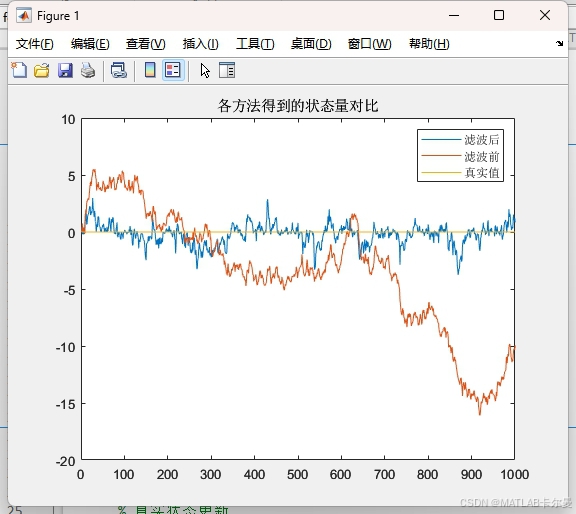
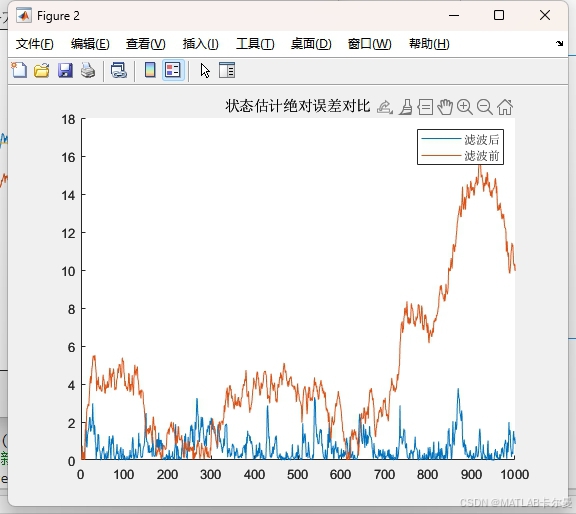
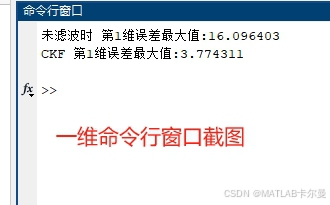
本文所述的代码实现了n维自适应容积卡尔曼滤波算法,支持动态调整状态和观测维度(通过参数dim配置),适用于高维非线性系统的状态估计。代码通过球面径向准则生成容积点,避免了雅可比矩阵线性化需求,显著提升了高维场景下的滤波精度与稳定性 订阅专栏后,可查看完整的代码,可复制粘贴,粘贴到MATLAB空脚本中即可直接运行 文章目录 变维度演示 MATLAB源代码 程序介绍 算法原理与核心创新 代码结构与核心模块 功能特性与优势 应用场景示例 扩展方向 变维度演示 当维度为1时: 当维度为3时:









 订阅专栏 解锁全文
订阅专栏 解锁全文


















 372
372

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








