







Disturbance invariant set
I think one may get stuck at computation of what paper [1] called "disturbance invariant set". The disturbance invariant set is an infinite Minkowski addition Z = W ⨁ Ak*W ⨁ Ak^2*W..., where ⨁ denotes Minkowski addition. Obtaining this analytically is impossible, and then, what comes ones' mind first may be an approximation of that by truncation: Z_approx = W ⨁ Ak*W...⨁ Ak^n*W. This approximation, however, leads to Z_approx ⊂ Z, which means Z_approx is not disturbance invariant. So, we must multiply it by some parameter alpha and get Z_approx = alpha*(W ⨁ Ak*W...⨁ Ak^n*W) so that Z ⊂ Z_approx is guaranteed. (see example/DisturbanceLinearSystem.m for this implementation). The order of truncation and alpha are tuning parameters, and I chose values that are large enough. But, if you want to choose them in a more sophisticated way, paper [3] will be useful. Also, example/example_dist_inv_set.m may help you understand how disturbance the invariant set works.
主函数(example_dist_inv_set.m):
function test
% addpath('../src/')
% addpath('../src/utils/')
% specify your own discrete linear system
A = [1 1; 0 1];
B = [0.5; 1];
Q = diag([1, 1]);
R = 0.1;
% construct a convex set of system noise (2dim here)
W_vertex = [0.15, 0.85; 0.15, -0.85; -0.15, -0.15; -0.15, 0.15];
W = Polyhedron(W_vertex);
% construct disturbance Linear system
% note that disturbance invariant set Z is computed and stored as member variable in the constructor.
disturbance_system = DisturbanceLinearSystem(A, B, Q, R, W);
[K_tmp, obj.P] = dlqr(A, B, Q, R)
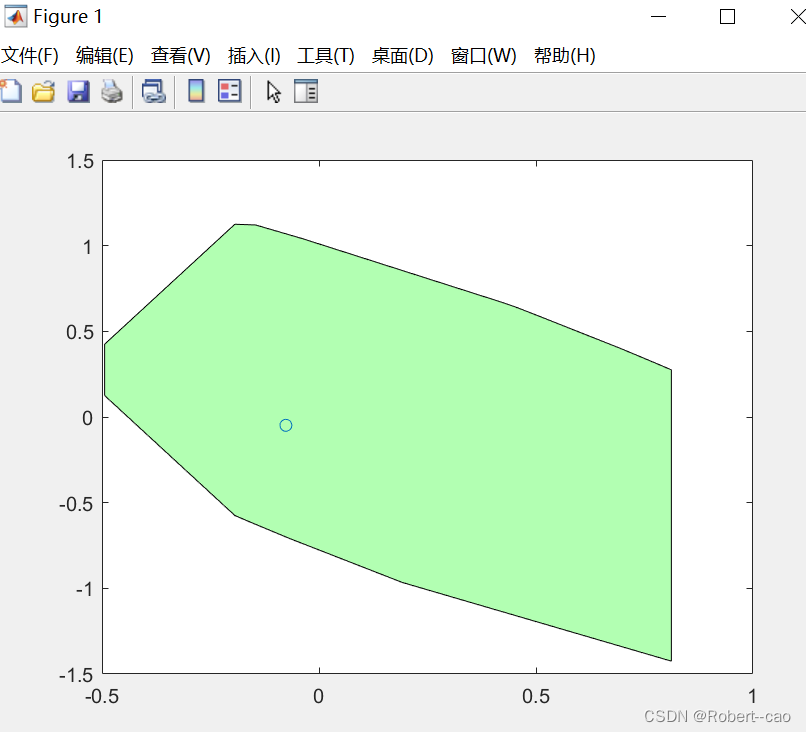
% you can see that with any disturbance bounded by W, the state is guaranteed to inside Z
x = zeros(2); % initial state
for i = 1:50
u = -K_tmp * (x - 0);
x = disturbance_system.propagate(x, u); % disturbance is considered inside the method
clf;
Graphics.show_convex(disturbance_system.Z, 'g', 'FaceAlpha', .3); % show Z
scatter(x(1, :), x(2, :)); % show particle
pause(0.01);
end
end
调用函数(DisturbanceLinearSystem.m):
classdef DisturbanceLinearSystem < handle
properties (SetAccess = private)
W % convex set of distrubance
Z % disturbance invariant set
% common notation for linear system
A; B; % dynamics x[k+1] = A*x[k]+B*u[k]
nx; nu; % dim of state space and input space
Q; R; % quadratic stage cost for LQR
K; % LQR feedback coefficient vector: u=Kx
P; % optimal cost function of LQR is x'*P*x
Ak %: A + BK closed loop dynamics
end
methods (Access = public)
function obj = DisturbanceLinearSystem(A, B, Q, R, W)
% obj = obj@LinearSystem(A, B, Q, R);
obj.A = A;
obj.B = B;
obj.Q = Q;
obj.R = R;
obj.nx = size(A, 1);
obj.nu = size(B, 2);
[K_tmp, obj.P] = dlqr(obj.A, obj.B, obj.Q, obj.R);
obj.K = -K_tmp;
obj.Ak = (obj.A+obj.B*obj.K);
obj.W = W;
obj.Z = obj.compute_mrpi_set(1e-4);
end
function x_new = propagate(obj, x, u)
w = obj.pick_random_disturbance();
x_new = obj.A * x + obj.B * u + w;
end
end
methods (Access = public)
function w = pick_random_disturbance(obj)
% pick disturbance form uniform distribution
verts = obj.W.V;
b_max = max(verts)';
b_min = min(verts)';
% generate random until it will be inside of W
while true
w = rand(obj.nx, 1) .* (b_max - b_min) + b_min;
if obj.W.contains(w)
break
end
end
end
function Fs = compute_mrpi_set(obj, epsilon)
% Computes an invariant approximation of the minimal robust positively
% invariant set for
% x^{+} = Ax + w with w \in W
% according to Algorithm 1 in 'Invariant approximations of
% the minimal robust positively invariant set' by Rakovic et al.
% Requires a matrix A, a Polytope W, and a tolerance 'epsilon'.
[nx,~] = size(obj.Ak);
s = 0;
alpha = 1000;
Ms = 1000;
E = eye(nx);
it = 0;
while(alpha > epsilon/(epsilon + Ms))
s = s+1;
alpha = max(obj.W.support(obj.Ak^s*(obj.W.A)')./obj.W.b);
mss = zeros(2*nx,1);
for i = 1:s
mss = mss+obj.W.support([obj.Ak^i, -obj.Ak^i]);
end
Ms = max(mss);
it = it+1;
end
Fs = obj.W;
for i =1:s-1
Fs = Fs+obj.Ak^i*obj.W;
end
Fs = (1/(1-alpha))*Fs;
end
end
end结果:
参考资料:
[1] Langson, Wilbur, et al. "Robust model predictive control using tubes." Automatica 40.1 (2004): 125-133.
[2] Mayne, David Q., María M. Seron, and S. V. Raković. "Robust model predictive control of constrained linear systems with bounded disturbances." Automatica 41.2 (2005): 219-224.
[3] Rakovic, Sasa V., et al. "Invariant approximations of the minimal robust positively invariant set." IEEE Transactions on Automatic Control 50.3 (2005): 406-410.
GitHub - HiroIshida/robust-tube-mpc: Robust model predictive control using tube















 3851
3851











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









