






The Double Sphere Camera Model
Vision-based motion estimation and 3D reconstruction, which have numerous applications (e.g., autonomous driving, navigation systems for airborne devices and augmented reality) are receiving significant research attention. To increase the accuracy and robustness, several researchers have recently demonstrated the benefit of using large fieldof-view cameras for such applications.基于视觉的运动估计和3D重建因具有多种应用(例如,自动驾驶,用于机载设备和增强现实的导航系统),而正在受到重要的研究关注。为了提高准确性和稳健性,一些研究人员最近证明了使用大视场相机进行此类应用的好处。
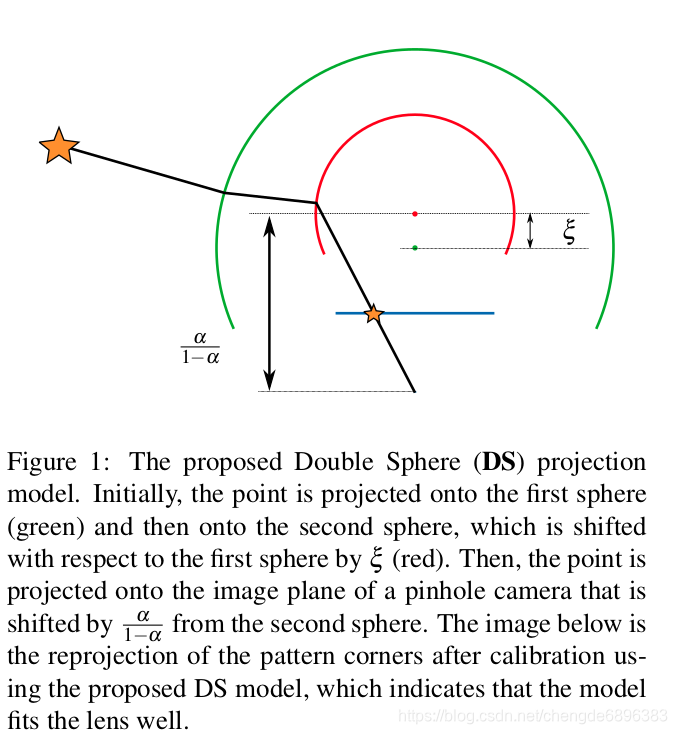
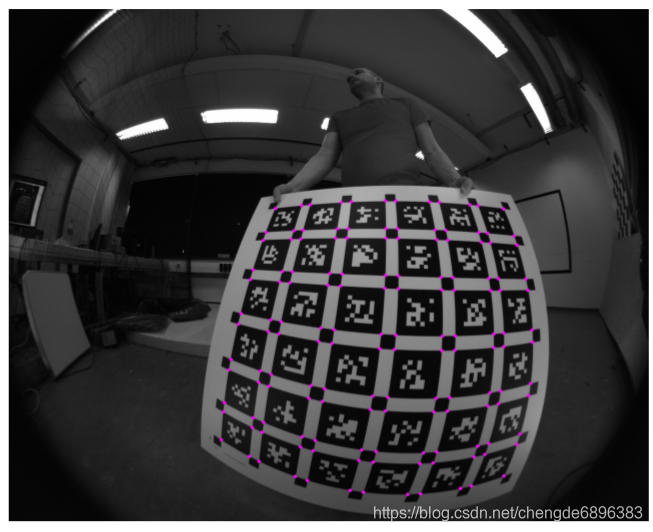
In this paper, we provide an extensive review of existing models for large field-of-view cameras. For each model we provide projection and unprojection functions and the subspace of points that result in valid projection. Then, we propose the Double Sphere camera model that well fits with large field-of-view lenses, is computationally inexpensive and has a closed-form inverse. We evaluate the model using a calibration dataset with several different lenses and compare the models using the metrics that are relevant for Visual Odometry, i.e., reprojection error, as well as computation time for projection and unprojection functions and their Jacobians. We also provide qualitative results and discuss the performance of all models.
在本文中,我们对大型视场相机的现有模型进行了广泛的回顾。对于每个模型,我们提供投影和非投影函数以及导致有效投影的点的子空间。然后,我们提出双球相机模型,它非常适合大视场镜头,计算成本低,并且具有封闭形式的反转。我们使用具有多个不同镜头的校准数据集来评估模型,并使用与视觉测距相关的度量(即重投影误差)以及投影和非投影函数及其雅可比行列式的计算时间来比较模型。我们还提供定性结果并讨论所有模型的性能。
1. Introduction
Visual Odometry and Simultaneous Localization and Mapping are becoming important for numerous applications. To increase the accuracy and robustness of these methods, both hardware and software must be improved.
Several issues can be addressed by the use of large field-of-view cameras. First, with a large field-of-view, it is easier to capture more textured regions in the environment, which is required for stable vision-based motion estimation. Second, with a large field-of-view, large camera motions can be mapped to smaller pixel motions compared to cameras with a smaller field-of-view at the same resolution. This ensures small optical flow between consecutive frames, which is particularly beneficial for direct methods.
Previous studies have demonstrated that a large field-of-view is beneficial for vision-based motion estimation [14][11]. Catadioptric cameras are mechanically complex and expensive; however fisheye lenses are small, lightweight,and widely available on the consumer market. Thus, in this paper we focus on fisheye lenses and models that describe their projection.
视觉里程计和同时定位和导航对于众多应用来说变得越来越重要。为了提高这些方法的准确性和稳健性,必须改进硬件和软件。
使用大视场相机可以解决几个问题。首先,对于大视场,更容易捕获环境中更多纹理区域,这是稳定的基于视觉的运动估计所需的。其次,对于具有大视场的大相机运动,与具有相同分辨率的较小视场的相机相比,可以将较大的相机运动映射到较小的像素运动。这确保了连续帧之间的小光流,这对于直接方法特别有利。
以前的研究表明,大视场有利于基于视觉的运动估计[14] [11]。折反射相机机械复杂且昂贵; 然而,鱼眼镜头体积小,重量轻,可在消费市场上广泛使用。因此,在本文中,我们专注于鱼眼镜头和描述其投影的模型。
The reminder of this paper is organized as follows. In Section 2 we provide an extensive review of camera models that can be used with fisheye lenses. To make the paper selfcontained we provide the projection and unprojection functions and define the subspace of valid projections for each model. In Section 3, we propose a novel projection model for fisheye cameras that has the following advantages.
• The proposed projection model is well suited to represent the distortions of fisheye lenses.
• The proposed model does not require computationally expensive trigonometric operations for projection and unprojection.
• Differing from projection models based on higher order polynomials [6] [12], that use iterative methods to unproject points, the inverse of the projection function exists in a closed form.
本文的提醒组织如下。在第2节中,我们对可与鱼眼镜头一起使用的相机型号进行了广泛的回顾。为了使纸张自包含,我们提供投影和非投影函数,并为每个模型定义有效投影的子空间。在第3节中,我们提出了一种用于鱼眼相机的新型投影模型,具有以下优点。
• 提出的投影模型非常适合表示鱼眼镜头的扭曲。
• 所提出的模型不需要计算上昂贵的三角运算用于投影和非投影。
• 与基于高阶多项式的投影模型不同[6] [12],使用迭代方法来取消投影点,投影函数的逆矩阵以闭合形式存在。
In Section 5, we evaluate all presented models with respect to metrics that are relevant for vision-based motion estimation. Here, we use a dataset collected using several different lenses to evaluate the reprojection error for each model. We also present the computation time required for projection and unprojection functions and the time required to compute Jacobians relative to their arguments. The datasets used in this study together with the open- source implementation of the proposed model are available on the project page:
https://vision.in.tum.de/research/vslam/double-sphere
在第5节中,我们针对与基于视觉的运动估计相关的度量评估所有呈现的模型。在这里,我们使用使用几种不同镜头收集的数据集来评估每种模型的重投影误差。我们还提供了投影和非投影函数所需的计算时间以及相对于其参数计算雅可比行列式所需的时间。本项研究中使用的数据集以及所提出模型的开源实现可在项目页面上找到:

















 921
921

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









