






机械臂启动操作顺序
roslaunch ur_modern_driver ur10e_bringup.launch robot_ip:=192.168.1.214
roslaunch ur10_e_moveit_config ur10_e_moveit_planning_execution.launch
roslaunch ur10_e_moveit_config moveit_rviz.launch config:=true
手眼标定主要参考
注意输入rqt_image_view,打开相机预览
遇到的问题
一
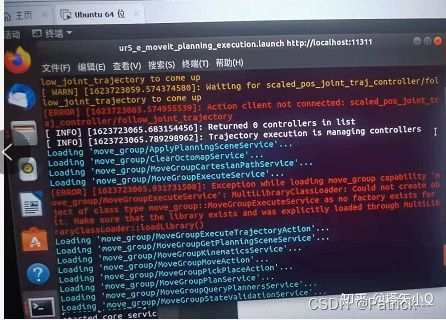
报错:Exception while loading move_group capability ‘move_group/MoveGroupExecuteTrajectoryAction’: According to the loaded plugin descriptions the class move_group/MoveGroupExecuteTrajectoryAction with base class type move_group::MoveGroupCapability does not exist. Declared types are move_group/ApplyPlanningSceneService move_group/ClearOctomapService move_group/MoveGroupCartesianPathService move_group/MoveGroupExecuteService move_group/MoveGroupGetPlanningSceneService move_group/MoveGroupKinematicsService move_group/MoveGroupMoveAction move_group/MoveGroupPickPlaceAction move_group/MoveGroupPlanService move_group/MoveGroupQueryPlannersService move_group/MoveGroupStateValidationService
Available capabilities: move_group/ApplyPlanningSceneService, move_group/ClearOctomapService, move_group/MoveGroupCartesianPathService, move_group/MoveGroupExecuteService, move_group/MoveGroupGetPlanningSceneService, move_group/MoveGroupKinematicsService, move_group/MoveGroupMoveAction, move_group/MoveGroupPickPlaceAction, move_group/MoveGroupPlanService, move_group/MoveGroupQueryPlannersService, move_group/MoveGroupStateValidationService
解决方法:
找到move_group添加move_group/MoveGroupExecuteTrajectoryAction
删除move_group/MoveGroupKinematicsService,改成如下情况即可
二
弹出三个窗口,当点击check staring pose时,一直报错,并不能显示0/17,而是一直显示0/1。
如果出现错误提示:Can't calibrate from this position!
可以修改目录easy_handeye/easy_handeye/src/easy_handeye中的python脚本handeye_robot.py
将函数_check_target_poses(self, joint_limits)定义中的下面两行注释掉即可
# if len(plan.joint_trajectory.points) == 0 or CalibrationMovements._is_crazy_plan(plan, joint_limits):
# return False

三
问题描述:
很多时候进行点击check starting pose或者take sample会出现闪退现象,此时查看错误信息,可能机械臂的姿态不对,不能进行初始化
解决办法:
将机械臂回零点以后,再运行标定程序,打开三个窗口,然后再将机械臂拖动到想要标定的Kinect的视野中去。














 1464
1464











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









