







2025.3.17补充:标准DH法和改进DH法的区别
一、标准DH法与改进DH法的区别(2025.3.17更新)
参考博文:机器人运动学建模_dh法建立连杆坐标系-CSDN博客
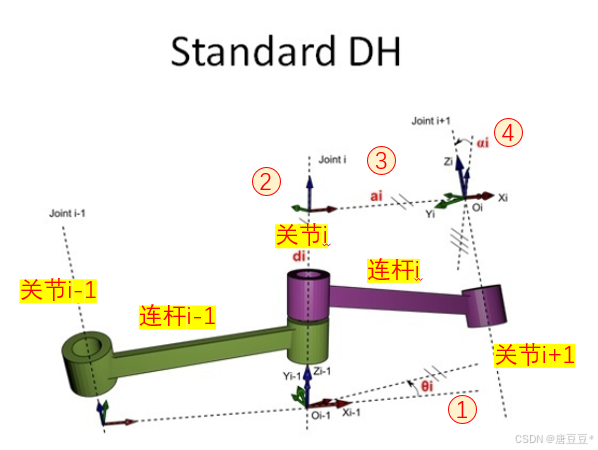
1.标准DH法
==> 坐标系{i}
建立在关节i+1
处,也就是连杆
i的远端
==> 关节i
的转轴是Z(i-1)
==>
从坐标系{i-1}
到坐标系{i}
的变换关系
:

==>齐次变换矩阵:

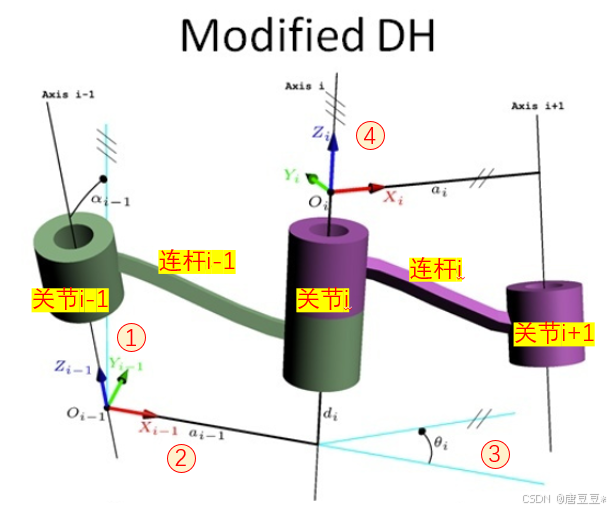
2.改进DH法
==> 坐标系{i}
建立在关节i
处,也就是连杆
i的近端
==> 关节i
的转轴是Z(i)
==>
从坐标系{i-1}
到坐标系{i}
的变换关系:

==>齐次变换矩阵:

以下是用的改进DH法:
二、建立DH坐标系(改进DH法)
1.确定Zi轴:
关节轴Zi 坐标系 {i} 的Z轴(转动轴或移动轴)
2.确定原点Oi:
公垂线ai与关节轴i的交点
示例: 如下图所示,坐标系{i-1}的原点是zi-1与zi的公垂线与zi-1的交点
3.确定Xi轴:
Xi沿公垂线 ai 由关节 i 指向关节i+1
示例:如下图所示,Xi-1的方向是沿着公垂线ai-1由关节i-1指向关节i

三、DH坐标系建立实例(改进DH法)
1.找Z轴
以下所有关节全部为转动关节,则对应的Z轴就是各关节的转动轴

2.找原点:涵盖了两个z轴相交、平行、异面等情况的原点确定方法
Zi轴与Zi+1相交,则交点为原点Oi
Zi轴与Zi+1平行,则原点Oi一般使得di=0
异面时,原点Oi 为公垂线 ai 与关节轴 Zi 的交点

3.找X轴:涵盖了两个z轴相交、平行、异面等情况的X轴确定方法
Zi与Zi+1相交,则Xi为Zi与Zi+1的叉乘
Zi与Zi+1平行或异面,Xi的方向为沿公垂线ai由Zi指向Zi+1

四、确定DH参数(改进DH法)
1.DH参数
•α(i-1)
(
连杆转角
)
:绕X(i-1) 轴
,从Z(i-1) 旋转
到Zi
的角度。
•a(i-1)
(
连杆长度
):
沿X(i-1) 轴
,从Z(i-1)
移动到Zi
的距离。
•di
(
关节偏移
):
沿Zi
轴,从X(i-1)
移动到Xi
的距离。
•θi
(
关节角度
):
绕Zi 轴
,从X(i-1) 旋转
到Xi
的角度。
注:以下图为例,变换顺序如下:
先从坐标系{i-1}——变换α(i-1)得到坐标系{R}——变换a(i-1)得到坐标系{Q}——变换θi得到坐标系{P}——变换di得到坐标系{i}

2.齐次变换矩阵


3.示例的DH参数

五、python代码实现(6自由度机械臂)
1.建立一个六自由度机械臂的类函数
class RobotClass:
def __init__(self, name, num_joints, count_type, joint_limits=None):
self.name = name
self.num_joints = num_joints
# 关节限位,格式[(最小值,最大值)]
self.joint_limits = joint_limits if joint_limits is not None else [(0,0)] * num_joints
self.joint_angles = [0] * num_joints
self.a = [0, 0, 220, 90, 0, 0]
self.alpha = [0, np.pi/2, 0, np.pi/2, -np.pi/2, np.pi/2]
self.d = [0, 0, 0, 174, 0, 0]
def self_joint_angles(self, angles):
if len(angles) != self.num_joints:
print(f"需要提供{self.num_joints}个关节角度, 但提供了{len(angles)}个。" ) # 关节数目过少报错
for i, angle in enumerate(angles):
if i == 2:
self.joint_angles[i] = angle+np.pi/2
else:
if i == 3:
self.joint_angles[i] = angle-np.pi/2
else:
self.joint_angles[i] = angle
if angle < self.joint_limits[i][0] or angle > self.joint_limits[i][1]:
print(f"关节{i+1}的角度{angle}超出了范围{self.joint_limits[i]}。" )
def get_joint_angles(self):
return self.joint_angles
def dh_matrix(self, theta, d, a, alpha):
# 根据dh参数计算单个关节的变换矩阵
return np.array([
[np.cos(theta), -np.sin(theta), 0, a],
[np.sin(theta)*np.cos(alpha), np.cos(theta)*np.cos(alpha), -np.sin(alpha), -d*np.sin(alpha)],
[np.sin(theta)*np.sin(alpha), np.cos(theta)*np.sin(alpha), np.cos(alpha), d*np.cos(alpha)],
[0, 0, 0, 1]
])
def _ste_(self):
return (f"机器人名称:{self.name}\n"
f"关节数量:{self.num_joints}\n"
f"关节角度:{self.joint_gangles}\n"
f"关节范围:{self.joint_limits}")2.正运动学函数
# 正运动学
def forward_kinematics(self, angles):
T = np.eye(4)
TList = []
self.self_joint_angles(angles)
for i in range(self.num_joints):
theta = self.joint_angles[i]
a = self.a[i]
d = self.d[i]
alpha = self.alpha[i]
T = np.dot(T, self.dh_matrix(theta, d, a, alpha)) # 矩阵乘法,计算各坐标系对基座的齐次变换矩阵
TList.append(T)
return TList3. 主函数调用相应的类函数及正运动学函数
import numpy as np
from robot_class import RobotClass # 导入类
from kinematic_function import forward_kinematics # 导入正运动学方程
if __name__ == '__main__':
joint_limits = [(-2*np.pi, 2*np.pi), (-np.pi, 0), (0, np.pi), (-2*np.pi, 2*np.pi), (-np.pi/2, np.pi/2), (-2*np.pi, 2*np.pi)]
robot = RobotClass(name="SunShine robot", num_joints=6, count_type=1, joint_limits=joint_limits)
joint_angles = [0, -np.pi/2, 0, np.pi, 0, 0]
T_matrix = forward_kinematics(robot, joint_angles)
















 7万+
7万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









