







旋转关节机器人
四个参数:a,α,d,θ
四个参数实际上是两组,先有a,α,再有d,θ。
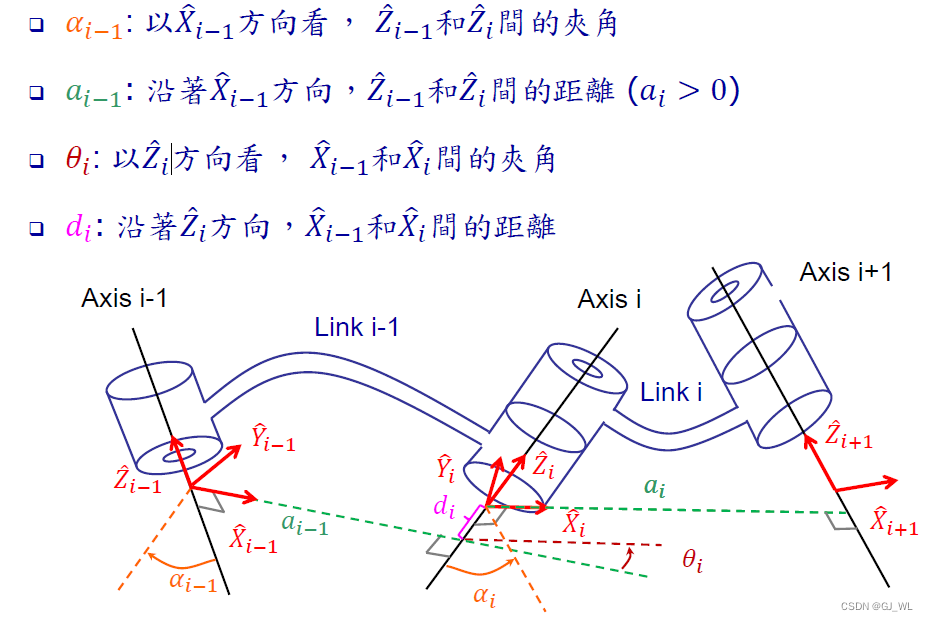
a是两个转轴之间的距离(Z轴),异面直线公垂线的长度,也就是连杆的长度,对于旋转关节是固定值
α是两个转轴之间的夹角
d是两个公垂线在同一个转轴上的交点之间的距离,如图所示,实际上两个坐标轴,其中一个X轴转动theta角后与另一个X轴平行,两个X轴之间的距离
theta是两个公垂线之间的夹角(两个坐标系X轴的夹角),也就是转轴(关节)转动的角度
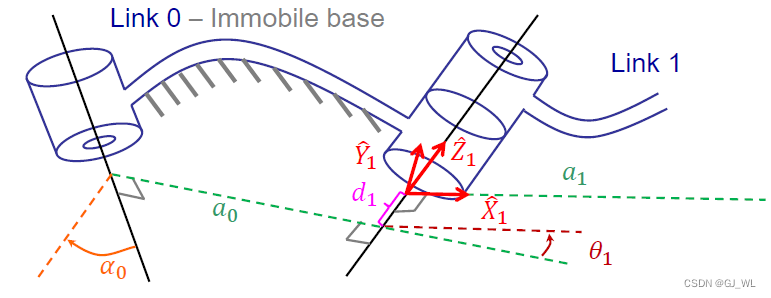
先分别定义坐标系,Z轴与转轴重合
直观理解DH表示法:


















 6311
6311
评论

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
查看更多评论
添加红包










