







力位混合控制,是指同时控制关节的力矩和角度。在机器人自适应打磨、按摩、抓持方面有较高的应用价值。通常机器人实现力位混合的方式是在控制末端将力与位置解耦分别进行控制,该解耦过程相对复杂,具有较高的技术门槛。
如果能够在机器人关节层面直接实现力与角度的混合控制,将大大降低机器人本体开发者实现力位混合的技术难度。
DrEmpower 智能一体化关节实现了在关节层面的力位混合控制,还可一并控制转速,实现力位速混合控制。为简单起见,我们依旧称之为力位混合控制。接下来介绍其力位混合控制功能的实现和效果。
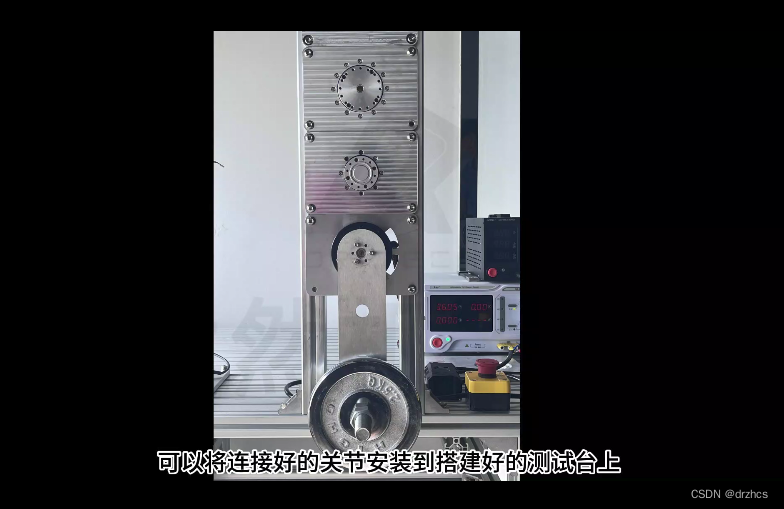
搭建好测试台,在关节输出轴装上摇臂,摇臂末端安装哑铃片
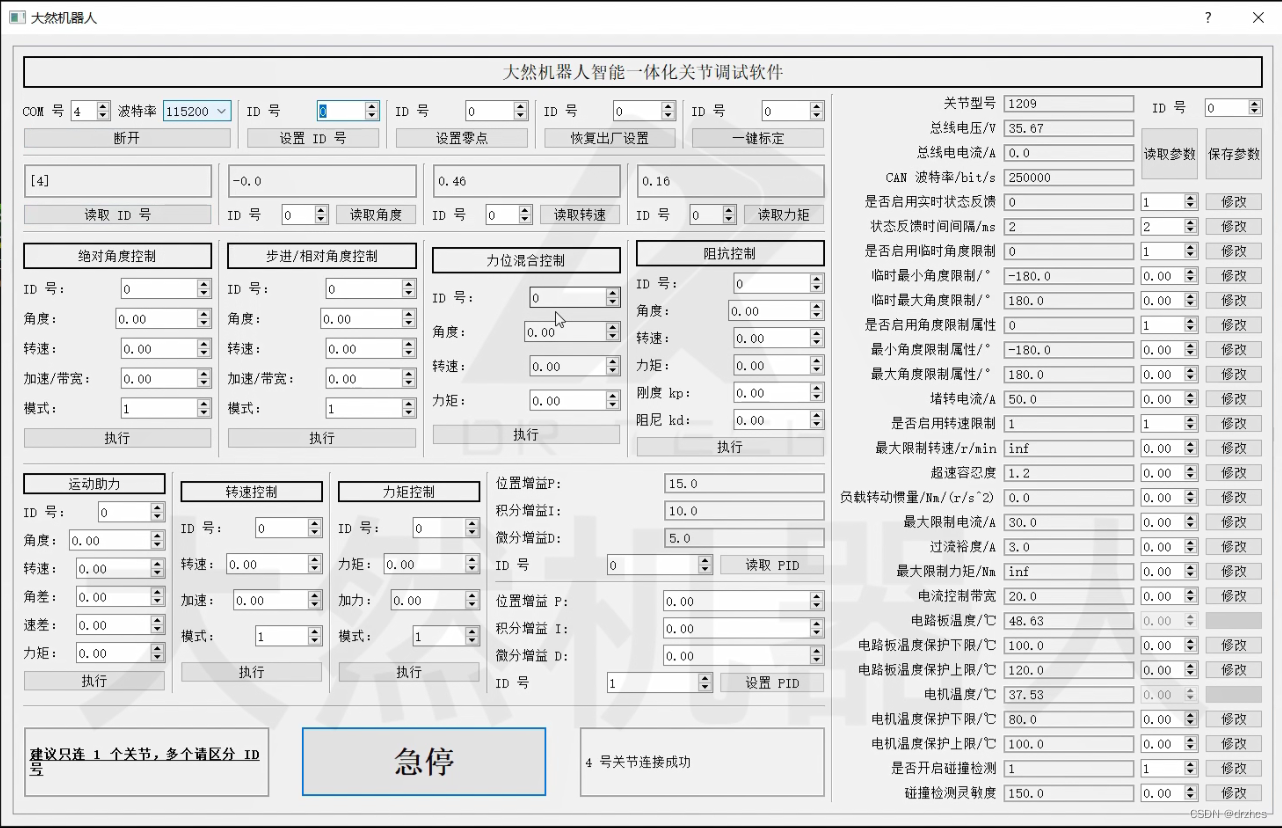
打开调试软件,填写端口号,选择波特率,点击“连接”。找到力位混合控制功能,指定4号关节以力位混合方式转动到180°,过程中转速为10r/min,力矩为9Nm,点击“执行”。
关节开始转动,中途可以被人手拦截,还可以被推回去,此时关节以刚才指定的9Nm力矩和10r/min与人手对抗,始终牢记其180°的转动目标。当人手撤去,关节会继续以10r/min转动到180°。当关节转到180°后我们依然可以用手去推他,一旦受到推力,他就会以9Nm力矩和10r/min转速与之对抗,直到推力撤走,他将以10r/min转回180°,依然不忘其目标角度。不知道你发现没有,整个过程中关节就像个忠诚的战士,不忘初心,以预设的力矩和转速对抗战斗过程中的任何艰难险阻,战斗结束后还要保护战果不被破坏。上位机(也就是他的长官)只需要下达一次指令其他的就都由关节自己完成,因此我们有时候也称该功能为运动自适应。
同样可以用 DrEmpower_can 库函数实现力位混合控制功能,调用set_angle_adaptive 函数,如下图

设置与刚才相同的参数,运行该函数。可以看到关节将表现出与刚才相同的效果:逆来顺受,自适应。
由此可见我们仅用一行代码就实现了力位混合控制,浙江大大降低机器人本体层面力位混合控制的开发难度。
玩转运动智能 DrEmpower QQ 交流群:964592447
DrEmpower 智能一体化关节更多功能及其函数介绍请见:玩转运动智能:DrEmpower 智能一体化关节 Python 库函数详解-CSDN博客

















 99
99

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









