







给定一个具有M个轮子的机器人,现在我们可以计算机器人底盘的运动学的约束。主要的思想是各轮子对机器人的运动加上零或更多的约束,所以过程只不过是根据机器人底盘上那些轮子的配置将全部由所有轮子引起的运动学的约束适当地联合起来。
我们已经把全部的轮子分类成五种类别:
(1)固定的标准轮,
(2)可操纵的标准轮,
(3)小脚轮,
(4)瑞典轮,
(5)球形轮。
但是,从方程(3.17)、(3.18)和(3.19)中的轮子运动学的约束,注意到小脚轮、瑞典轮和球形轮在机器人底盘上没有加运动学的约束,因为由于内部的轮子的自由度,,在所有这些情况中可自由地变化。
所以,只有固定的标准轮和可操纵的标准轮对机器人底盘的运动学有影响。因而,当计算机器人运动学的约束时,需要予以考虑。假定机器人总共有N个标准轮,它由N个固定的标准轮和N个可操纵的标准轮组成。我们用8(t)表示N个可操纵标准轮的可变操纵角;相反,如在图3.4所示,当作N个固定标准轮的方向。在轮子旋转的情况下,固定的和可操纵的轮子二者都有围绕水平轴的转动位置,它随时间函数而变化。我们把固定和可操纵情况分别表示成p(z)和φ。(),并用φ()表示联合二者值的集结矩阵

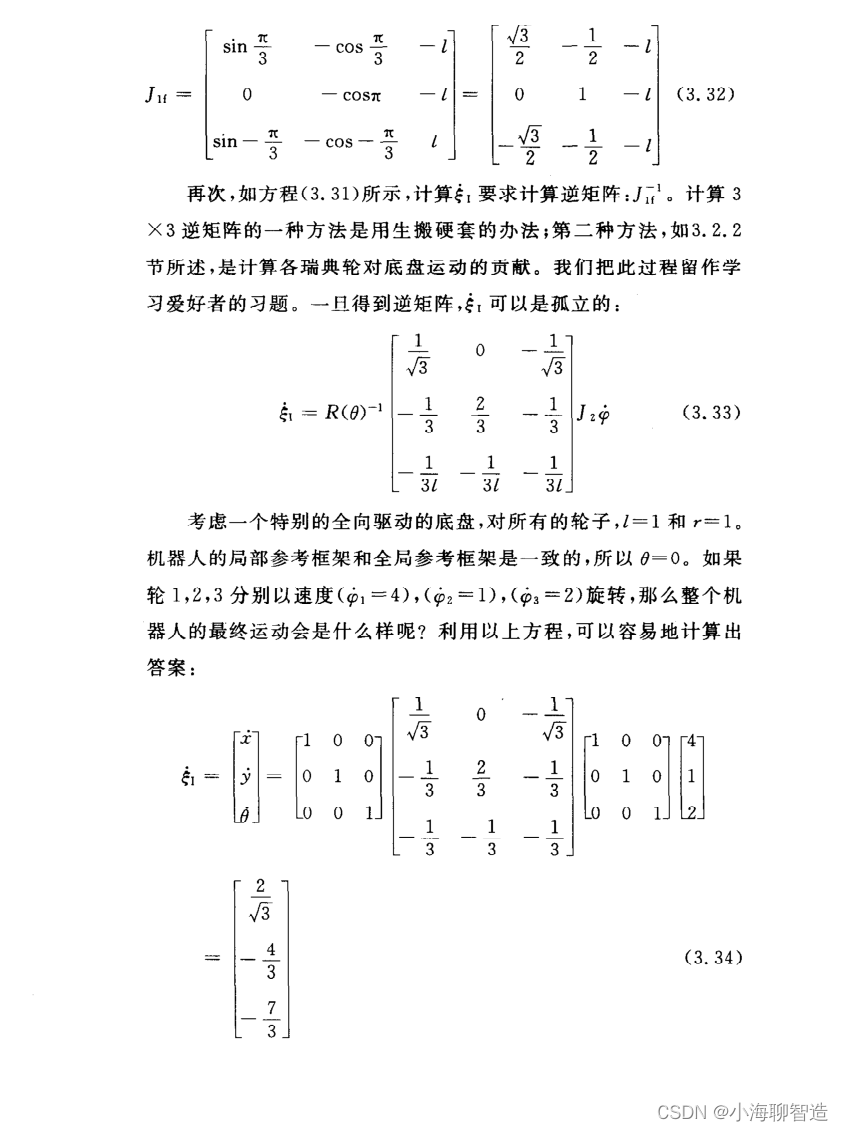
所以,该机器人将瞬时地以正的速度沿工轴运动,以负的速度沿y轴运动,同时顺时针转动。
从上面的例子我们可以看到,通过联合单个轮子的滚动约束,可以预测机器人的运动。
为了更深人一步,可以使用包含C(8、)的滑动约束,它使我们能计算机器人的机动性和工作空间,而不是仅仅预测它的运动。下面,我们检验使用滑动约束,有时与滚动约束结合的方法,以对机器人的机动性产生强有力的分析。















 175
175











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











