







 港科大发布了GVINS,一个结合GNSS原始测量与视觉、惯性信息的实时无漂移状态估计系统。该系统支持多星座,能在复杂环境中提供平滑一致的6-DoF定位。基于ROS Kinetic开发,依赖C++11、Eigen3.3.3、Ceres1.12.0和gnss_comm包。提供了详细的环境配置、源码下载和运行指南,以及数据集和相关资料。GVINS源码已在GitHub开源。
港科大发布了GVINS,一个结合GNSS原始测量与视觉、惯性信息的实时无漂移状态估计系统。该系统支持多星座,能在复杂环境中提供平滑一致的6-DoF定位。基于ROS Kinetic开发,依赖C++11、Eigen3.3.3、Ceres1.12.0和gnss_comm包。提供了详细的环境配置、源码下载和运行指南,以及数据集和相关资料。GVINS源码已在GitHub开源。
港科大又一力作!vins-mono以及vins-fusion升级版GVINS重磅发布!
苦苦寻觅带有GNSS的VIS,终于有了,最新资源!感谢港科大不断的研究以及开源!!大平台真好!
终于有一个包含GNSS紧耦合的方法了,加油学习!
0.简介
GVINS是一个基于非线性优化的系统,它将 GNSS 原始测量与视觉和惯性信息紧密融合,以实现实时和无漂移的状态估计。通过结合 GNSS 伪距和多普勒频移测量,GVINS 能够在复杂环境中提供平滑一致的 6-DoF 全局定位。系统框架和VIO部分改编自VINS-Mono。我们的系统包含以下功能:
• ECEF 框架中的全局 6-DoF 估计;
• 多星座支持(GPS、GLONASS、伽利略、北斗);
• 在线本地ENU帧对齐;
• GNSS 不友好甚至 GNSS 拒绝区域的全球姿态恢复。
GVINS源码:https://github.com/HKUST-Aerial-Robotics/GVINS,源码下载见最后:相关资料打包下载。
文章链接:GVINS: Tightly Coupled GNSS-Visual-Inertial Fusion for Smooth and Consistent State Estimation.
论文粗糙的翻译:https://blog.csdn.net/haner27/article/details/117929327
1.环境
1.1 C++11 编译器
这个包需要 C++11 的一些特性。
1.2 ROS
这个包是在ROS Kinetic环境下开发的。
1.3 Eigen
我们的代码使用Eigen 3.3.3进行矩阵操作。
注意:Eigen版本不要高!
如果安装错了可以看我的文章:Eigen重新下载、卸载和安装
1.4 Ceres
我们使用ceres 1.12.0 来解决非线性优化问题。
1.5 gnss_comm
这个包还需要gnss_comm用于 ROS 消息定义和一些实用功能。
https://github.com/HKUST-Aerial-Robotics/gnss_comm
按照这些说明构建gnss_comm包。
(gnss_comm是该版本环境新增的包,基于RTKLIB修改,详细介绍见上面功能包介绍,该包下载见最后:相关资料打包下载)
2.跑通GVINS
1.下载:
cd ~/catkin_ws/src/
git clone https://github.com/HKUST-Aerial-Robotics/GVINS.git
如果网络不好可以从这里下载:
2.构建:
cd ~/catkin_ws/
catkin_make
source ~/catkin_ws/devel/setup.bash
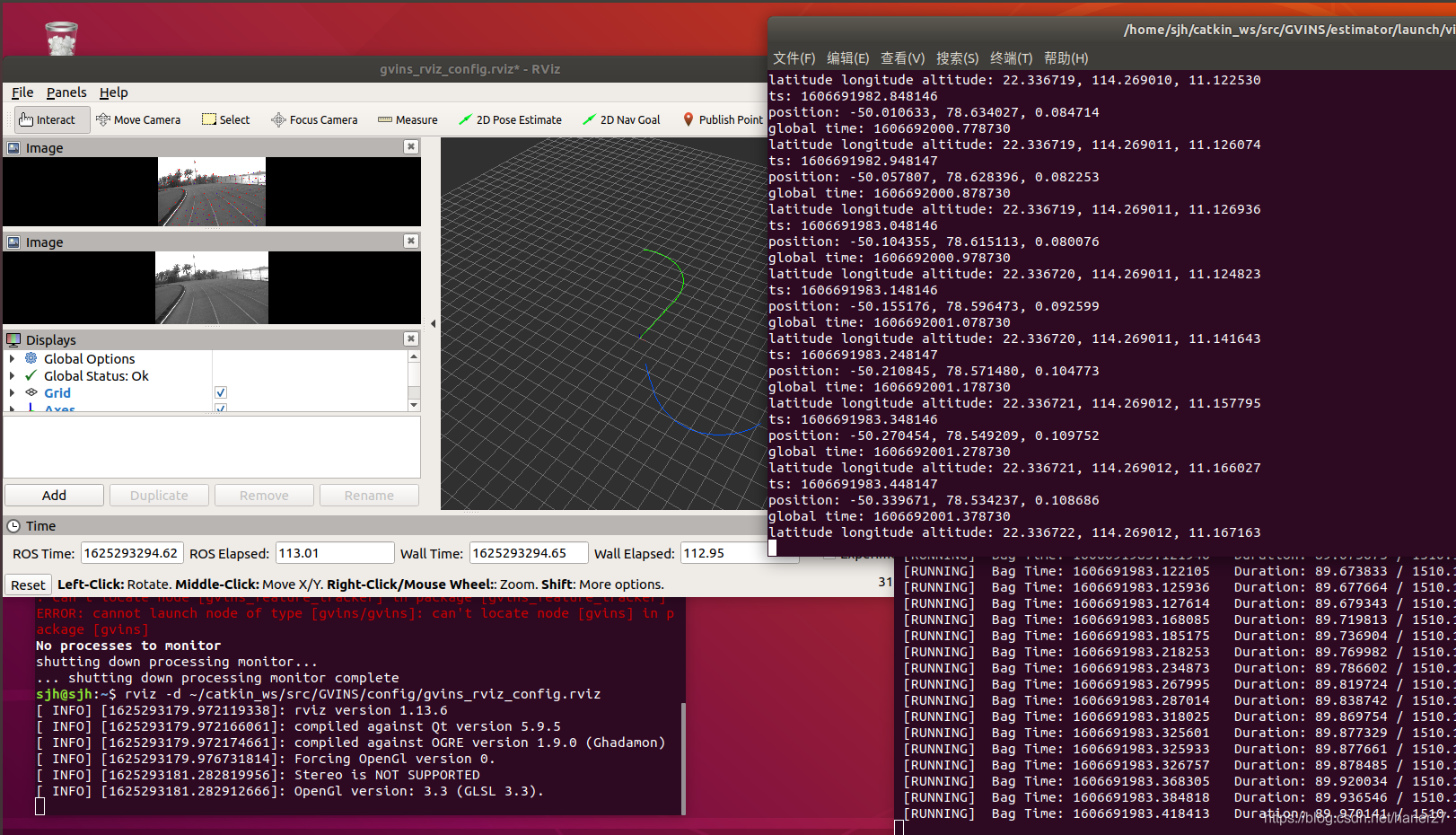
3.运行:
roslaunch gvins visensor_f9p.launch
rviz -d ~/catkin_ws/src/GVINS/config/gvins_rviz_config.rviz
rosbag play /mnt/hgfs/shared/dataset/sports_field.bag
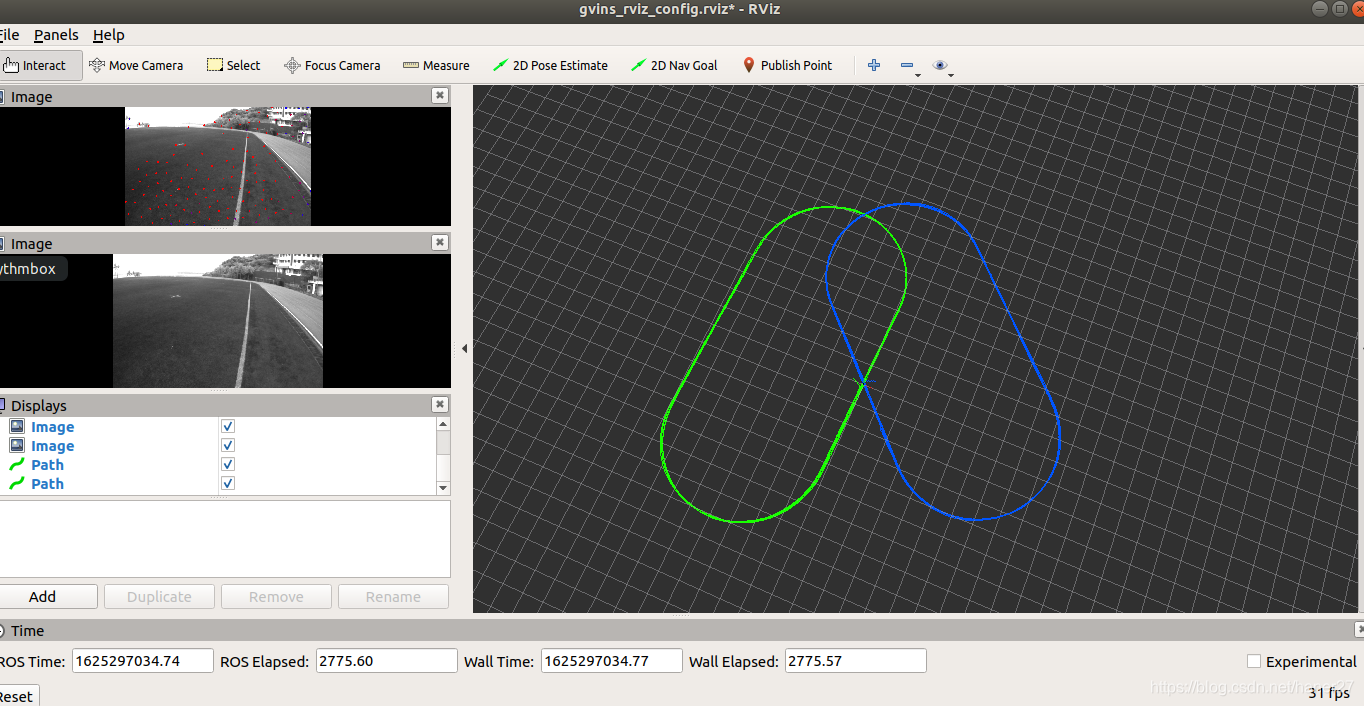
跑通效果:
操场,跑完效果:
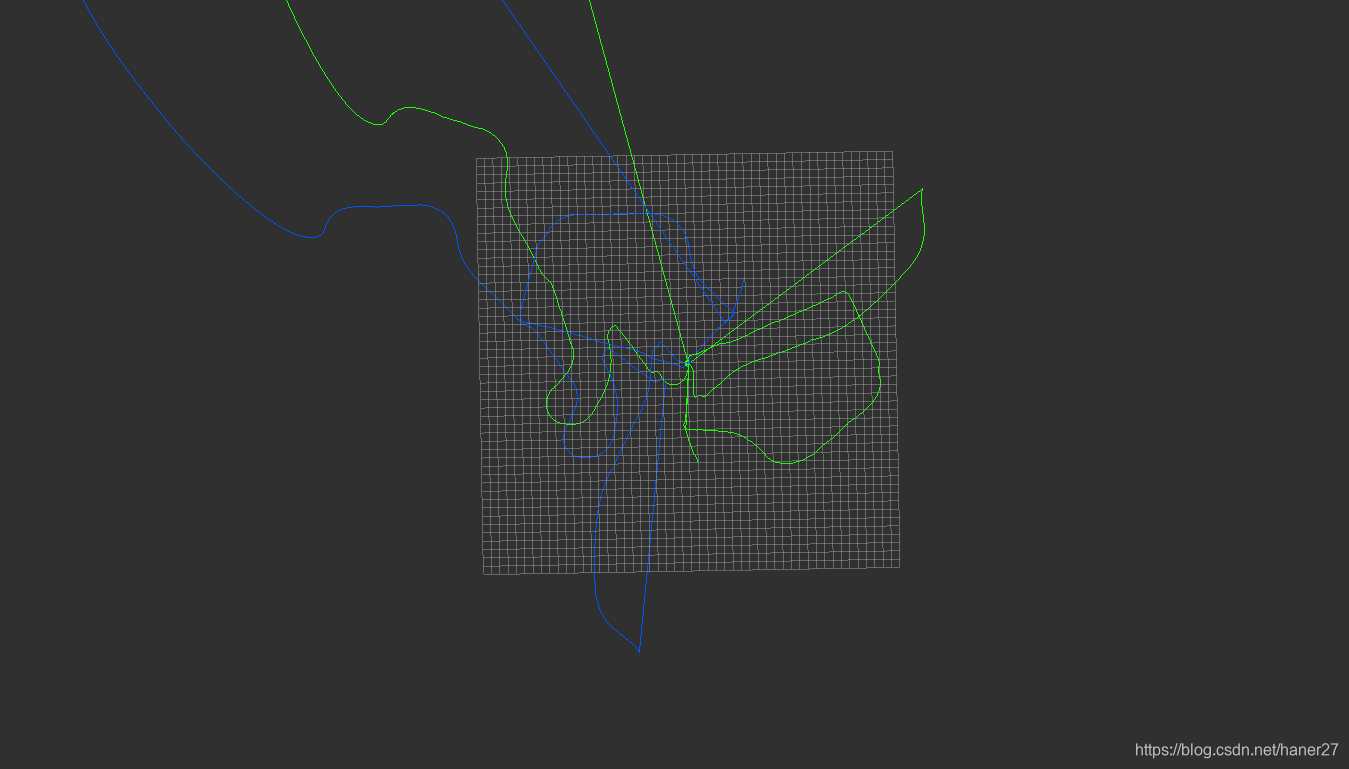
复杂环境: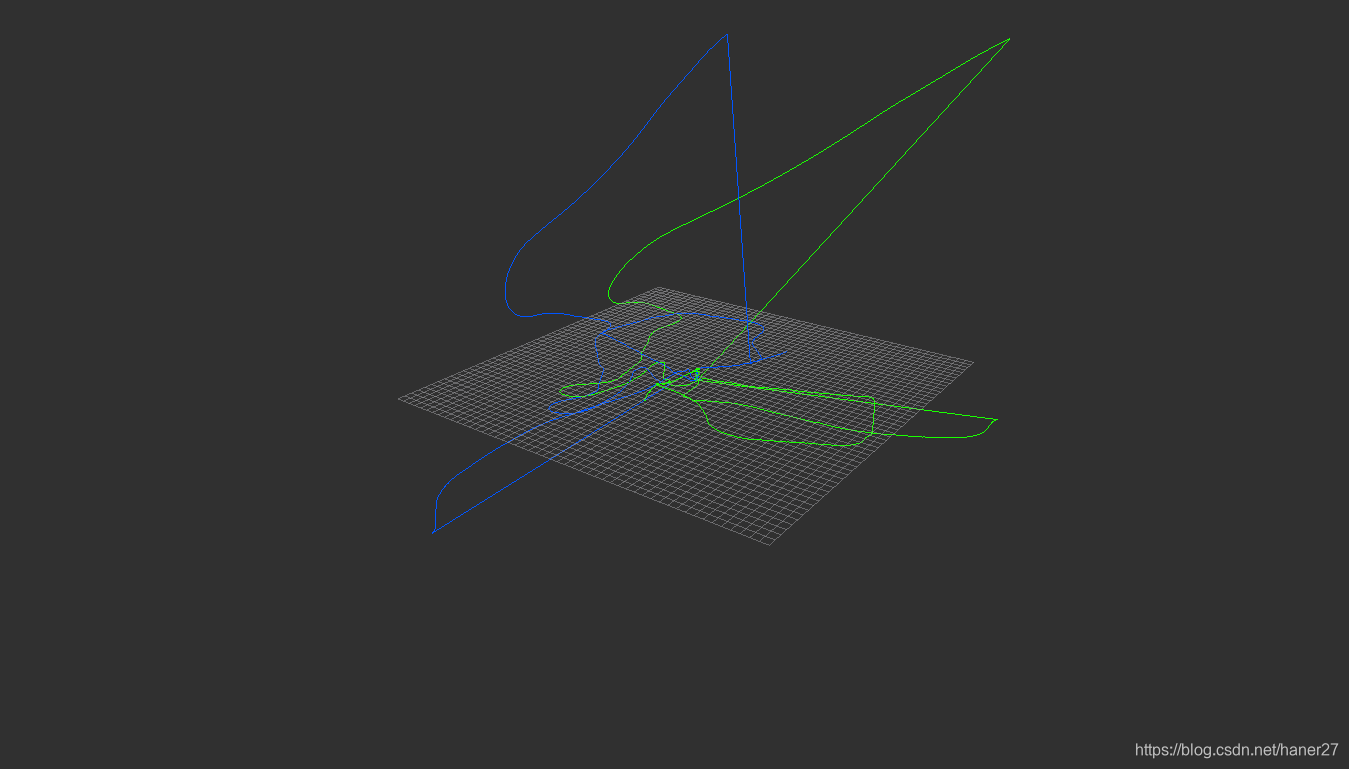
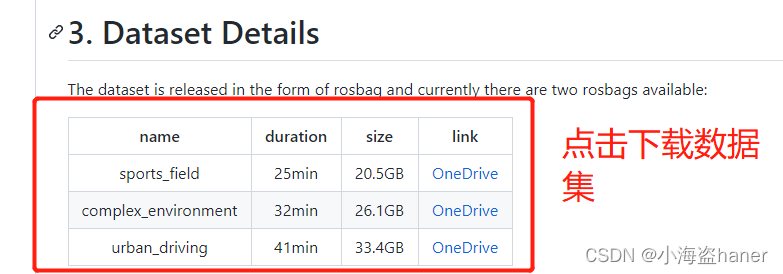
3.数据集
文章所用到的数据集都打包成ROS bag了,数据集介绍:https://github.com/HKUST-Aerial-Robotics/GVINS-Dataset,该包下载见最后:相关资料打包下载。
4.相关资料打包下载(不包括数据集)
这里只是github里涉及的三个包,可以看源码,这里面的在文章提到的链接里都可以下载到,该链接只图自己下载省事,也给网不好的小伙伴节省时间。注:不包括论文里的数据集,论文里数据集有两个,每个都20多个G,我下载好了,太大了,等着传网盘,或者有需要的小伙伴跟我联系吧。
我下了前两个包,就在家里下载的,很快。然后上传了阿里云,阿里云说不支持那个格式的包上传,我就压缩成zip上传,结果分享的时候,阿里云说不支持分享.zip格式,我……很尴尬,很抱歉各位
积分不够的伙伴私聊我,看到回及时回复的,有积分的伙伴支持一下,让我也能下点别的资源,感谢感谢!
https://download.csdn.net/download/haner27/19666160
!!!注意:这里面没有数据集!!!只有代码和资料!!!

6.泡泡机器人解读
GVINS:基于GNSS-视觉-惯性紧耦合融合的平滑一致状态估计方法
如果有用,就点个赞吧~


















 2456
2456

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









