






ROS和SIMULINK的通信
- 最近在做一篇工作,其中需要用到ROS和SIMULINK的通信,于是接着之前的一些尝试,花了一下午的时间踩了一些坑。
因为之前使用的版本过于老旧,MATLAB 2017b的,于是对他进行了升级,升级完后问题多多,其中的问题咱们先按下不表,从解决了问题之后的通信先介绍。
参照 https://blog.csdn.net/qq_44905590/article/details/104002673#commentBox 这篇文章里面的工作,可以很轻松完成自定义的数据结构和SIMULINK之间的通信
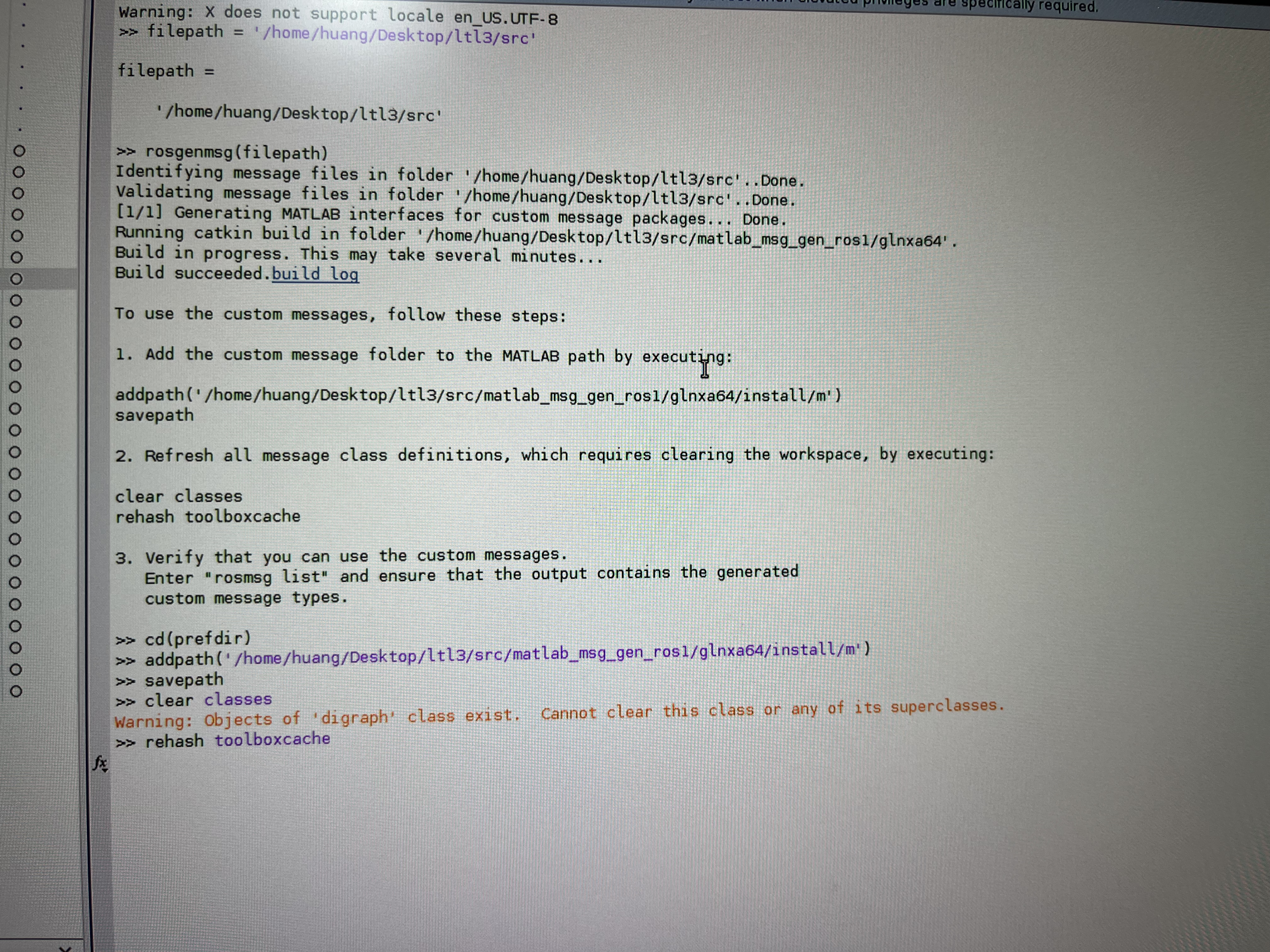
在这里插入一张我的结果图,跟上述这篇文章不同的是,此处我并没有进行 javaclasspath的设置,而是直接参照MATLAB的提示完成的。其中有点尤为重要,那就是 rosgenmsg()的时候,会出现路径出错的情况,结合网上的一些资料以及我自己的理解,大致解决方案可以分成以下几点:
- 路径中包含有中文或者其他文字;
- 需要单独把
msg放入到一个rospackage中,具体创建方法可以简单归纳为:创建工作区后,通过catkin_creat_package创建,然后编译通过后需要保证目录下存在.msg和package.xml,而rosgenmsg()的执行路径需要为存在.xml的上一层路径,如图下图所示。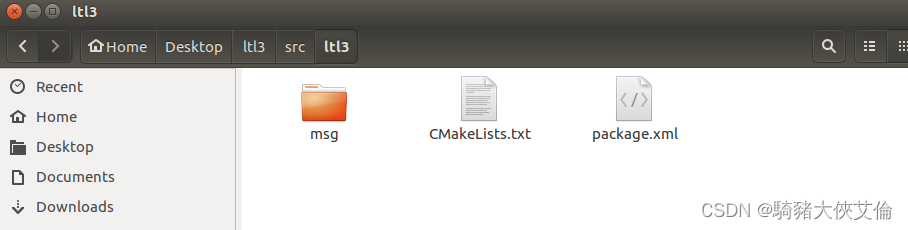
在这一切完成后,可以用rosmsg show *** 简单查看自己定义的消息是不是进来了。
升级MATLAB
正如上面所说,在升级MATLAB的过程中出现了许多的问题,在这章节,我们就详细聊聊。
- 删除老的版本;
- 安装新的版本;
- 新版本安装后python的版本切换。
针对第一和第二点,参考这篇文章,以及去官网下载需要的版本,基本可以解决。
值得一提的是,在安装新版本之后,需要授权激活给当前用户,比如在终端输入whoami,出来的用户名,但是值得注意的是,如果我们不用sudo matlab进入的话,会有很多的问题,比如我进入SIMULINK的时候,就提示我各种权限不足,因此,我们尝试用sudo进入,但是我们发现,这个时候会提示出错,
License Manager Error -9 Your username does not match the username in the license file.
在多方求证以及自己的探究下,得出结论,因为我们用sudo进入的账户名为root并非当前账户名,所以,我们激活的账户名应为root,在修改之后就能进入了。但是问题又来了,我们进入后发现如果尝试进入SIMULINK,会一片白如下(转载)。
在网上搜罗了很多方法之后,发现这篇文章的方法是行之有效的。具体如下:
- Matlab gtk package has to be installed, but matlab uses a specific version and also the module has to be linked
sudo apt-get install libcanberra-gtk* libgconf-2-4
sudo ln -s /usr/lib/x86_64-linux-gnu/gtk-2.0/modules/libcanberra-gtk-module.so /usr/lib/libcanberra-gtk-module.so - for newer linux distros root users are disallowed to run GUIs
xhost si:localuser:root
sudo ./matlab
解决了上述问题后,发现想要运行rosgenmsg()不行,因为python版本过低,不匹配,下载了python3.9.9,参考链接,其中值得注意的是,最后一步,参考软链接的部分ln -s /usr/local/python3/bin/python3 /usr/bin/python ,需要参考此文中,将python 3.9.9的python链接到/usr/bin/python3上,接下来便可以用以下指令安装新的catkin了,sudo apt install python3-pip,pip3 install catkin_pkg。(其中要注意的是,之前在python环境编译过的catkin ws需要重新创建空间和编译。
一些有用的参考
https://blog.csdn.net/Cappuccino_0/article/details/118875528 解决lsb_release 报错的问题;
https://blog.csdn.net/Baby_of_breath/article/details/125775743。















 197
197











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









