










前言
此文是对电机模型由定子空间位置(三相坐标轴)到复平面(两相坐标轴)再到dq坐标轴(旋转坐标轴)整个解耦过程的公式推导并由此得到foc(clark、park、ipark)变换。望君多多指点;
一、建立数学模型的作用?
先熟悉一下数学模型;
1.电压方程:关于电压跟电流非线性的关系函数;
2.磁链方程:电流跟磁链的关系属于线性关系;如果有电机转子磁链跟定子电感可以根据电流得出磁链关系(定子电感主要由磁极磁导率、大小决定);
3.转矩方程:以磁链为中间变量电流跟力矩的线性关系
4.运动方程:力矩跟转速之间的非线性关系函数;

如上图:
速度环:根据运动方程我们就能知道我们如果想要控制转速或者位置,需要对力矩进行控制;因为力矩跟转速是非线性系统,所以在这就引入pi控制器也就是我们说的速度环调节器,属于一个控制系统了,通过已知的固定参数,并调节系统带宽最终达到转速的控制;一些摩擦系数转动惯量可以通过自整定算法计算,但往往会存在偏差,最终还需要实际调节(试凑法)
电流环:因为力矩跟电流是属于线性关系,所以只需要考虑电流跟电压的关系,也就是所谓的电流环,这里也是因为电压跟电流的二阶阻尼系统所以引入pi控制器,通过调节电压的大小进而得到目标电流;(电流环的带宽只跟电阻、电感、转子磁链等电机本体参数有关)
二、数学模型
1.三相坐标系下数学模型
1.电压方程

2.磁链方程

其中:La为a相线圈自感、Lab为ab相线圈之间的互感
如上图为三相坐标系下的电压方程以及磁链方程;耦合行非常强,这也就是我们引进foc的目的,对强耦合的数学模型解耦由原本的控制交流变为dq轴的直流控制;
2.复平面的数学模型(两相坐标)
1.复平面跟极坐标

上述是依据欧拉公式为基础,根据实际的三相定子线圈以及转子空间位置推导的极坐标向量
2.极坐标下的电压方程
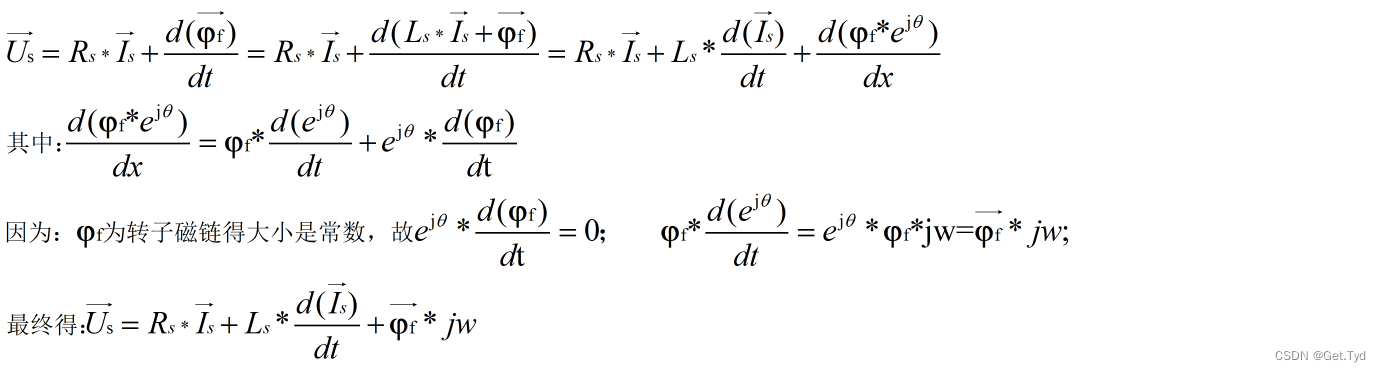

Ls:电感跟磁导成比例关系,可以根据这点推出Ls;如果转子为隐极(SPMSM)的话气隙磁场跟转子磁极磁导率一致,故整个转子跟定子间的磁阻大小均匀分布,得Ls=Ld=Lq=1/2线电感;如果为凸极机(IPMSM)得话一般电机图纸都会给出实际得dq轴电感;
Rs=相电阻=1/2线电阻;
3.极坐标下磁链方程

3.dq轴坐标数学模型(旋转坐标)
1.dq坐标跟极坐标
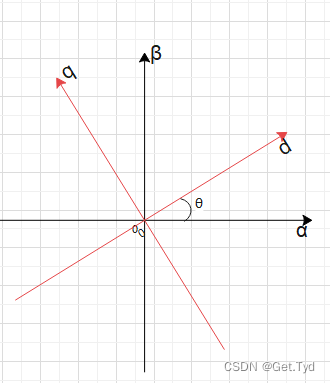
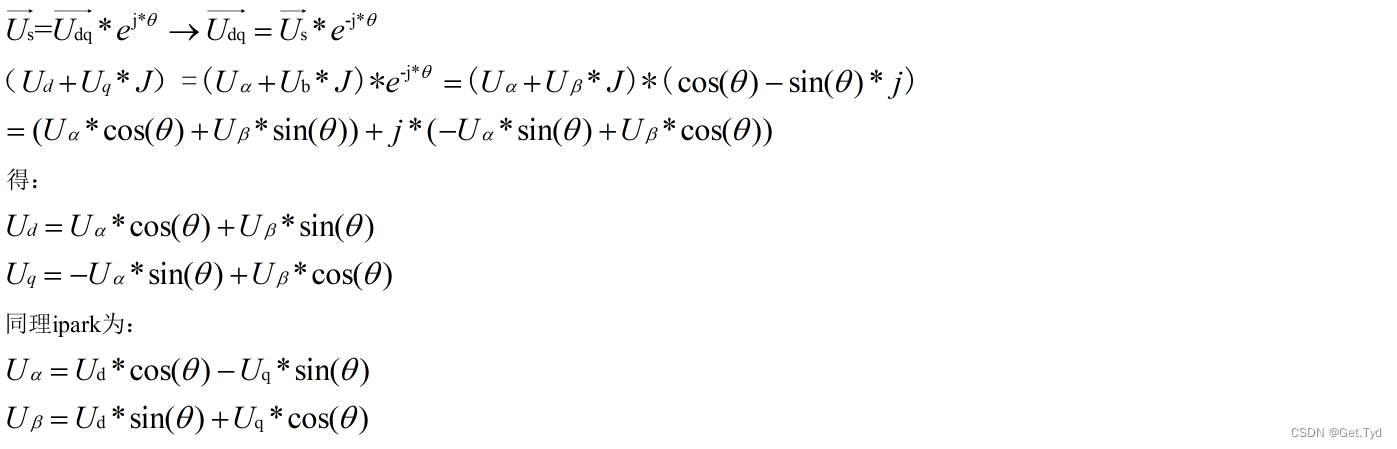
如上图所示,将dq轴与的αβ坐标轴标在同一坐标系:把d轴作为一个矢量,在αβ坐标轴的矢量向量就为|d|*e指数jθ,由此可得:极坐标跟旋转坐标的关系:

2.dq坐标下得电压方程推导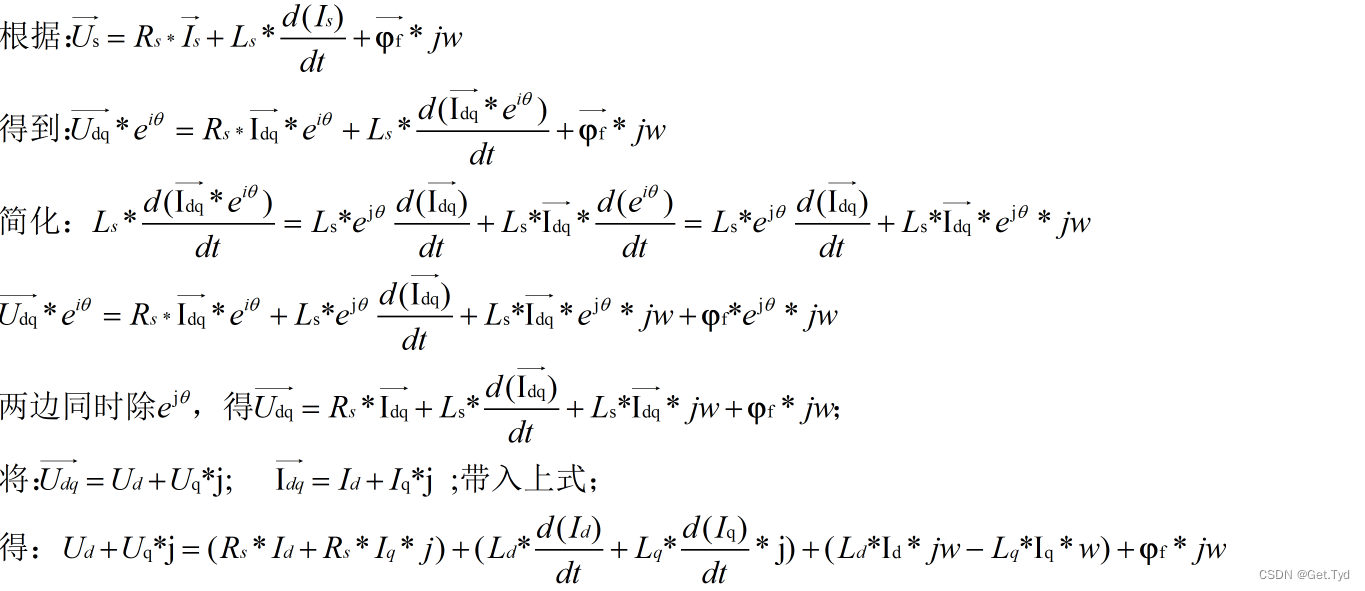

3.dq坐标轴下的磁链方程

4.转矩方程

5运动方程

4.clark、park推导
1.clark推导
以电压变换为例
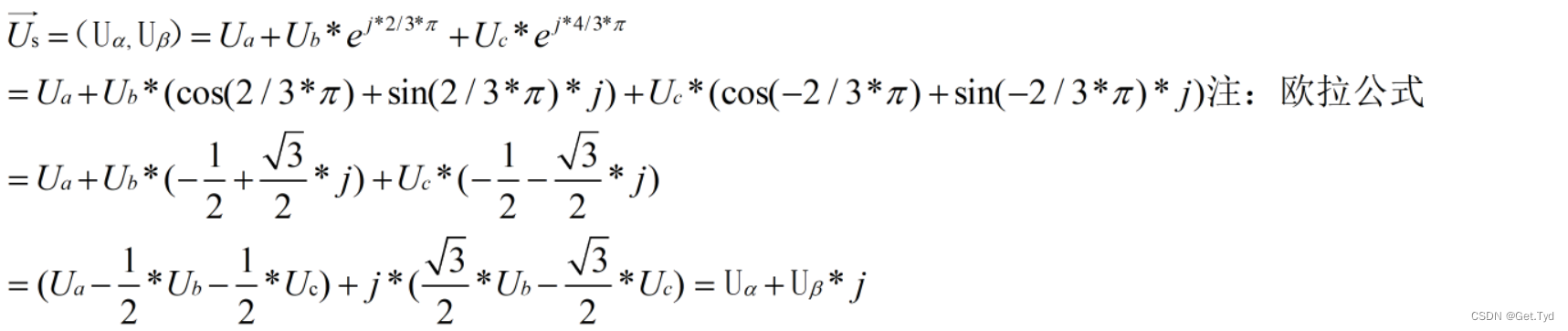
综上所述:

到这就会有人提出这跟书中或者其他地方不一样呢?
正常应该是:
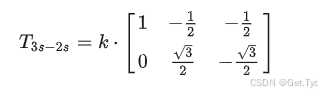
其中:k=2/3则为等幅值变换k=根号2/3为恒功率变换
个人理解原因为如下: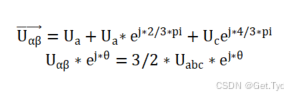
如上公式中变换前后幅值基础对于前者不一致,但是在svpwm输出是期望电压幅值为以Uabc为基础实际输出,但是clark变换中是以电流为基础,如果乘2/3同样也就为以I abc为基础,这样就能保证电机数据模型准确。
2.park推导

















 2744
2744

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









