







 超级会员免费看
超级会员免费看
 本文档详细介绍了ardupilot的px_uploader.py代码学习过程,主要内容包括串口识别、Python版本判断、firmware类与uploader类的定义,以及固件更新的核心函数如擦除命令、进度条、发送与接收信息等。通过理解这些内容,可以掌握ardupilot如何通过USB进行飞控固件升级。
本文档详细介绍了ardupilot的px_uploader.py代码学习过程,主要内容包括串口识别、Python版本判断、firmware类与uploader类的定义,以及固件更新的核心函数如擦除命令、进度条、发送与接收信息等。通过理解这些内容,可以掌握ardupilot如何通过USB进行飞控固件升级。
目录
0 摘要
本节主要记录自己学习ardupilot的px_uploader.py代码过程。采用ubuntu编译后代码,会提示下面语句。
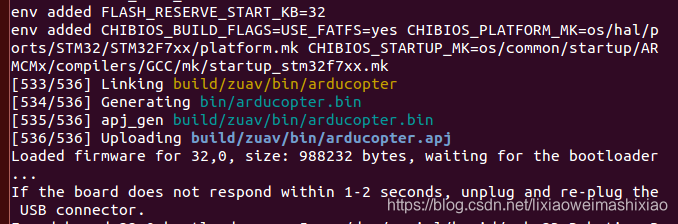
然后使用usb连接飞控一端,另外一端连接到电脑,当电脑识别到USB端口后会运行一下显示。
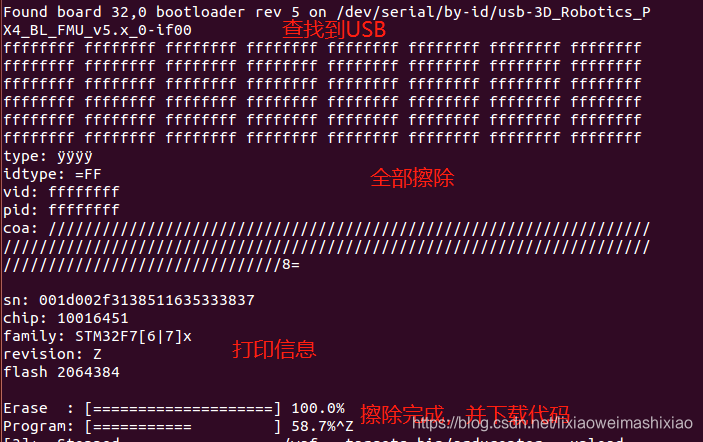
上面所出现的信息,我们从哪里学习呢,这是本节重点要学习的内容,并理解ardupilot如何给飞控升级固件。注意;MP采用C#语言也可以实现给飞控升级固件。
本节主要记录自己学习ardupilot的px_uploader.py代码过程。采用ubuntu编译后代码,会提示下面语句。
然后使用usb连接飞控一端,另外一端连接到电脑,当电脑识别到USB端口后会运行一下显示。
上面所出现的信息,我们从哪里学习呢,这是本节重点要学习的内容,并理解ardupilot如何给飞控升级固件。注意;MP采用C#语言也可以实现给飞控升级固件。
 517
823
517
823

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


























