







Fist you have install Ubuntu16.04 on your computer. if you want to use ROS ,you can install and configure follow the steps.
1.chose the version of ros
ubuntu16.04/ubuntu15.10----------------ROS Kinetic Kame
ubuntu15.04/ubuntuLTS14.04-----------ROS Jade Turtlr
ubuntu14.04----------------------------------ROS indigo lgloo
ubuntu12.04LTS-----------------------------ROS Hydro Medusa
ubuntu12.04----------------------------------ROS Groovy Galapagos
2.installation steps
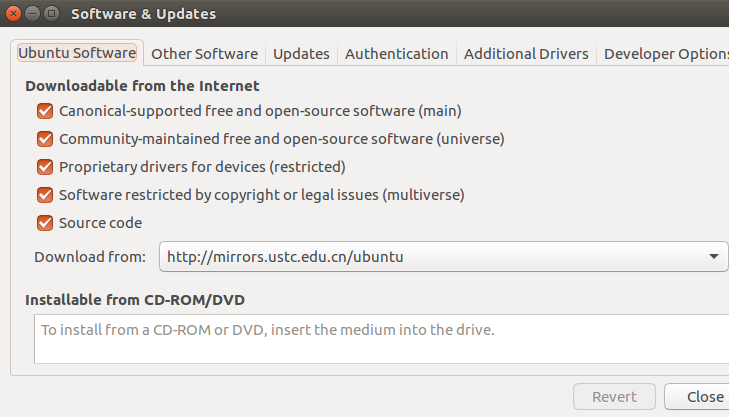
(1)"configure"----“software & update”
(2)enter these in the terminal in turn
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'(3)Initialize ROSsudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116sudo apt-get updatesudo apt-get install ros-kinetic-desktop-fullapt-cache search ros-kinetic
sudo rosdep init
rosdep update
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
(4) Install the plugin
sudo apt-get install python-rosinstall
(5)Install other plugin
sudo apt-get install ros-kinetic-(the name of plugin) such as sudo apt-get install ros-kinetic-turtlebot* (6)set up ROS roscore















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









