








 超级会员免费看
超级会员免费看

 本文介绍了PLC PID控制器中非线性参数整定的方法,重点探讨了比例(P)、积分(Ki)和微分(Kd)系数的非线性算法,特别是利用sech()函数进行优化。通过坐标缩放处理,解决了偏差大时计算问题,并提供了比例项的SCL代码实现。
本文介绍了PLC PID控制器中非线性参数整定的方法,重点探讨了比例(P)、积分(Ki)和微分(Kd)系数的非线性算法,特别是利用sech()函数进行优化。通过坐标缩放处理,解决了偏差大时计算问题,并提供了比例项的SCL代码实现。
根据一般PID的响应曲线,我们可以设计更加符合响应曲线的P、I、D参数,这里的非线性是指参数整定方法采用非线性,并不是PID本身的算法,非线性的PID算法后面会给大家讲。包括韩京清老师提出的ADRC都属于非线性PID范畴。本文给出主要的公式算法实现,Kp项完整scl代码已经给出,Ki和Kd项按照公式计算即可这里不再列出。具体PID里面系数传递自行设计测试就好。
1、比例(P),积分系数(Ki)、微分系数(Kd)对应的非线性算法如下:
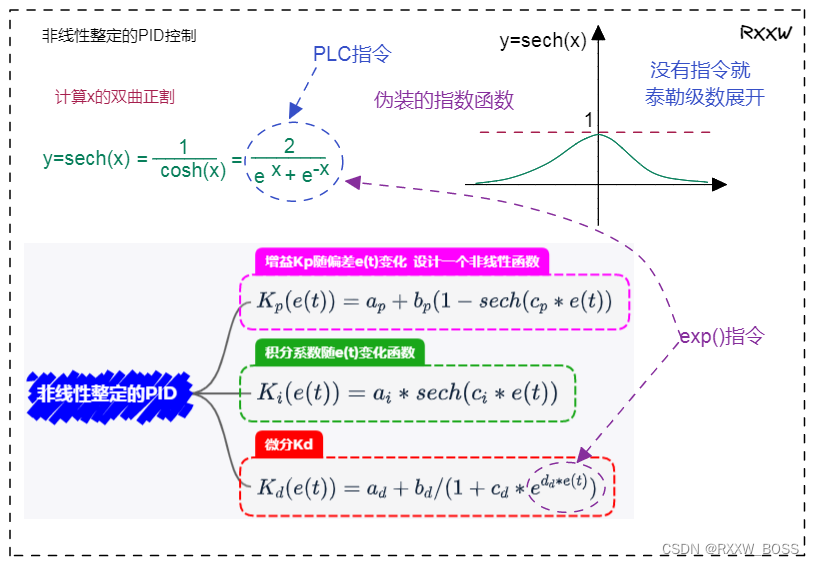
关于双曲三角函数,不太清楚的可以简单的翻下书本,这里不做过多讲解 ,简单的看下它的函数 图像,为什么我们选定这个函数做为核函数。
微分项上图的由于笔误,大家可以看下面的这张图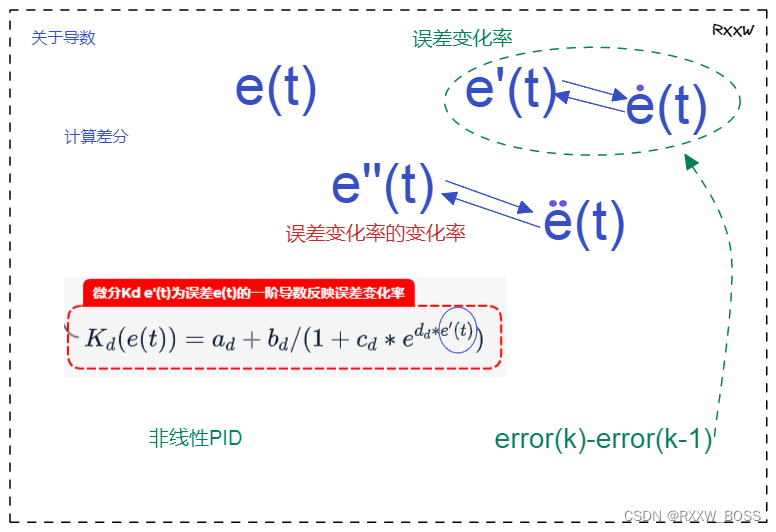

 订阅专栏 解锁全文
订阅专栏 解锁全文




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











