









 本文详细介绍了倒立摆的模型分析,从单摆模型到倒立摆的线性化方程,涵盖SCL编程和MPC控制方案。通过PD+状态空间方程及PID控制探讨控制策略,并讨论了摆杆质心加速度的计算,同时提供了完整的STL代码示例。
本文详细介绍了倒立摆的模型分析,从单摆模型到倒立摆的线性化方程,涵盖SCL编程和MPC控制方案。通过PD+状态空间方程及PID控制探讨控制策略,并讨论了摆杆质心加速度的计算,同时提供了完整的STL代码示例。
首先简单介绍下倒立摆模型,下面这幅图是MATLAB网站上的倒立摆模型,下面我们利用牛顿第二运动定律建立摆杆的运动方程。
1、倒立摆模型
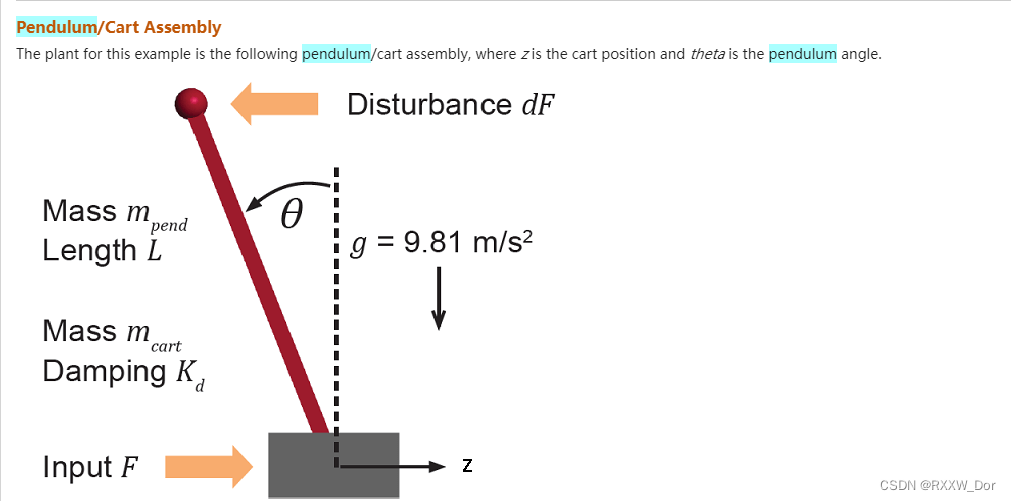
Disturbance dF--外部扰动,外部作用力, Mass mPend--摆杆质量 L--摆杆长度 mCart--滑块质量。 Kd--阻尼系数。 g--9.81m/s^2重力加速度常量值。在分析倒立摆模型之前,我们简单的看下单摆(也叫数学摆)。
2、单摆模型
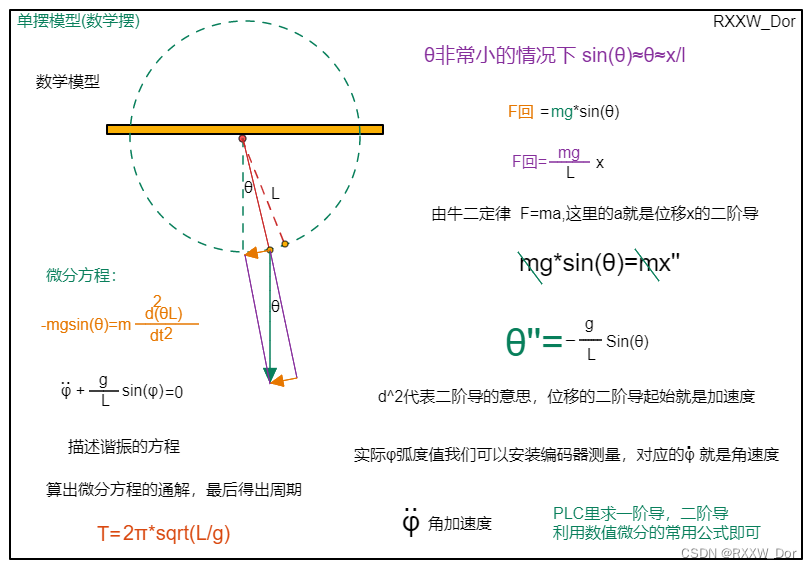
在φ0(微分方程初值)角度非常小的时候,情况比较好处理(小摆角情况)。当φ0=π/2时,计算要变得复杂一点,需要用到椭圆积分。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











