






人形机器人根据移动方式不同,可分为双足和轮式。
双足是现阶段大多数人形机器人企业旗下人形机器人产品形态(完全拟人形态);行业内另外一种声音:现阶段腿部控制能力不足,目前直接模仿人类,设计成双足并不是最优解,而是要逐步渐进式发展,先设计成更容易落地的轮式;当然还有另外一种声音,移动方式不是重点,重点是灵巧手,并因此涌现出一批以灵巧手为卖点的人形机器人企业(戴盟机器人等),有关灵巧手,会在其他文章进行梳理。
轮式相较于双足,更容易完成商业化落地,已经是行业共识;目前国内已涌现出一批走轮式路线的人形机器人本体企业(如:银河通用、星海图、星尘智能、帕西尼感知等)。
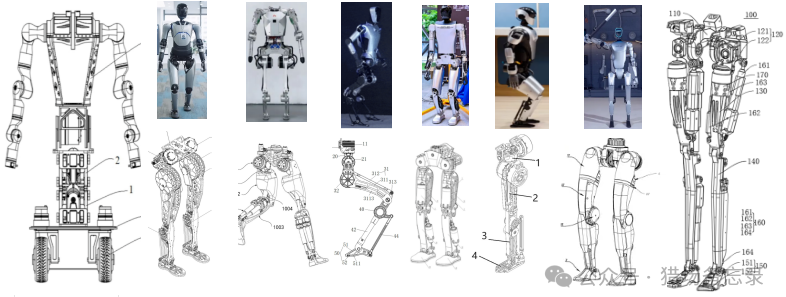
随着诸多人形机器人本体厂商亮相2024世界机器人大会,才发现诸多双足人形机器人本体企业,已默默研发出了轮式双臂仿生机器人。

从左至右依次为:乐聚、智元、科大讯飞、星动纪元、北京具身智能创新中心公司的轮式仿生机器人
接下来小编盘点了国内头部人形机器人企业旗下双足人形机器人产品腿部结构和轮式人形机器人轮式结构专利及亮点(包括智元机器人-A1和A2及轮式、乐聚(深圳)机器人-“夸父”、宇树科技-G1、逐际动力旗下CL-1、开普勒-K1、优必选、优世界、星动纪元、傅利叶和Sanctuary AI:共9家、11种人形机器人腿部结构、2种轮式结构):
智元机器人-远征A2:
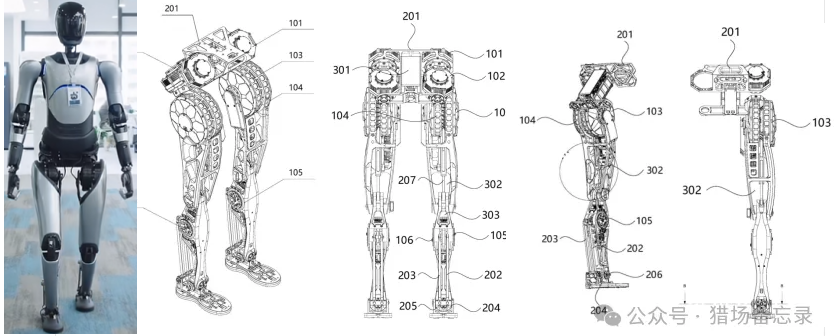
图片来源:CN 118182675 A(智元机器人)
【智元机器人】在2024年4月24日提交了一项专利申请,于2024年6月14日公开,专利名称为“仿人机器人及其下肢装置”,该专利号为CN 118182675 A;
该专利产品亮点/作用:通过优化髋关节电机模组的布局和角度分布,降低大腿结构对髋关节电机模组的力矩需求,提高仿人机器人腿部运动控制的精度,确保了仿人机器人动作的连续性和流畅性,显著提高机器人下肢的运动效率和稳定性。
智元机器人-远征A1:
图片来源:CN 117022492 A(智元机器人)
【智元机器人】在2023年8月4日提交了一项专利申请,于2023年11月10日公开,专利名称为“机器人下肢结构及机器人”,该专利号为CN 117022492 A;
该专利产品亮点/作用:简化机器人下肢结构,降低运动控制难度,使机器人步态和动作更加流畅。
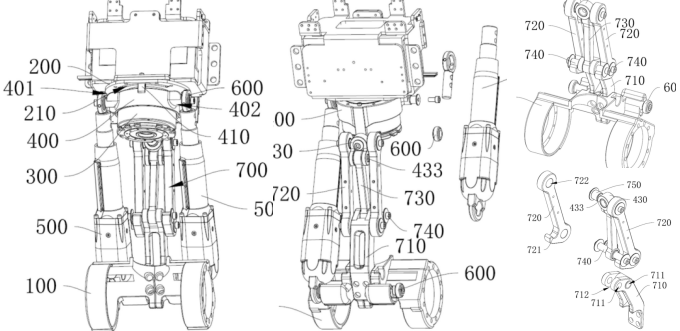
智元机器人-轮式专利:
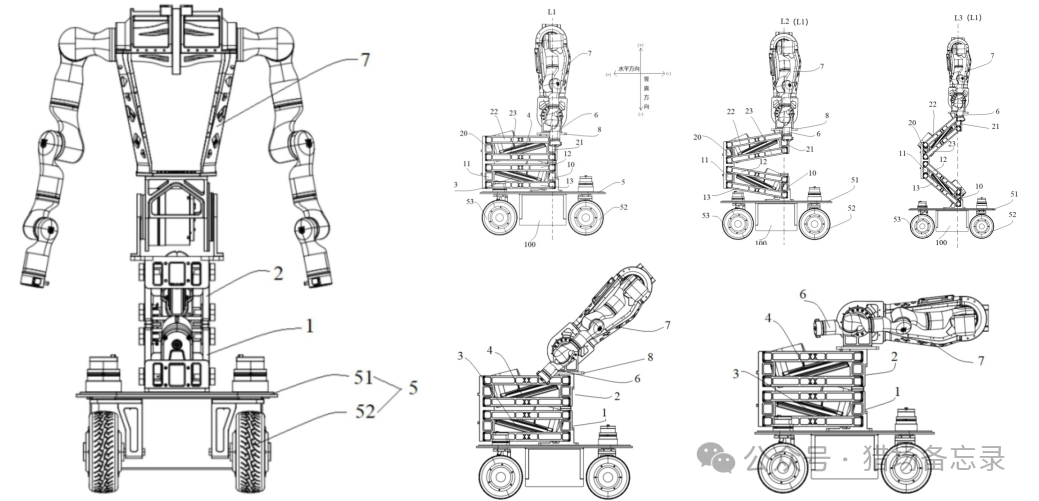
图片来源:CN 118238181 A
【智元机器人】在2024年4月30日提交了一项专利申请,于2024年6月25日公开,专利名称为“机器人支撑设备以及机器人组件”,该专利号为 CN 118238181A;
该专利产品亮点/作用:支撑设备使得机器人能够在竖直方向进行升降运动,并可通过连杆之间角度调节完成相对位置前进和后退;底座使得机器人完成前进和后退;整体设计提高了机器人的操作灵活性和精确度。
这个专利非智元已发布轮式机器人远征A2-W,该专利更类似国内人形机器人企业【银河通用】旗下轮式机器人G1。

银河通用G1
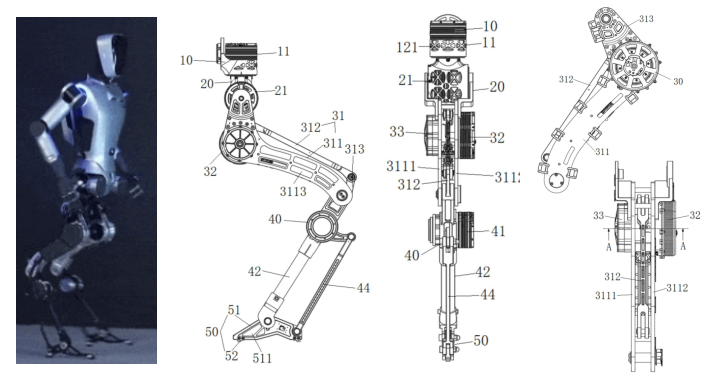
宇树科技-G1:
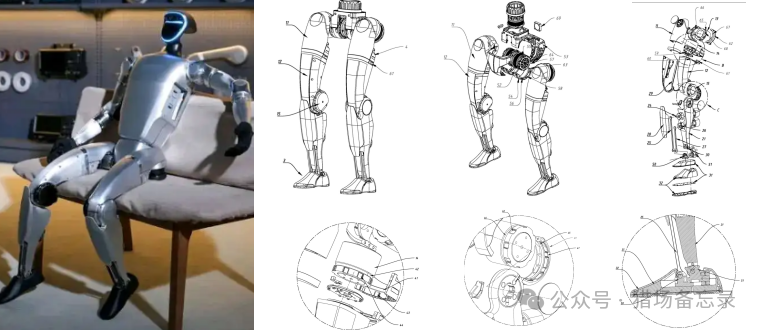
图片来源:CN 118289111 A(宇树科技)
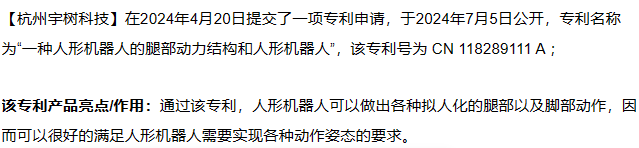
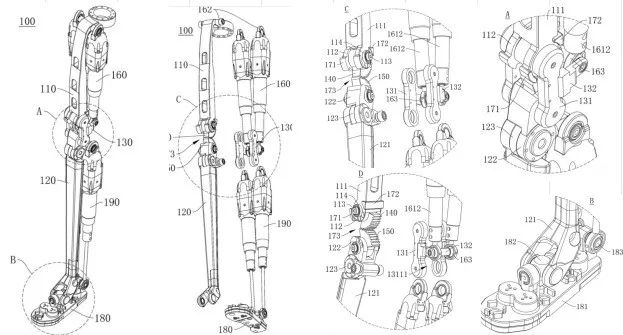
逐际动力-CL-1:
图片来源:CN 116946280 A(逐际动力)
【深圳逐际动力】在2023年8月23日提交了一项专利申请,于2023年10月27日公开,专利名称为“双足机器人、人形机器人,机器人”,该专利号为CN 116946280 A;
该专利产品亮点/作用:通过合理布置机身、腿组件及各关节模组,整体结构简洁轻便,行走时易于控制、能耗低,也利于拆装和后期的维护保养。
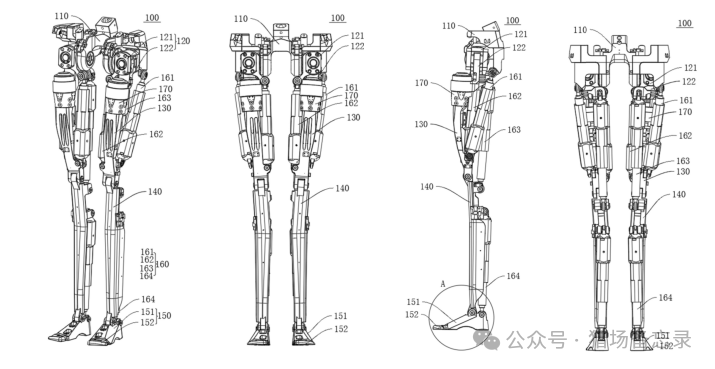
乐聚机器人-夸父:
图片来源:CN 118025368 A(乐聚机器人)
【乐聚(深圳)机器人】在2024年3月4日提交了一项专利申请,于2024年5月14日公开,专利名称为“一种机器人腿部装置及具有其的人形机器人”,该专利号为 CN 118025368 A;
该专利产品亮点/作用:克服现有技术中的双足机器人的腿结构在受到由于足底冲击引起的较大倾覆力矩时,大腿和小腿会产生较大倾斜角度而倾倒的缺陷。
开普勒-先行者K1:
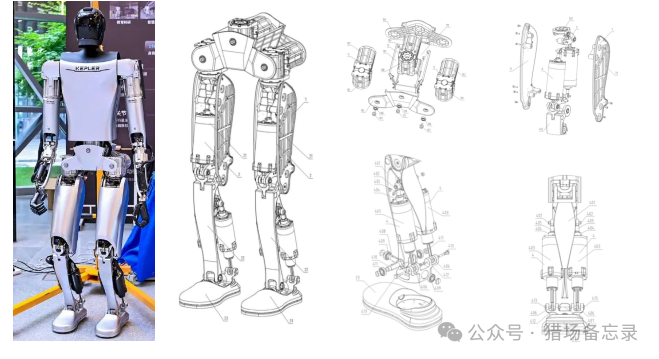
图片来源:CN 117533433 A(开普勒)
【上海开普勒】在2023年12月1日提交了一项专利申请,于2024年2月9日公开,专利名称为“一种双足机器人”,该专利号为CN 117533433 A ;
该专利产品亮点/作用:解决现有技术中双足机器人的髋关节驱动器串联堆叠使得机器人整体结构笨重冗余、整机难以维护和保养的技术问题。
优必选-未知:
图片来源:CN 117208115 A(优必选)
【优必选】在2023年10月16日提交了一项专利申请,于2023年12月12日公开,专利名称为“一种下肢结构及机器人”,该专利号为CN 117208115 A;
看外观,不是旗下工业人形机器人Walker S系列。
优世界(优必选控股公司)-未知:
图片来源:CN117963034A(优世界)
【优世界】(优必选控股公司)在2024年2月28日提交了一项专利申请,于2024年5月3日公开,专利名称为“一种腿部结构及机器人”,该专利号为CN117963034A;
该专利产品亮点/作用:主要针对人形机器人腰部结构,使人形机器人腰部能够实现多种动作,如腰部转动、前倾、后仰、左倾、右倾、左侧前倾、右侧前倾等,满足人形机器人的仿生动作预期效果。
优世界(优必选控股公司)-人形机器人腰部结构:
图片来源:CN118081796A(优世界)
【优世界】(优必选控股公司)在2024年4月9日提交了一项专利申请,于2024年5月28日公开,专利名称为“人形机器人”,该专利号为CN118081796A;
该专利产品亮点/作用:主要针对人形机器人腰部结构,使人形机器人腰部能够实现多种动作,如腰部转动、前倾、后仰、左倾、右倾、左侧前倾、右侧前倾等,满足人形机器人的仿生动作预期效果。
星动纪元-最初“小星”:
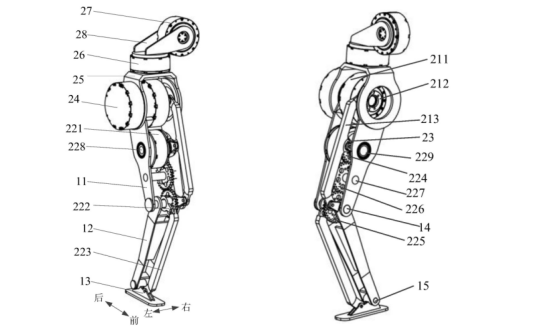
图片来源:CN118494639A(星动纪元)
【北京星动纪元】2024年6月6日提交了一项专利申请,于2024年8月16日公开,专利名称为“机器腿组件和机器人”,该专利号为CN118494639A;
该专利产品亮点/作用:解决相关技术中机器腿部的质量中心不够集中,进而导致机器腿部的控制效果较差的问题。
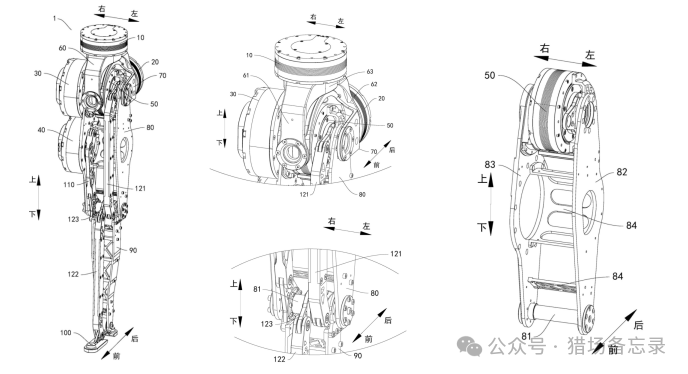
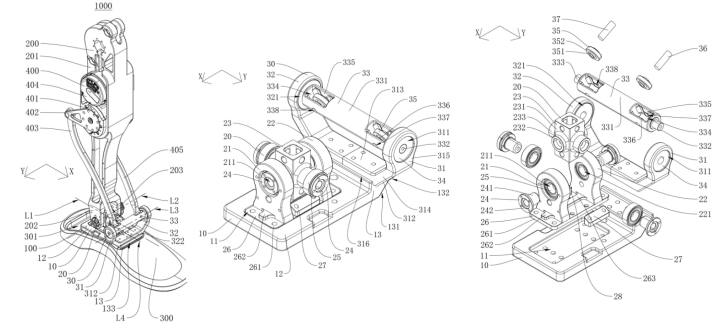
图片来源:CN 115593535 A(清华大学、星动纪元)
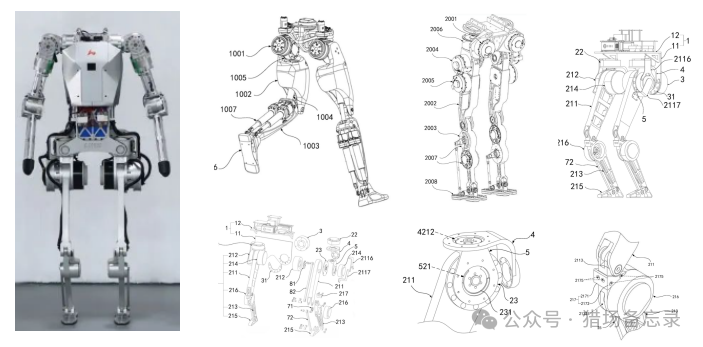
傅利叶-未知:
图片来源:CN118560604A(傅利叶)
【傅利叶智能】2024年7月26日提交了一项专利申请,于2024年8月30日公开,专利名称为“支撑组件、下肢总成和人形机器人”,该专利号为CN118560604A;
该专利产品亮点/作用:提供一种支撑组件、下肢总成和人形机器人,解决仿形腿、仿形脚掌以及驱动结构的装配复杂的问题。
傅利叶往期鲜有专利披露,近期连发多个专利。
Sanctuary AI:
Sanctuary AI创始人Geordie Rose近期接受采访时表示:双足人形机器人是愚蠢的,任何支持他们的人都没有花超过5分钟思考这个问题;几乎所有工作都更适合在轮子的环境中完成;并表示:将人形机器人设计成双足是愚蠢的、严重限制能力、天生不稳定、零优势。
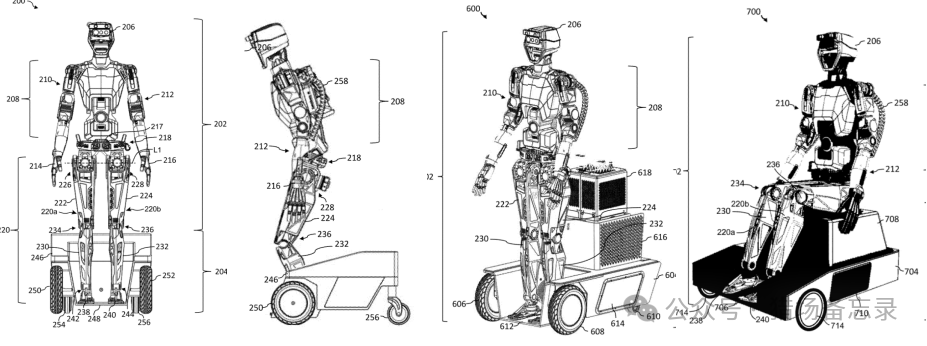
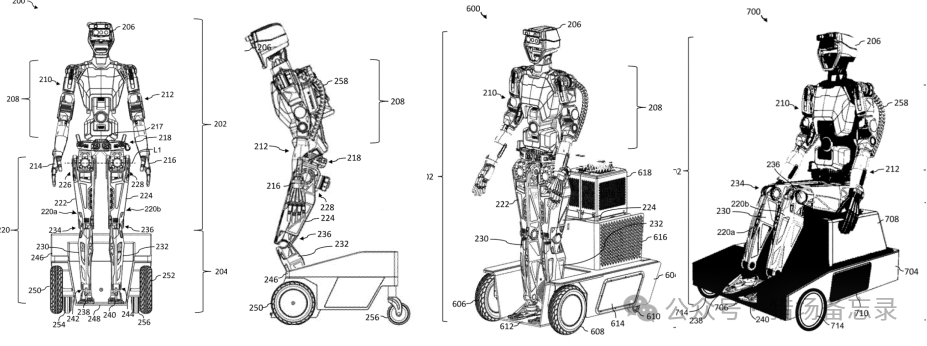
图片来源:US 2024/0109612 A1
【Sanctuary AI】在2023年9月26日提交了一项专利申请,于2024年4月4日公开,专利名称为“用于类人机器人的系统、装置和方法”。
该专利号为 US 2024/0109612 A1 ,专利围绕双足机器人及其下方移动基座,大概意思是双足机器人的脚固定在移动基座平台上,机器人通过移动基座移动,机器人身体可以执行各种动作。
人形机器人目前根据移动方式不同,可分为双足和轮式;
虽然目前人形机器人本体公司旗下产品移动方式有所不同,甚至有不少双足人形机器人公司接连推出轮式仿生机器人;业内也有两种声音,先做轮式然后逐步切入双足和直接专注于双足,究其原因则是双足控制算法现阶段不成熟,轮式相较于双足,更容易完成商业化落地;但行业内不争的共识是:双足人形是未来发展的终极形态。
那么将两种样式融合在一起呢?
来了!
9月24日,腾讯Robotics X实验室发布旗下最新研发成果人居环境机器人“5号”(The Five,小五),采用四腿轮足复合设计,兼具双足和轮式双重优势,解锁人形机器人移动新方式。
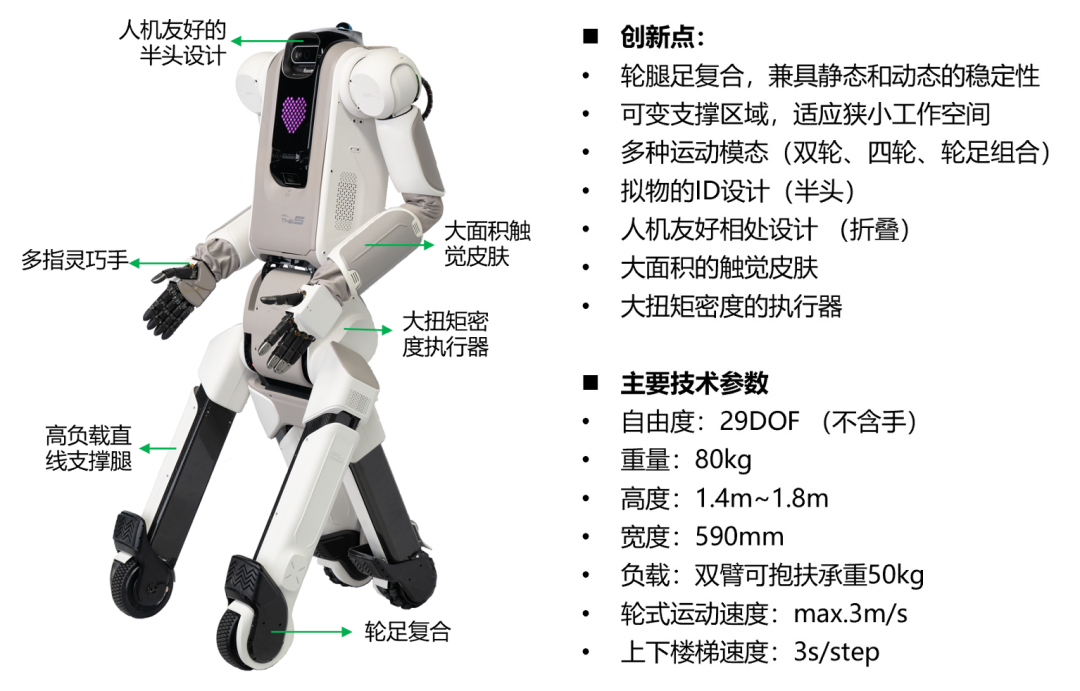
机器人The Five采用四条直线腿和轮足复合的设计,既保持了足式机器人的越障能力,也保持了轮式机器人运行的效率,让机器人在平地上有更快的速度;在平地上,可以切换四轮模态、两轮模态运动;在不平整地形上,使用可伸缩的直线腿配合主动力控,实现弹簧悬挂的效果,从而保证上半身平稳;在楼梯和马路牙子等场景,可以采用轮足复合的形式,顺利走过去。
|
|
|
|
从展示视频来看,机器人The Five更多依赖于轮式状态,结构设计上将传统轮式仿生机器人轮式底盘+双腿并成一条腿样式,更改为底部带滑轮的四条腿样式;交叉腿的设计且每条直线腿可以单独伸长缩短,因此可根据不同的作业空间需求,调整支撑高度,从而实现“上摸高、下摸地”的广阔作业空间,但从视频展示来看,这种方式有克服双足机器人腿部弯曲导致本体稳定性不足问题,但上下高度调节幅度有限,不如双腿并成一条腿这类轮式仿生机器人上下调节幅度,如银河通用G1、星尘智能S1。
整体而言,机器人The Five这种四条直线腿和轮足复合的设计,可以理解介于轮式到双足进化的早期状态。
标志性轮式仿生机器人:
| 银河通用G1 | 星尘智能S1 |
|
|
|
|
|
|


银河通用机器人创始人兼CTO王鹤教授曾多次表示:人形是未来发展的终极形态;目前全球尚未实现让机器人泛化地弯腰抓取地面点而不摔倒的技术;若依赖腿部实现此技能,未来一两年内,机器人在工作场景中遇到地面掉落物品时,将无法自行处理,需人工介入;因此,现阶段直接模仿人类,将机器人设计成双足并不是最优解,而是要逐步渐进式发展。
虽然双足形态是现阶段大多数人形机器人企业旗下人形机器人产品形态(完全拟人形态),但出于商业化考虑,已有多家双足玩家推出轮式机器人产品。
从左至右依次为:乐聚、智元、科大讯飞、星动纪元、北京具身智能创新中心公司的轮式仿生机器人
当然也有完全反对双足样式玩家,国外知名双足人形机器人企业Sanctuary AI创始人Geordie Rose接受采访时表示:双足人形机器人是愚蠢的,任何支持他们的人都没有花超过5分钟思考这个问题,几乎所有工作都更适合在轮子的环境中完成;并表示,双足是愚蠢的、严重限制能力、天生不稳定、零优势。
轮式仿生机器人相较于双足机器人,有诸多优势(不分展示):
1、稳定性高,更容易商业化
2024世界机器人现场,轮式仿生机器人稳定性优势一览无余;双足人形机器人产品,不运动时,都通过绳索悬挂在钢架上保持固定(并有不少人形机器人即使在行走过程中,也需要绳索牵引,以防摔倒),而轮式双臂机器人因拥有天然底座可保证其时刻稳定。
抛开AI能力,稳定性是轮式仿生机器人会优先于足式机器人落地的主要原因。
2、结构简单且成本低
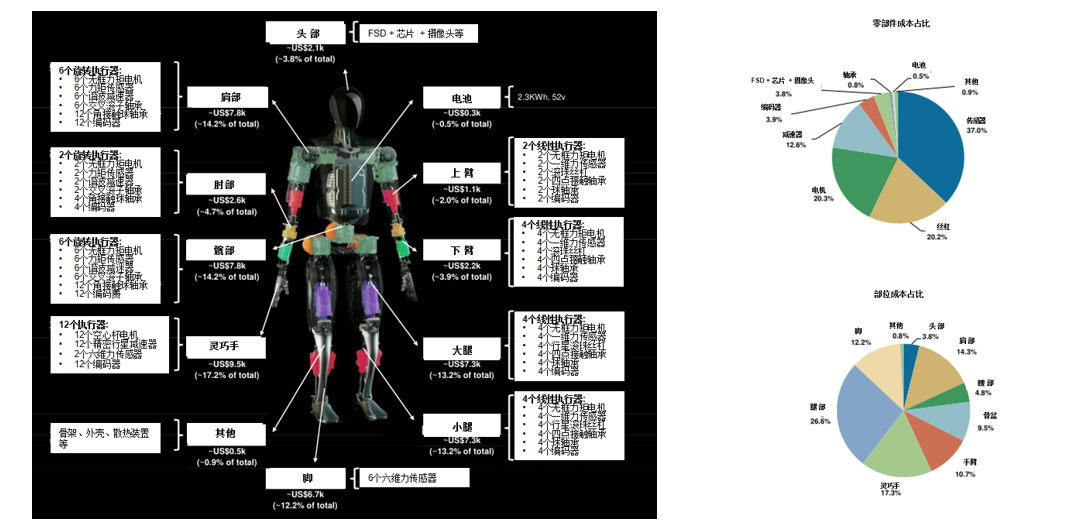
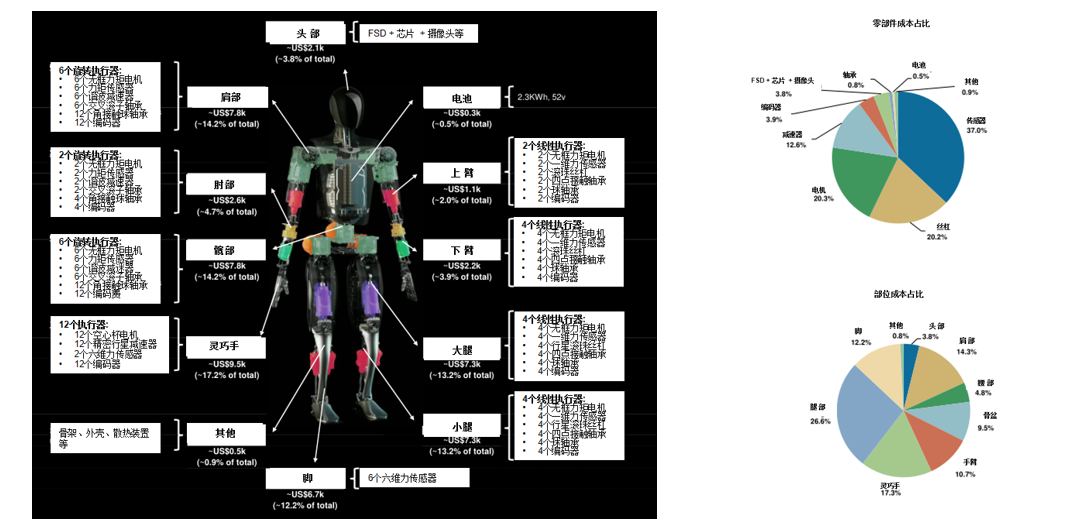
在成本上,双足是轮式底盘的多倍;根据摩根士丹利最新梳理特斯拉Optimus Gen2总的Bom成本(不含软件),腿部成本占总成本约26.6%、脚占12.2%;
从构型上,轮式比双足简单许多,轮式机器人不涉及重心转移,只需要做一个移动平台,而且以往有很多现有产品参考(移动底盘);通常来讲,做双足机器人起家的机器人企业很容易造出轮式机器人,而做轮式机器人起家的却比较难造出双足机器人。
人形机器人根据移动方式不同,可分为双足和轮式。
双足是现阶段大多数人形机器人企业旗下人形机器人产品形态(完全拟人形态);行业内另外一种声音:现阶段腿部控制能力不足,目前直接模仿人类,设计成双足并不是最优解,而是要逐步渐进式发展,先设计成更容易落地的轮式;当然还有另外一种声音,移动方式不是重点,重点是灵巧手,并因此涌现出一批以灵巧手为卖点的人形机器人企业(戴盟机器人等),有关灵巧手,会在其他文章进行梳理。
【星海图】联合创始人许华哲曾表示:双足的算法研究有其价值,但从商业落地和效益产生的角度来看,应优先考虑技术的实际应用。在室内环境中,除了台阶外,双足行走的优势并不明显,因此不必过分投入在腿部算法的开发上。
【方舟源启】的创始人张鑫亮曾表示:在需求落地不明朗的时代下,具身智能机器人的核心竞争力在于操作能力而非行走能力,上半身的智能决策能力比下半身的移动性能更为关键;结合人形机器人和 AI 大模型,专注于上半身的开发,是更符合资源和能力的策略;
国内人形机器人初创企业,知名度最高的轮式仿生机器人应该是【银河通用】]轮式仿生机器人Galbot G1。
Galbot G1在刚落寞的2024世界机器人大会上大放异彩;据官方介绍:Galbot 在 WRC 现场五天连续工作超45小时,服务现场超2000名观众,共执行超 10,000 项任务,任务成功率超过98%,展现了在商业、工业等场景强大且稳定的应用能力。

银河通用机器人创始人兼CTO王鹤教授曾在2024年6月15日北京智源大会上表示:人形是未来发展的终极形态;目前全球尚未实现让机器人泛化地弯腰抓取地面点而不摔倒的技术;这些技能的缺失主要源于腿部控制能力的不足,以及在安全性和稳定性方面的挑战;若依赖腿部实现此技能,未来一两年内,机器人在工作场景中遇到地面掉落物品时,将无法自行处理,需人工介入;因此,现阶段直接模仿人类,将机器人设计成双足并不是最优解,而是要逐步渐进式发展。
目前国内已涌现出一批走轮式路线的人形机器人本体企业(如:银河通用、星海图、星尘智能、帕西尼感知等);随着诸多人形机器人本体厂商亮相2024世界机器人大会,才发现诸多双足人形机器人本体企业,已默默研发出了轮式双臂仿生机器人。

从左至右依次为:乐聚、智元、科大讯飞、星动纪元、北京具身智能创新中心公司的轮式仿生机器人
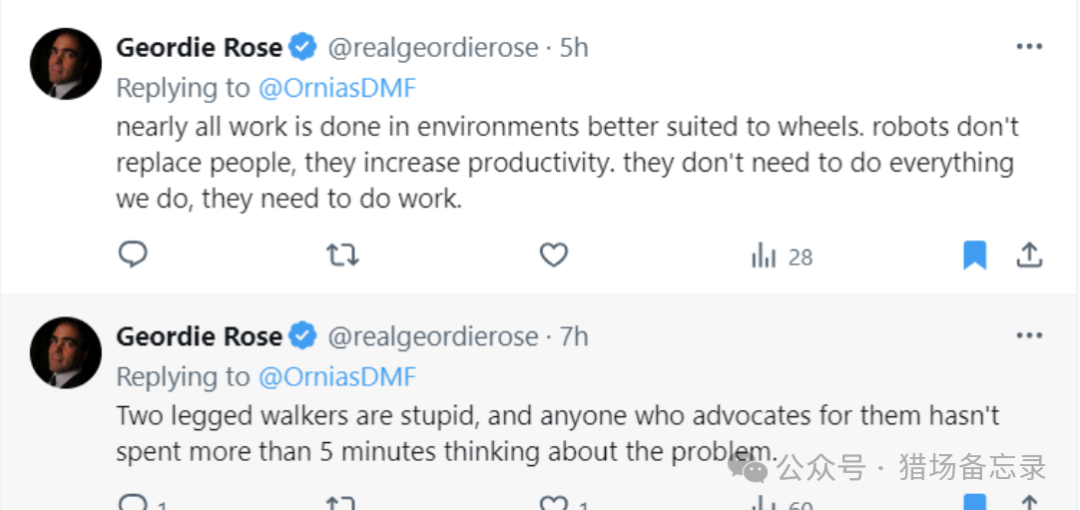
国外知名双足人形机器人企业Sanctuary AI创始人Geordie Rose近期接受采访时表示:双足人形机器人是愚蠢的,任何支持他们的人都没有花超过5分钟思考这个问题;几乎所有工作都更适合在轮子的环境中完成;机器人不会取代人,它们提高了生产力;它们不需要做我们做的一切,它们需要做工作;并表示:将人形机器人设计成双足是愚蠢的、严重限制能力、天生不稳定、零优势。
针对该文章,网友回复积极,居然清一色认为轮式是现阶段最优解:(以下是网友部分留言)
轮式双臂机器人真正意义上并不算是人形机器人,毕竟ABB双臂机器人YUMI早已上市,并能出色完成诸多精细化任务。
轮式双臂机器人更多是加了一个轮子底盘的双臂机器人,市面上有诸多产品,被称为复合机器人;目前重点是这些人形机器人本体厂商所推出的轮式仿生机器人是否真的具备泛化能力;字节跳动有内部组建机器人团队,产品就是复合机器人(轮式单/双臂机器人)。
轮式仿生机器人相较于双足机器人,难度更低一些,更容易落地一些,有诸多优势:
1、稳定性高,更容易商业化
2024世界机器人现场,轮式仿生机器人稳定性优势一览无余;双足人形机器人产品,不运动时,都通过绳索悬挂在钢架上保持固定(并有不少人形机器人即使在行走过程中,也需要绳索牵引,以防摔倒),而轮式双臂机器人因拥有天然底座可保证其时刻稳定。
抛开AI能力,稳定性是轮式仿生机器人会优先于足式机器人落地的主要原因。

2、结构简单且成本低
在成本上,双足是轮式底盘的多倍;根据摩根士丹利最新梳理特斯拉Optimus Gen2总的Bom成本(不含软件),腿部成本占总成本约26.6%、脚占12.2%;
从构型上,轮式比双足简单许多,轮式机器人不涉及重心转移,只需要做一个移动平台,而且以往有很多现有产品参考(移动底盘);通常来讲,做双足机器人起家的机器人企业很容易造出轮式机器人,而做轮式机器人起家的却比较难造出双足机器人(如:国外知名人形机器人企业1X Technologies,旗下轮式机器人EVE都量产交付了,双足机器人NEO还没有问世)
3、续航能力强
2024世界机器人现场,不少双足机器人需要经常性充电或者时刻连着长长电线;在续航上,目前人形机器人续航能力多在1.5小时-5小时区间,而轮式机器人的续航能力一般都大于5小时,而且轮式机器人底座为存放大容量电池提供了极佳场所,而且完全不影响外观。
近日,知名人形机器人企业Sanctuary AI(旗下双足人形机器人产品Phoenix已更新至第七代)创始人Geordie Rose近期接受采访时表示:Sanctuary AI将很快部署第一批1000台人形机器人。
值的注意的是,特斯拉2024年股东大会,马斯克表示:计划在2025年实现Optimus的限量生产,并预测,至2025年底将有超过1000台,或者几千台Optimus机器人将在特斯拉工厂各个岗位工作;7月22日(美东时间),马斯克在X平台上表示:公司计划于明年实现Optimus机器人的限量生产,但初期产量较低(可能意味着2025年产量应该远低于原计划1000台),仅供特斯拉内部使用,预计在2026年实现大规模生产,以供其他公司使用。
真是应了小编以往的话语,特斯拉旗下产品(model系列和Optimus)从不对标,但一直被对标;看来1000台将是后续人形机器人企业交付量的起点了。
回到Sanctuary AI,创始人Geordie Rose在X平台回复网友时,表示:双足人形机器人是愚蠢的,任何支持他们的人都没有花超过5分钟思考这个问题;几乎所有工作都更适合在轮子的环境中完成;机器人不会取代人,它们提高了生产力;它们不需要做我们做的一切,它们需要做工作;并表示:将人形机器人设计成双足是愚蠢的、严重限制能力、天生不稳定、零优势。
图片来源:US 2024/0109612 A1
【Sanctuary AI】在2023年9月26日提交了一项专利申请,于2024年4月4日公开,专利名称为“用于类人机器人的系统、装置和方法”。
该专利号为 US 2024/0109612 A1 ,专利围绕双足机器人及其下方移动基座,大概意思是双足机器人的脚固定在移动基座平台上,机器人通过移动基座移动,机器人身体可以执行各种动作。
回到创始人Geordie Rose采访时表示:Sanctuary AI将很快部署第一批1000台人形机器人;小编认为大概率将是轮式仿生机器人,而不是双足。
Sanctuary AI转走轮式路线,其实不令人奇怪,Phoenix已更新至第七代,但一直没展示其行走能力,都是展示其上半身肢体能力;仅仅第六代在官网宣传和英伟达2024年GTC大会有对外展示其双足形态。
目前人形机器人产品分两种:双足和轮式;双足是现阶段大多数人形机器人企业旗下人形机器人产品形态(完全拟人形态);行业内另外一种声音:现阶段腿部控制能力不足,目前直接模仿人类,设计成双足并不是最优解,而是要逐步渐进式发展,先设计成更容易落地的轮式。
整体而言,轮式要比双足好落地;具体优势,各家根据自身产品各有说辞;知名人形机器人企业1X Technologies旗下轮式机器人EVE早已实现批量化交付,现阶段着重发力旗下双足人形机器人NEO,并在本月新聘Jorge Milburn、Per Selvaag和Dar Sleeper三位专家,分别担任销售副总裁、设计副总裁、增长副总裁,为后续旗下人形机器人NEO上市做准备。
接下来我们聊一下Sanctuary AI旗下机器人商业化可能性:
公司层面:
Sanctuary AI成立于2018年,总部位于加拿大温哥华,目前总融资额超过 1.4 亿美元(本月7月3日,完成最新一次融资,来自于 BDC Capital和 InBC基金)
产品及技术层面:
Sanctuary AI旗下人形机器人产品Phoenix已更新至第七代(第六代,被时代周刊评为2023年的最佳发明),搭载自研Carbon人工智能系统赋予 Phoenix 类人智能及泛化能力,现阶段已可以自主工作,其手臂及灵巧手灵敏度走在行业前列;
今年5月,与Microsoft建立合作关系,加速通用机器人的AI研究和开发;公司官网表示:此次合作将在我们实现“大型行为模型”(LBM) 方面发挥作用,该模型通过使系统能够理解和学习现实世界的经验,将AI置于物理世界中。此外,Sanctuary AI也与英伟达建立合作关系。
商业化进展:
-
2023年3月,公司官宣与加拿大轮胎公司 (CTC) 合作,并在CTC完成了首个通用人形机器人商业部署,在CTC旗下商店进行的为期一周的试点;
-
2024年4月,公司宣布与麦格纳国际公司建立战略合作伙伴关系;通过扩大合作,该公司计划为麦格纳的汽车零部件工厂配备通用人工智能机器人;计划明年将 Phoenix 机器人部署到麦格纳工厂的实际制造环境中;
硬件设施:
与麦格纳国际公司建立战略合作,公司后续计划让麦格纳在未来根据合同批量化生产 Phoenix 机器人,创始人Geordie Rose曾明确表示,后续不会搭建工厂生产,专注产品研发,生产会有合作伙伴负责(与外部制造商合作)。

















 1771
1771

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









