







迄今为止,轮子一般是移动机器人学和人造交通车辆中最流行的运动机构。它可达到很高的效率,
如图所示,

而且用比较简单的机械就可实现它的制作。
另外,在轮式机器人设计中,平衡通常不是一个研究问题。
因为在所有时间里,轮式机器人一般都被设计成在任何时间里所有轮子均与地接触。因而,3个轮子就足以保证稳定平衡。虽然我们将在下面看到,两轮机器人也可以稳定。
如果使用的轮子多于3个,当机器人碰到崎岖不平的地形时,就需要一个悬挂系统以使所有轮子保持与地面接触。轮式机器人研究倾向于把重点放在牵引、稳定性、机动性及控制问题,而不是担心平衡。为覆盖所有预期的地形,机器人的轮子能否提供足够的牵引力和稳定性?机器人的轮子结构能对机器人的速度进行有级的控制吗?
轮子运动:设计空间
正如将要看到的,当我们考虑移动机器人运动的可能技术时,可能的轮子结构有很大的空间。因为有很多数目不同的轮子类型,各有其特定的优点和缺点,故我们从详细讨论轮子开始,然后来检验为移动机器人传送特定运动形式的完整的轮子构造。
轮子的设计
有四种主要的轮子类型,如图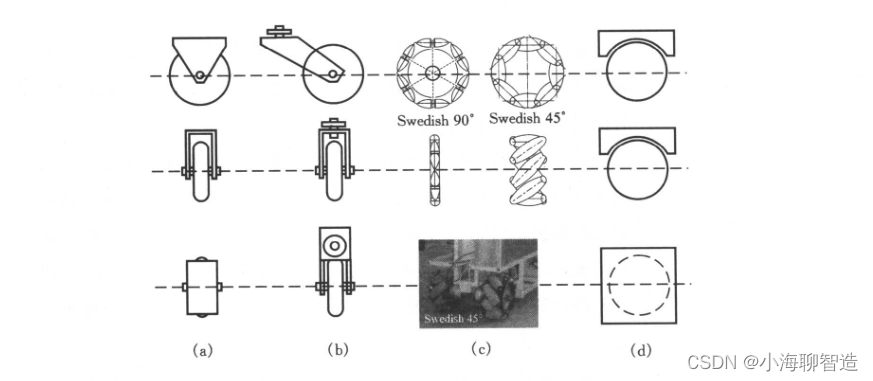
所示。
四种基本的轮子类型:
(a)标准轮:2个自由度,围绕轮轴(电动的)和图
2.19接触点转动;
(b)小脚轮:2个自由度,围绕偏移的操纵接合点旋转;
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 9558
9558

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











