






前言
通常我们讲,自动驾驶根据自车状态和周边环境的信息进行规划,然后将规划结果交给控制模块执行。很容易理解规划模块的输入应该是自车状态和周边环境,输出应该是规划出的可执行轨迹,但是,往更深的层面挖掘,自车状态和周边环境具体包括哪些物理信息,这些物理信息又该如何分类,如何用程序语言描述,另外可执行轨迹又该如何设计,这貌似是个非常细节、严谨的环节,那么我们来看看 Apollo 是如何处理的,随笔记录一下,分享给大家。
参考资料:
- https://paul.pub/apollo-planning/
- https://github.com/daohu527/Dig-into-Apollo#ledger-%E7%9B%AE%E5%BD%95
- https://github.com/ApolloAuto/apollo/tree/master
正文
我们先看下Apollo的数据流向:
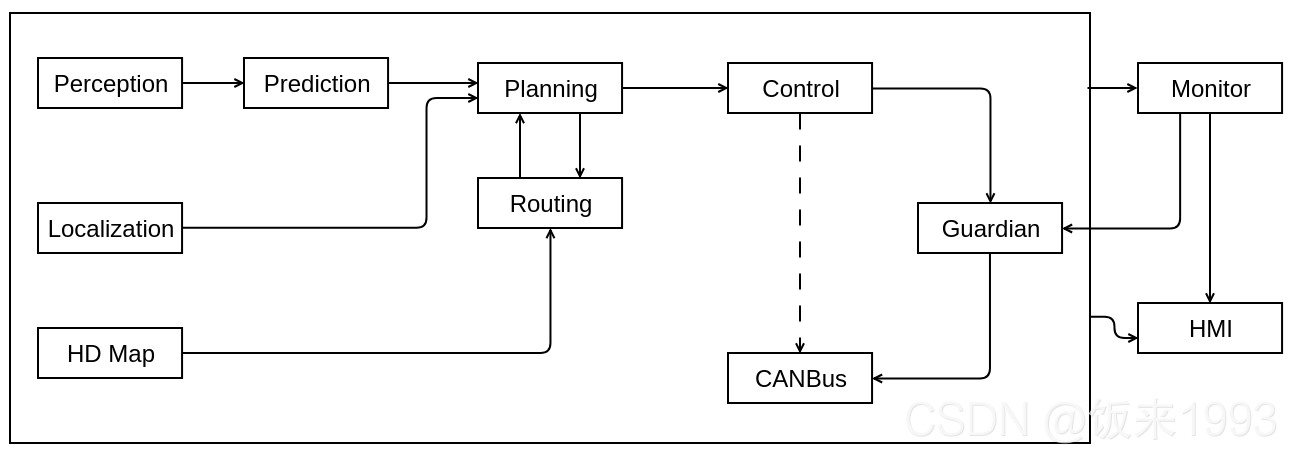
可以看到规划(planning)模块的上游是Localization, Prediction, Routing模块,而下游是Control模块。Routing模块先规划出一条导航线路,然后Planning模块根据这条线路做局部优化,如果Planning模块发现短期规划的线路行不通(比如前面修路,或者错过了路口),会触发Routing模块重新规划线路,因此这两个模块的数据流是双向的。 Planning模块的输入在"planning_component.h"中,接口如下:
bool Proc(const std::shared_ptr<prediction::PredictionObstacles>&
prediction_obstacles,
const std::shared_ptr<canbus::Chassis>& chassis,
const std::shared_ptr<localization::LocalizationEstimate>&
localization_estimate) override;输入参数为:
-
预测的障碍物信息(prediction_obstacles)
-
车辆底盘(chassis)信息(车辆的速度,加速度,航向角等信息)
-
车辆当前位置(localization_estimate)
实际上还有高精度地图信息,不在参数中传入,而是在函数中直接读取的。
另外,在"planning_component.h"中还定义了一系列 reader,用于读取目标 topic 中的信息,如下所示:
private:
std::shared_ptr<cyber::Reader<perception::TrafficLightDetection>>
traffic_light_reader_;
std::shared_ptr<cyber::Reader<routing::RoutingResponse>> routing_reader_;
std::shared_ptr<cyber::Reader<planning::PadMessage>> pad_msg_reader_;
std::shared_ptr<cyber::Reader<relative_map::MapMsg>> relative_map_reader_;
std::shared_ptr<cyber::Reader<storytelling::Stories>> story_telling_reader_;这些信息被读取后最终会整合至 LocalView 中,其为一个结构体,包含了规划所需要的全部输入信息,如下所示:
/**
* @struct local_view
* @brief LocalView contains all necessary data as planning input
*/
struct LocalView {
std::shared_ptr<prediction::PredictionObstacles> prediction_obstacles;
std::shared_ptr<canbus::Chassis> chassis;
std::shared_ptr<localization::LocalizationEstimate> localization_estimate;
std::shared_ptr<perception::TrafficLightDetection> traffic_light;
std::shared_ptr<routing::RoutingResponse> routing;
std::shared_ptr<relative_map::MapMsg> relative_map;
std::shared_ptr<PadMessage> pad_msg;
std::shared_ptr<storytelling::Stories> stories;
};Planning模块的输出结果主要包含3个,如下所示:
std::shared_ptr<cyber::Writer<ADCTrajectory>> planning_writer_;
std::shared_ptr<cyber::Writer<routing::RoutingRequest>> rerouting_writer_;
std::shared_ptr<cyber::Writer<PlanningLearningData>>
planning_learning_data_writer_;下面针对以上数据结构分别展开分析,Apollo 中采用了 Protobuf ,其文件格式是 .proto,在编译时会生成对应的 .h 和 .cpp 文件,包含一些默认的函数接口,主要是用来存取数据的,没有其他的逻辑运算。
下面的部分会略显无聊,因为我搬运了大量源码。最后有我自己的一些想法,有兴趣者可来赐教或探讨。
PredictionObstacles
这部分为障碍物信息,障碍物信息源于 perception 模块,其输出的 PerceptionObstacles 作为 prediction 模块的输入,经过加工处理,丰富了障碍物的预测信息,然后输出至 planning 模块。
PerceptionObstacle
注意区分 PerceptionObstacle 和 PerceptionObstacles,Apollo 中未加 s 的消息格式通常是基本的结构,表征单体,加了 s 的消息格式通常是单体的集合,可以由任意个单体构成,另外会有额外的补充信息。
这里暂且只关注 PerceptionObstacle,是由 perception 模块生成的消息类型,其包含了单体障碍物的全部信息,其中可能包含一些预留信息,如下所示:
message PerceptionObstacle {
optional int32 id = 1; // obstacle ID.
// obstacle position in the world coordinate system.
optional apollo.common.Point3D position = 2;
optional double theta = 3; // heading in the world coordinate system.
optional apollo.common.Point3D velocity = 4; // obstacle velocity.
// Size of obstacle bounding box.
optional double length = 5; // obstacle length.
optional double width = 6; // obstacle width.
optional double height = 7; // obstacle height.
repeated apollo.common.Point3D polygon_point = 8; // obstacle corner points.
// duration of an obstacle since detection in s.
optional double tracking_time = 9;
enum Type {
UNKNOWN = 0;
UNKNOWN_MOVABLE = 1;
UNKNOWN_UNMOVABLE = 2;
PEDESTRIAN = 3; // Pedestrian, usually determined by moving behavior.
BICYCLE = 4; // bike, motor bike
VEHICLE = 5; // Passenger car or truck.
};
optional Type type = 10; // obstacle type
optional double timestamp = 11; // GPS time in seconds.
// Just for offline debugging, will not fill this field on board.
// Format: [x0, y0, z0, x1, y1, z1...]
repeated double point_cloud = 12 [packed = true];
optional double confidence = 13 [deprecated = true];
enum ConfidenceType {
CONFIDENCE_UNKNOWN = 0;
CONFIDENCE_CNN = 1;
CONFIDENCE_RADAR = 2;
};
optional ConfidenceType confidence_type = 14 [deprecated = true];
// trajectory of object.
repeated apollo.common.Point3D drops = 15 [deprecated = true];
// The following fields are new added in Apollo 4.0
optional apollo.common.Point3D acceleration = 16; // obstacle acceleration
// a stable obstacle point in the world coordinate system
// position defined above is the obstacle bounding box ground center
optional apollo.common.Point3D anchor_point = 17; // 这个点的物理意义?
optional BBox2D bbox2d = 18;
enum SubType {
ST_UNKNOWN = 0;
ST_UNKNOWN_MOVABLE = 1;
ST_UNKNOWN_UNMOVABLE = 2;
ST_CAR = 3;
ST_VAN = 4;
ST_TRUCK = 5;
ST_BUS = 6;
ST_CYCLIST = 7;
ST_MOTORCYCLIST = 8;
ST_TRICYCLIST = 9;
ST_PEDESTRIAN = 10;
ST_TRAFFICCONE = 11;
};
optional SubType sub_type = 19; // obstacle sub_type
repeated SensorMeasurement measurements = 20; // sensor measurements
// orthogonal distance between obstacle lowest point and ground plane
optional double height_above_ground = 21 [default = nan];
// position covariance which is a row-majored 3x3 matrix
repeated double position_covariance = 22 [packed = true]; // 协方差矩阵,以行为主,3*3
// velocity covariance which is a row-majored 3x3 matrix
repeated double velocity_covariance = 23 [packed = true];
// acceleration covariance which is a row-majored 3x3 matrix
repeated double acceleration_covariance = 24 [packed = true];
// lights of vehicles
optional LightStatus light_status = 25;
// Debug Message
optional DebugMessage msg = 26;
enum Source {
HOST_VEHICLE = 0;
V2X = 1;
};
optional Source source = 27 [default = HOST_VEHICLE];
optional V2XInformation v2x_info = 28;
}其中,SensorMeasurement 表示观测到该障碍物的所有传感器的测量信息,其消息格式如下:
message SensorMeasurement {
optional string sensor_id = 1;
optional int32 id = 2;
optional apollo.common.Point3D position = 3;
optional double theta = 4;
optional double length = 5;
optional double width = 6;
optional double height = 7;
optional apollo.common.Point3D velocity = 8;
optional PerceptionObstacle.Type type = 9;
optional PerceptionObstacle.SubType sub_type = 10;
optional double timestamp = 11;
optional BBox2D box = 12; // only for camera measurements
}BBox2D 表示在相机视图上包络障碍物的矩形框,其消息格式如下:
message BBox2D {
optional double xmin = 1; // in pixels.
optional double ymin = 2; // in pixels.
optional double xmax = 3; // in pixels.
optional double ymax = 4; // in pixels.
}LightStatus 表示障碍物的刹车灯和转向灯信息,其消息格式如下:
message LightStatus {
optional double brake_visible = 1;
optional double brake_switch_on = 2;
optional double left_turn_visible = 3;
optional double left_turn_switch_on = 4;
optional double right_turn_visible = 5;
optional double right_turn_switch_on = 6;
}DebugMessage 表示障碍物的轨迹,此处应该是观测轨迹,不包含预测信息,其消息格式如下:
message DebugMessage {
// can have multiple trajectories per obstacle
repeated Trajectory trajectory = 1;
}V2XInformation 的消息格式如下:
message V2XInformation {
enum V2XType {
NONE = 0;
ZOMBIES_CAR = 1;
BLIND_ZONE = 2;
};
repeated V2XType v2x_type = 1;
}PredictionObstacle
注意此处未加 s,为经过 prediction 模块加工后的障碍物信息,增加了预测周期、障碍物轨迹、障碍物意图、历史特征序列等信息,具体如下所示:
message PredictionObstacle {
optional apollo.perception.PerceptionObstacle perception_obstacle = 1;
optional double timestamp = 2; // GPS time in seconds
// the length of the time for this prediction (e.g. 10s)
optional double predicted_period = 3;
// can have multiple trajectories per obstacle
repeated Trajectory trajectory = 4;
// estimated obstacle intent
optional ObstacleIntent intent = 5;
optional ObstaclePriority priority = 6;
optional bool is_static = 7 [default = false];
// Feature history latest -> earliest sequence
repeated Feature feature = 8;
}其中 ObstacleIntent 表示估计的障碍物的意图,具体如下所示:
// estimated obstacle intent
message ObstacleIntent {
enum Type {
UNKNOWN = 0;
STOP = 1;
STATIONARY = 2;
MOVING = 3;
CHANGE_LANE = 4;
LOW_ACCELERATION = 5;
HIGH_ACCELERATION = 6;
LOW_DECELERATION = 7;
HIGH_DECELERATION = 8;
}
optional Type type = 1 [default = UNKNOWN];
}Feature 表示障碍物的特征,其修饰符为 repeated,表明对于同一障碍物,存储了历史特征,个人感觉这个 Feature 类型的消息涵盖了 PerceptionObstacle 的信息,但是这两者在 PredictionObstacle 中是共存的,不知道是否冗余,Feature 消息的具体格式如下:
message Feature {
// Obstacle ID
optional int32 id = 1;
// Obstacle features
repeated apollo.common.Point3D polygon_point = 30;
optional apollo.common.Point3D position = 2;
optional apollo.common.Point3D front_position = 27;
optional apollo.common.Point3D velocity = 3;
optional apollo.common.Point3D raw_velocity = 28; // from perception
optional apollo.common.Point3D acceleration = 4;
optional double velocity_heading = 5;
optional double speed = 6;
optional double acc = 7;
optional double theta = 8;
optional double length = 9;
optional double width = 10;
optional double height = 11;
optional double tracking_time = 12;
optional double timestamp = 13;
// Obstacle type-specific features
optional Lane lane = 14;
optional JunctionFeature junction_feature = 26;
// Obstacle tracked features
optional apollo.common.Point3D t_position = 16;
optional apollo.common.Point3D t_velocity = 17 [deprecated = true];
optional double t_velocity_heading = 18 [deprecated = true];
optional double t_speed = 19 [deprecated = true];
optional apollo.common.Point3D t_acceleration = 20 [deprecated = true];
optional double t_acc = 21 [deprecated = true];
optional bool is_still = 22 [default = false];
optional apollo.perception.PerceptionObstacle.Type type = 23;
optional double label_update_time_delta = 24;
optional ObstaclePriority priority = 25;
optional bool is_near_junction = 29 [default = false];
// Obstacle ground-truth labels:
repeated PredictionTrajectoryPoint future_trajectory_points = 31;
// Obstacle short-term predicted trajectory points
repeated apollo.common.TrajectoryPoint
short_term_predicted_trajectory_points = 32;
// Obstacle predicted trajectories
repeated Trajectory predicted_trajectory = 33;
// ADC trajectory at the same frame
repeated apollo.common.TrajectoryPoint adc_trajectory_point = 34;
// Surrounding lanes
repeated string surrounding_lane_id = 35;
repeated string within_lane_id = 36;
}PredictionObstacles
前面做的两种消息类型的铺垫,是为了引出最后这种 PredictionObstacles 消息类型,根据其命名规则就很容易想到它是 PredictionObstacle 的复数形式,也就是说包含了当前帧中所有的障碍物信息,当然也可能是0个(没有障碍物),先看其消息格式:
message PredictionObstacles {
// timestamp is included in header
optional apollo.common.Header header = 1;
// make prediction for multiple obstacles
repeated PredictionObstacle prediction_obstacle = 2;
// perception error code
optional apollo.common.ErrorCode perception_error_code = 3;
// start timestamp
optional double start_timestamp = 4;
// end timestamp
optional double end_timestamp = 5;
// self driving car intent
optional Intent intent = 6;
// Scenario
optional Scenario scenario = 7;
}其中,ErrorCode 的信息如下:
// Error codes enum for API's categorized by modules.
enum ErrorCode {
// No error, returns on success.
OK = 0;
// Control module error codes start from here.
CONTROL_ERROR = 1000;
CONTROL_INIT_ERROR = 1001;
CONTROL_COMPUTE_ERROR = 1002;
CONTROL_ESTOP_ERROR = 1003;
PERFECT_CONTROL_ERROR = 1004;
// Canbus module error codes start from here.
CANBUS_ERROR = 2000;
CAN_CLIENT_ERROR_BASE = 2100;
CAN_CLIENT_ERROR_OPEN_DEVICE_FAILED = 2101;
CAN_CLIENT_ERROR_FRAME_NUM = 2102;
CAN_CLIENT_ERROR_SEND_FAILED = 2103;
CAN_CLIENT_ERROR_RECV_FAILED = 2104;
// Localization module error codes start from here.
LOCALIZATION_ERROR = 3000;
LOCALIZATION_ERROR_MSG = 3100;
LOCALIZATION_ERROR_LIDAR = 3200;
LOCALIZATION_ERROR_INTEG = 3300;
LOCALIZATION_ERROR_GNSS = 3400;
// Perception module error codes start from here.
PERCEPTION_ERROR = 4000;
PERCEPTION_ERROR_TF = 4001;
PERCEPTION_ERROR_PROCESS = 4002;
PERCEPTION_FATAL = 4003;
PERCEPTION_ERROR_NONE = 4004;
PERCEPTION_ERROR_UNKNOWN = 4005;
// Prediction module error codes start from here.
PREDICTION_ERROR = 5000;
// Planning module error codes start from here
PLANNING_ERROR = 6000;
PLANNING_ERROR_NOT_READY = 6001;
// HDMap module error codes start from here
HDMAP_DATA_ERROR = 7000;
// Routing module error codes
ROUTING_ERROR = 8000;
ROUTING_ERROR_REQUEST = 8001;
ROUTING_ERROR_RESPONSE = 8002;
ROUTING_ERROR_NOT_READY = 8003;
// Indicates an input has been exhausted.
END_OF_INPUT = 9000;
// HTTP request error codes.
HTTP_LOGIC_ERROR = 10000;
HTTP_RUNTIME_ERROR = 10001;
// Relative Map error codes.
RELATIVE_MAP_ERROR = 11000; // general relative map error code
RELATIVE_MAP_NOT_READY = 11001;
// Driver error codes.
DRIVER_ERROR_GNSS = 12000;
DRIVER_ERROR_VELODYNE = 13000;
// Storytelling error codes.
STORYTELLING_ERROR = 14000;
}Intent 表示自车的意图,如下:
// self driving car intent
message Intent {
enum Type {
UNKNOWN = 0;
STOP = 1;
CRUISE = 2;
CHANGE_LANE = 3;
}
optional Type type = 1 [default = UNKNOWN];
}Scenario 表示场景,如下:
message Scenario {
enum Type {
UNKNOWN = 0;
CRUISE = 1000;
CRUISE_URBAN = 1001;
CRUISE_HIGHWAY = 1002;
JUNCTION = 2000;
JUNCTION_TRAFFIC_LIGHT = 2001;
JUNCTION_STOP_SIGN = 2002;
}
optional Type type = 1 [default = UNKNOWN];
optional string junction_id = 2;
}至此,planning 模块的输入之一 PredictionObstacles 的消息类型分析完毕,下面分析同样来自 perception 模块的 TraficLightDetection。
TraficLightDetection
这个消息类型比 PredictionObstacles 要简单的多,主要为交通灯的信息,如下所示:
message TrafficLightDetection {
optional apollo.common.Header header = 2;
repeated TrafficLight traffic_light = 1;
optional TrafficLightDebug traffic_light_debug = 3;
optional bool contain_lights = 4;
enum CameraID {
CAMERA_FRONT_LONG = 0;
CAMERA_FRONT_NARROW = 1;
CAMERA_FRONT_SHORT = 2;
CAMERA_FRONT_WIDE = 3;
};
optional CameraID camera_id = 5;
}其中 TrafficLight 表示交通灯的基本信息,其中包括交通灯的颜色、可信度、已经跟踪的时间、是否闪烁以及剩余时间(通过v2x才能获取的信息),但是个人感觉还应该补充交通灯的 type,以区分信号灯和信号指示灯,或许在其他地方有体现,暂时保留该意见,如下所示:
message TrafficLight {
enum Color {
UNKNOWN = 0;
RED = 1;
YELLOW = 2;
GREEN = 3;
BLACK = 4;
};
optional Color color = 1;
// Traffic light string-ID in the map data.
optional string id = 2;
// How confidence about the detected results, between 0 and 1.
optional double confidence = 3 [default = 1.0];
// Duration of the traffic light since detected.
optional double tracking_time = 4;
// Is traffic blinking
optional bool blink = 5;
// v2x traffic light remaining time.
optional double remaining_time = 6;
}另外 TrafficLightDebug 看起来好像是图片处理的过程信息,这个地方暂时保留,其信息如下:
message TrafficLightDebug {
optional TrafficLightBox cropbox = 1;
repeated TrafficLightBox box = 2;
optional int32 signal_num = 3;
optional int32 valid_pos = 4;
optional double ts_diff_pos = 5;
optional double ts_diff_sys = 6;
optional int32 project_error = 7;
optional double distance_to_stop_line = 8;
optional int32 camera_id = 9 [deprecated = true];
repeated TrafficLightBox crop_roi = 10; // roi: region of interest
repeated TrafficLightBox projected_roi = 11;
repeated TrafficLightBox rectified_roi = 12;
repeated TrafficLightBox debug_roi = 13;
}其中,TrafficLightBox 表示一个框框,这个框框的信息如下所示:
message TrafficLightBox {
optional int32 x = 1;
optional int32 y = 2;
optional int32 width = 3;
optional int32 height = 4;
optional TrafficLight.Color color = 5;
optional bool selected = 6;
optional string camera_name = 7;
}至此,TraficLightDetection 的分析完毕。
Stories
Stories 的作用是,描述自车相对于道路特征的位置信息,比如到路口的距离、到信号灯的距离、到交通标识牌的距离,在规划模块中有助于 scenario 判断或者某个 scenario 中 stage 之间的切换,其消息格式如下:
// Usage guide for action modules:
// 1. Call `stories.has_XXX()` to check if a story you are interested is in
// charge.
// 2. Access the story details if necessary, and take action accordingly.
message Stories {
optional apollo.common.Header header = 1;
optional CloseToClearArea close_to_clear_area = 2;
optional CloseToCrosswalk close_to_crosswalk = 3;
optional CloseToJunction close_to_junction = 4;
optional CloseToSignal close_to_signal = 5;
optional CloseToStopSign close_to_stop_sign = 6;
optional CloseToYieldSign close_to_yield_sign = 7;
}其中 CloseToClearArea ,表示迷茫,
message CloseToClearArea {
optional string id = 1;
optional double distance = 2 [default = nan];
}CloseToCrosswalk 表示在接近人行横道,
message CloseToCrosswalk {
optional string id = 1;
optional double distance = 2 [default = nan];
}CloseToJunction 表示在接近路口,
message CloseToJunction {
enum JunctionType {
PNC_JUNCTION = 1;
JUNCTION = 2;
};
optional string id = 1;
optional JunctionType type = 2;
optional double distance = 3 [default = nan];
}CloseToSignal 表示在接近信号灯,
message CloseToSignal {
optional string id = 1;
optional double distance = 2 [default = nan];
}CloseToStopSign 表示在接近停车标识牌,
message CloseToStopSign {
optional string id = 1;
optional double distance = 2 [default = nan];
}CloseToYieldSign 表示在接近让行标识牌,
message CloseToYieldSign {
optional string id = 1;
optional double distance = 2 [default = nan];
}RoutingResponse
RoutingResponse 为一次 routing 的输出结果,属于基于 topo graph 进行的车道线级别的全局规划,在 planning 模块中调用 RoutingResponse,然后进行局部规划,其中 topo graph 是基于 HD map 生成的,具备车道线级别的信息。RoutingResponse 的消息格式如下:
message RoutingResponse {
optional apollo.common.Header header = 1;
repeated RoadSegment road = 2;
optional Measurement measurement = 3;
optional RoutingRequest routing_request = 4;
// the map version which is used to build road graph
optional bytes map_version = 5;
optional apollo.common.StatusPb status = 6;
}其中主要信息是包含了多个 RoadSegment,这是一段路,起点至终点全局路径的纵向分割,这里要想清楚一个问题,根据什么规则分割更有效率?欢迎讨论,其消息格式如下:
message RoadSegment {
optional string id = 1;
repeated Passage passage = 2;
}发现 RoadSegment 在形式上很简单,主要是包含多个 Passage,而 Passage 就是横向分割,即车道,每一段路都可能有多个车道,当然也可以只有1个,再来看 Passage 的消息格式:
message Passage {
repeated LaneSegment segment = 1;
optional bool can_exit = 2;
optional ChangeLaneType change_lane_type = 3 [default = FORWARD];
}可见每个 Passage 又包含多个 LaneSegment,两外还包含了是否可通行、接下来的变道方式,先说后两个简单的。
车道是否可通行很容易理解,比如,某段车道施工。
至于变道方式,这段车道行驶时,下一时刻的状态可能包含三种,保持原车道、向右变道或向左变道,因此 ChangeLaneType 如下:
enum ChangeLaneType {
FORWARD = 0;
LEFT = 1;
RIGHT = 2;
};你可能觉得先后经过纵向和横向的切割,Passage 已经是最小的道路单元了,然而并不是,举一个简单的例子,全局规划的起点和终点总是道路上的一个点,在地图上是个坐标,这个坐标不可能刚好落在 Passage 的端点,这个时候,就需要把 Passage 进行纵向切割,实际上同时需要将与其并列的 Passage 进行同比例分割,这就有了 LaneSegment,还有些时候,车道上的某一段明显的通行效率低,甚至无法通行,为提高全局规划效率,同样需要将 Passage 的进行纵向切割。如果能理解到这里,那么对于 LaneSegment 该如何定义想必就有思路了,老样子,id 必须有,然后就是起点和终点分别距离 Passage 起点的距离,如下所示:
message LaneSegment {
optional string id = 1;
optional double start_s = 2;
optional double end_s = 3;
}LocalizationEstimate
LocalizationEstimate 主要包含两个方面的信息,其一为自车实时的位姿及相应的标准差,其二为自车轨迹点的预测,其他的就是时间戳、各传感器的一致性及其状态,如下所示:
message LocalizationEstimate {
optional apollo.common.Header header = 1;
optional apollo.localization.Pose pose = 2;
optional Uncertainty uncertainty = 3;
// The time of pose measurement, seconds since 1970-1-1 (UNIX time).
optional double measurement_time = 4; // In seconds.
// Future trajectory actually driven by the drivers
repeated apollo.common.TrajectoryPoint trajectory_point = 5;
// msf status
optional MsfStatus msf_status = 6;
// msf quality
optional MsfSensorMsgStatus sensor_status = 7;
}对于自车实时的信息,没必要过多解释,这是定位模块的基本功能,Pose 的消息格式如下:
message Pose {
// Position of the vehicle reference point (VRP) in the map reference frame.
// The VRP is the center of rear axle.
optional apollo.common.PointENU position = 1;
// A quaternion that represents the rotation from the IMU coordinate
// (Right/Forward/Up) to the
// world coordinate (East/North/Up).
optional apollo.common.Quaternion orientation = 2;
// Linear velocity of the VRP in the map reference frame.
// East/north/up in meters per second.
optional apollo.common.Point3D linear_velocity = 3;
// Linear acceleration of the VRP in the map reference frame.
// East/north/up in meters per square second.
optional apollo.common.Point3D linear_acceleration = 4;
// Angular velocity of the vehicle in the map reference frame.
// Around east/north/up axes in radians per second.
optional apollo.common.Point3D angular_velocity = 5;
// Heading
// The heading is zero when the car is facing East and positive when facing
// North.
optional double heading = 6;
// Linear acceleration of the VRP in the vehicle reference frame.
// Right/forward/up in meters per square second.
optional apollo.common.Point3D linear_acceleration_vrf = 7;
// Angular velocity of the VRP in the vehicle reference frame.
// Around right/forward/up axes in radians per second.
optional apollo.common.Point3D angular_velocity_vrf = 8;
// Roll/pitch/yaw that represents a rotation with intrinsic sequence z-x-y.
// in world coordinate (East/North/Up)
// The roll, in (-pi/2, pi/2), corresponds to a rotation around the y-axis.
// The pitch, in [-pi, pi), corresponds to a rotation around the x-axis.
// The yaw, in [-pi, pi), corresponds to a rotation around the z-axis.
// The direction of rotation follows the right-hand rule.
optional apollo.common.Point3D euler_angles = 9;
}Uncertainty 中主要是 pose 参数的标准差,如下所示:
message Uncertainty {
// Standard deviation of position, east/north/up in meters.
optional apollo.common.Point3D position_std_dev = 1;
// Standard deviation of quaternion qx/qy/qz, unitless.
optional apollo.common.Point3D orientation_std_dev = 2;
// Standard deviation of linear velocity, east/north/up in meters per second.
optional apollo.common.Point3D linear_velocity_std_dev = 3;
// Standard deviation of linear acceleration, right/forward/up in meters per
// square second.
optional apollo.common.Point3D linear_acceleration_std_dev = 4;
// Standard deviation of angular velocity, right/forward/up in radians per
// second.
optional apollo.common.Point3D angular_velocity_std_dev = 5;
// TODO: Define covariance items when needed.
}对于自车轨迹点的预测,我认为可以借助上个规划周期的规划结果来进行自车的轨迹预测,从而对动态障碍物做出合理的反应,因此是包含多个时刻的 TrajectoryPoint 的,其消息格式如下所示:
message TrajectoryPoint {
// path point
optional PathPoint path_point = 1;
// linear velocity
optional double v = 2; // in [m/s]
// linear acceleration
optional double a = 3;
// relative time from beginning of the trajectory
optional double relative_time = 4;
// longitudinal jerk
optional double da = 5;
// The angle between vehicle front wheel and vehicle longitudinal axis
optional double steer = 6;
// Gaussian probability information
optional GaussianInfo gaussian_info = 7;
}其中,PathPoint 为道路上的某一点,包含点的坐标、以及道路在此处的走向、曲率等信息,如下所示:
message PathPoint {
// coordinates
optional double x = 1;
optional double y = 2;
optional double z = 3;
// direction on the x-y plane
optional double theta = 4;
// curvature on the x-y planning
optional double kappa = 5;
// accumulated distance from beginning of the path
optional double s = 6;
// derivative of kappa w.r.t s.
optional double dkappa = 7;
// derivative of derivative of kappa w.r.t s.
optional double ddkappa = 8;
// The lane ID where the path point is on
optional string lane_id = 9;
// derivative of x and y w.r.t parametric parameter t in CosThetareferenceline
optional double x_derivative = 10;
optional double y_derivative = 11;
}Chassis
Chassis 为从 can 上获取的自车底盘信息,这些都比较容易理解,不做过多解释,如下所示:
message Chassis {
enum DrivingMode {
COMPLETE_MANUAL = 0; // human drive
COMPLETE_AUTO_DRIVE = 1;
AUTO_STEER_ONLY = 2; // only steer
AUTO_SPEED_ONLY = 3; // include throttle and brake
// security mode when manual intervention happens, only response status
EMERGENCY_MODE = 4;
}
enum ErrorCode {
NO_ERROR = 0;
CMD_NOT_IN_PERIOD = 1; // control cmd not in period
// car chassis report error, like steer, brake, throttle, gear fault
CHASSIS_ERROR = 2;
// classify the types of the car chassis errors
CHASSIS_ERROR_ON_STEER = 6;
CHASSIS_ERROR_ON_BRAKE = 7;
CHASSIS_ERROR_ON_THROTTLE = 8;
CHASSIS_ERROR_ON_GEAR = 9;
MANUAL_INTERVENTION = 3; // human manual intervention
// receive car chassis can frame not in period
CHASSIS_CAN_NOT_IN_PERIOD = 4;
UNKNOWN_ERROR = 5;
}
enum GearPosition {
GEAR_NEUTRAL = 0;
GEAR_DRIVE = 1;
GEAR_REVERSE = 2;
GEAR_PARKING = 3;
GEAR_LOW = 4;
GEAR_INVALID = 5;
GEAR_NONE = 6;
}
optional bool engine_started = 3;
// Engine speed in RPM.
optional float engine_rpm = 4 [default = nan];
// Vehicle Speed in meters per second.
optional float speed_mps = 5 [default = nan];
// Vehicle odometer in meters.
optional float odometer_m = 6 [default = nan];
// Fuel range in meters.
optional int32 fuel_range_m = 7;
// Real throttle location in [%], ranging from 0 to 100.
optional float throttle_percentage = 8 [default = nan];
// Real brake location in [%], ranging from 0 to 100.
optional float brake_percentage = 9 [default = nan];
// Real steering location in [%], ranging from -100 to 100.
// steering_angle / max_steering_angle
// Clockwise: negative
// CountClockwise: positive
optional float steering_percentage = 11 [default = nan];
// Applied steering torque in [Nm].
optional float steering_torque_nm = 12 [default = nan];
// Parking brake status.
optional bool parking_brake = 13;
// Light signals.
optional bool high_beam_signal = 14 [deprecated = true];
optional bool low_beam_signal = 15 [deprecated = true];
optional bool left_turn_signal = 16 [deprecated = true];
optional bool right_turn_signal = 17 [deprecated = true];
optional bool horn = 18 [deprecated = true];
optional bool wiper = 19;
optional bool disengage_status = 20 [deprecated = true];
optional DrivingMode driving_mode = 21 [default = COMPLETE_MANUAL];
optional ErrorCode error_code = 22 [default = NO_ERROR];
optional GearPosition gear_location = 23;
// timestamp for steering module
optional double steering_timestamp = 24; // In seconds, with 1e-6 accuracy
// chassis also needs it own sending timestamp
optional apollo.common.Header header = 25;
optional int32 chassis_error_mask = 26 [default = 0];
optional apollo.common.VehicleSignal signal = 27;
// Only available for Lincoln now
optional ChassisGPS chassis_gps = 28;
optional apollo.common.EngageAdvice engage_advice = 29;
optional WheelSpeed wheel_speed = 30;
optional Surround surround = 31;
// Vehicle registration information
optional License license = 32 [deprecated = true];
// Real gear location.
// optional int32 gear_location = 10 [deprecated = true]; deprecated use enum
// replace this [id 23]
optional apollo.common.VehicleID vehicle_id = 33;
optional int32 battery_soc_percentage = 34 [default = -1];
}其中,ChassisGPS 如下:
message ChassisGPS {
optional double latitude = 1;
optional double longitude = 2;
optional bool gps_valid = 3;
optional int32 year = 4;
optional int32 month = 5;
optional int32 day = 6;
optional int32 hours = 7;
optional int32 minutes = 8;
optional int32 seconds = 9;
optional double compass_direction = 10;
optional double pdop = 11;
optional bool is_gps_fault = 12;
optional bool is_inferred = 13;
optional double altitude = 14;
optional double heading = 15;
optional double hdop = 16;
optional double vdop = 17;
optional GpsQuality quality = 18;
optional int32 num_satellites = 19;
optional double gps_speed = 20;
}
enum GpsQuality {
FIX_NO = 0;
FIX_2D = 1;
FIX_3D = 2;
FIX_INVALID = 3;
}WheelSpeed 如下:
message WheelSpeed {
enum WheelSpeedType {
FORWARD = 0;
BACKWARD = 1;
STANDSTILL = 2;
INVALID = 3;
}
optional bool is_wheel_spd_rr_valid = 1 [default = false];
optional WheelSpeedType wheel_direction_rr = 2 [default = INVALID];
optional double wheel_spd_rr = 3 [default = 0.0];
optional bool is_wheel_spd_rl_valid = 4 [default = false];
optional WheelSpeedType wheel_direction_rl = 5 [default = INVALID];
optional double wheel_spd_rl = 6 [default = 0.0];
optional bool is_wheel_spd_fr_valid = 7 [default = false];
optional WheelSpeedType wheel_direction_fr = 8 [default = INVALID];
optional double wheel_spd_fr = 9 [default = 0.0];
optional bool is_wheel_spd_fl_valid = 10 [default = false];
optional WheelSpeedType wheel_direction_fl = 11 [default = INVALID];
optional double wheel_spd_fl = 12 [default = 0.0];
}Surround 如下:
message Surround {
optional bool cross_traffic_alert_left = 1;
optional bool cross_traffic_alert_left_enabled = 2;
optional bool blind_spot_left_alert = 3;
optional bool blind_spot_left_alert_enabled = 4;
optional bool cross_traffic_alert_right = 5;
optional bool cross_traffic_alert_right_enabled = 6;
optional bool blind_spot_right_alert = 7;
optional bool blind_spot_right_alert_enabled = 8;
optional double sonar00 = 9;
optional double sonar01 = 10;
optional double sonar02 = 11;
optional double sonar03 = 12;
optional double sonar04 = 13;
optional double sonar05 = 14;
optional double sonar06 = 15;
optional double sonar07 = 16;
optional double sonar08 = 17;
optional double sonar09 = 18;
optional double sonar10 = 19;
optional double sonar11 = 20;
optional bool sonar_enabled = 21;
optional bool sonar_fault = 22;
repeated double sonar_range = 23;
repeated Sonar sonar = 24;
}
message Sonar {
optional double range = 1; // Meter
optional apollo.common.Point3D translation = 2; // Meter
optional apollo.common.Quaternion rotation = 3;
}EngageAdvice 如下:
// This is the engage advice that published by critical runtime modules.
message EngageAdvice {
enum Advice {
UNKNOWN = 0;
DISALLOW_ENGAGE = 1;
READY_TO_ENGAGE = 2;
KEEP_ENGAGED = 3;
PREPARE_DISENGAGE = 4;
}
optional Advice advice = 1 [default = DISALLOW_ENGAGE];
optional string reason = 2;
}以上就是 planning 模块主要的输入信息,接下来看一下输出信息,其实就是 ADCTrajectory 这个消息类型。
ADCTrajectory
ADCTrajectory 名为轨迹,要明确其不同于路径,轨迹不仅包含了行驶路线,还包含了每个时刻车辆的速度、加速度、方向转向等信息,车辆的行驶轨迹是由一系列的点来描述的,其中主要是 TrajectoryPoint 和 PathPoint,而这两个消息结构在上面 LocalizationEstimate 中已经有过说明。
message ADCTrajectory {
optional apollo.common.Header header = 1;
optional double total_path_length = 2; // in meters
optional double total_path_time = 3; // in seconds
// path data + speed data
repeated apollo.common.TrajectoryPoint trajectory_point = 12;
optional EStop estop = 6;
// path point without speed info
repeated apollo.common.PathPoint path_point = 13;
// is_replan == true mean replan triggered
optional bool is_replan = 9 [default = false];
optional string replan_reason = 22;
// Specify trajectory gear
optional apollo.canbus.Chassis.GearPosition gear = 10;
optional apollo.planning.DecisionResult decision = 14;
optional LatencyStats latency_stats = 15;
// the routing used for current planning result
optional apollo.common.Header routing_header = 16;
optional apollo.planning_internal.Debug debug = 8;
enum RightOfWayStatus {
UNPROTECTED = 0;
PROTECTED = 1;
}
optional RightOfWayStatus right_of_way_status = 17;
// lane id along current reference line
repeated apollo.hdmap.Id lane_id = 18;
// set the engage advice for based on current planning result.
optional apollo.common.EngageAdvice engage_advice = 19;
// the region where planning cares most
message CriticalRegion {
repeated apollo.common.Polygon region = 1;
}
// critical region will be empty when planning is NOT sure which region is
// critical
// critical regions may or may not overlap
optional CriticalRegion critical_region = 20;
enum TrajectoryType {
UNKNOWN = 0;
NORMAL = 1;
PATH_FALLBACK = 2;
SPEED_FALLBACK = 3;
PATH_REUSED = 4;
}
optional TrajectoryType trajectory_type = 21 [default = UNKNOWN];
// lane id along target reference line
repeated apollo.hdmap.Id target_lane_id = 23;
// output related to RSS
optional RSSInfo rss_info = 100;
}写在后面的话
这里分享一些我的拙见,不一定正确,所以就不放在前面献丑了,欢迎指正和讨论,hhh。
首先,为什么要总结 planning 的输入与输出呢?主要是樊神的那篇论文已经把 Apollo 的 EMplanner 的架构和算法思想讲解的非常透彻了,另外王方浩、保罗的酒吧、知行合一2018三位大佬的博文对于 Apollo 的解析,在整体架构、运行逻辑和源码分析三个方面也已经做的很透彻了,虽然已有的博文大多是针对 Apollo3.5 版本的源码,但还是有助于快速的熟悉 Apollo,在此基础上可以做一些有意思的事情,比如,如果你认为某个 task 中的二次优化算法比较粗暴,太依赖算力,你可以使用更巧妙的方法进行替换,但是要关注下成功率,毕竟实际情况很复杂,往往粗暴的方法成功率更高;甚至如果你觉得有些场景没有覆盖到,你可以仿照已有的形式设计scenario、stage、task,然后进行验证,验证的方法可以参考我的另外一篇博文“Apollo6.0 + lgSVL 联合仿真平台搭建”。相比之下,master 版本有功能的完善和补充,有代码的优化,解析输入输出,一方面可以帮助初学者对于 planning 模块的功能有个初步的认识,另一方面是我对新增的 learning based planning 更感兴趣。
那么输入和输出跟 learning based planning 有什么关系呢?显然,这里的输入和输出同样适用于 learning mode,但并不是直接用,而是经过处理,但是 planning 肯定不是一个简单的 regression 的问题,应该是通过 force learning 不断提升规划的质量,细心的同学应该已经发现了,开篇说了在 planning 模块中,定义了 3 个 writer,其中有个 planning_learning_data_writer_ ,这个应该就是将本周期的信息作为 training data 发布出去。
我没有车,怎么训练和验证模型的?还是一样的,lgSVL 能够满足你的需求,创造一个足够逼真的物理环境,按照你的想法选择或设计车辆模型,部署传感器,随心所欲的创建交通场景,去吧,快去让你的算法可以真正像人类驾驶员一样自我成长吧。


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











