






 本文详细解释了车辆动态中的关键参数,包括航向角(车辆真实运动方向与横轴的夹角)、横摆角(车体纵轴与大地坐标系横轴的夹角)以及车辆质心侧偏角(质心速度方向与车头指向的夹角)。同时,还阐述了轮胎侧偏角的定义,它是在轮胎坐标系下,纵向速度与合速度之间的夹角,对于理解和分析车辆行驶稳定性至关重要。
本文详细解释了车辆动态中的关键参数,包括航向角(车辆真实运动方向与横轴的夹角)、横摆角(车体纵轴与大地坐标系横轴的夹角)以及车辆质心侧偏角(质心速度方向与车头指向的夹角)。同时,还阐述了轮胎侧偏角的定义,它是在轮胎坐标系下,纵向速度与合速度之间的夹角,对于理解和分析车辆行驶稳定性至关重要。
航向角:地面坐标系下,车辆真实运动方向(即车辆质心速度)与横轴(横轴就是全局基准X轴)的夹角。航向角为图中θ
横摆角:指车体纵轴线(也就是x轴)与大地坐标系的横轴(即X轴)的夹角。
车辆质心侧偏角:指车辆质心速度方向与车头指向(即车辆的纵轴x)的夹角。
轮胎侧偏角:(**指的是在轮胎坐标系下,**而不是在车辆坐标系哈)侧偏角是指纵向速度与合速度之间的夹角, x 轴上方为正,下方为负。在不同的坐标系中,同一点的侧偏角并不相同,其计算方式为对应坐标系下的侧向速度除以纵向速度然后取反正切,正负号根据对应坐标系的x轴进行判断。
见手稿中的标注即叙述。
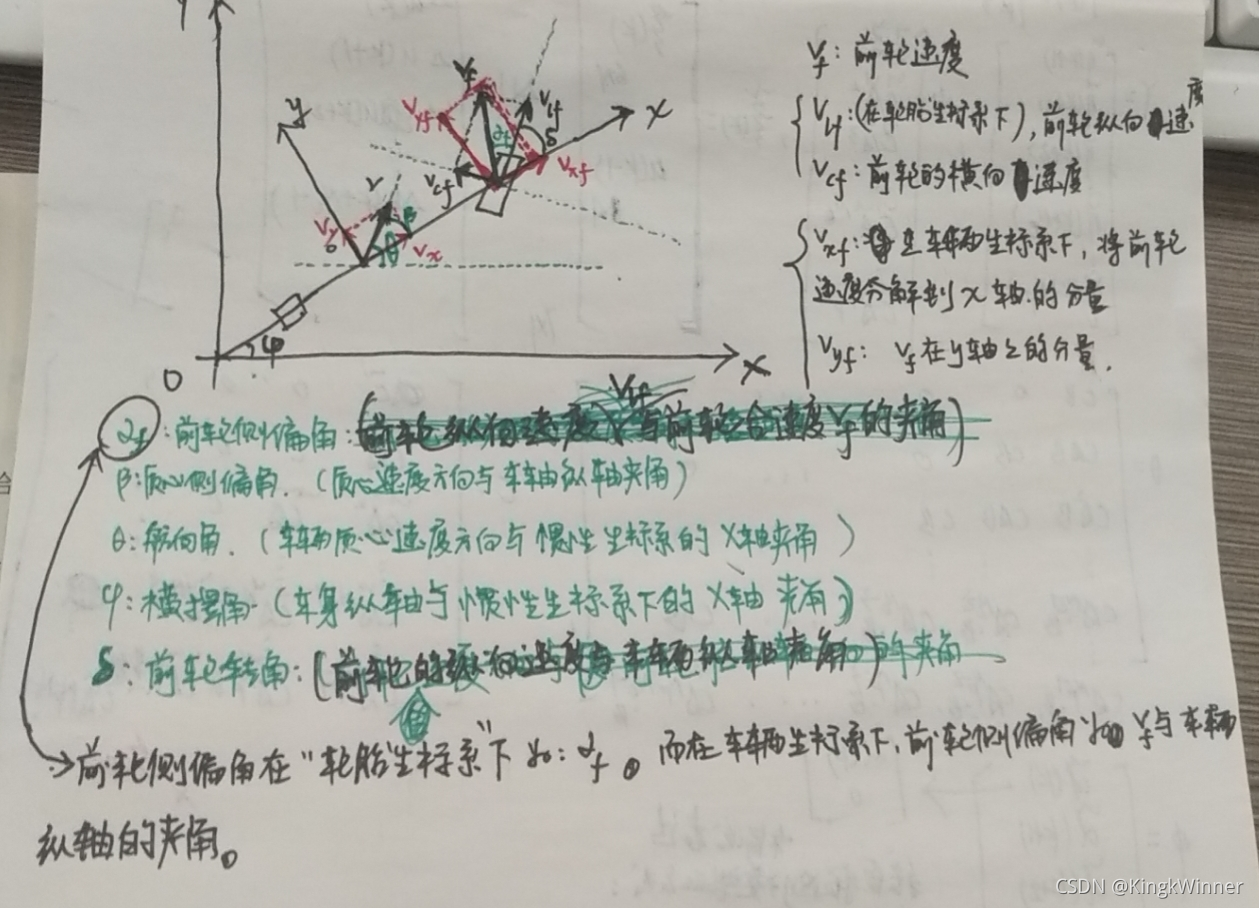
航向角,横摆角,车辆质心侧偏角,前轮侧偏角(这又可以分为在轮胎坐标系下和车辆坐标系下的前轮侧偏角哦),前轮转角
最新推荐文章于 2025-02-26 16:26:40 发布


















 6200
6200

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









