







参考:车辆运动学、航向角、偏航角、前轮转角的区别及其在MPC中的使用-CSDN博客
1.航向角 (φ)
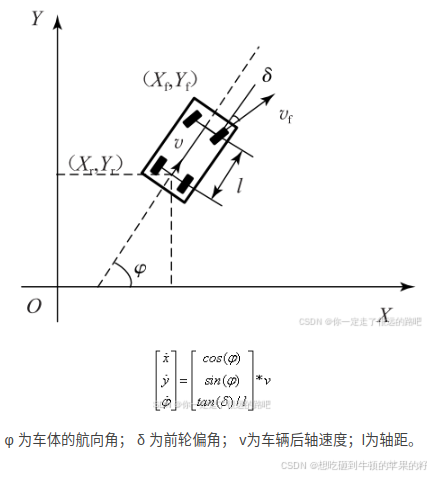
车辆航向角通常指车辆质心速度与地面坐标系X轴(图中所示)的夹角,用于描述物体在全球坐标系中的方向,常用于导航和路径规划中确定车辆的绝对方向。
坐标系:地面坐标系(如图所示的XY坐标系)
方向:顺时针为正,逆时针为负(通常是从 0 度(北方)开始,顺时针增加到 360 度)
范围: [ 0 ° , 360 ° ] [0°, 360°][0°,360°]
2.偏航角 (yaw)
偏航角是车辆自身在水平面内的旋转角度,用于描述车辆相对其纵轴(自身坐标系x轴)的旋转,常用于动态稳定控制中。偏航角通常是局部的,描述车辆在水平面内的旋转运动(如转弯时的旋转)。
坐标系:车辆自身坐标系
方向:顺时针为正,逆时针为负
范围: [ − 180 ° , 180 ° ] [-180°, 180°][−180°,180°],也可以表示为 [ − π , π ] [- \pi, \pi][−π,π] 弧度。
3.前轮转角 (δ)
前轮转角描述了前轮相对于车辆纵轴的转动角度,直接影响车辆的转弯轨迹,是驾驶员控制车辆方向的关键参数。
二、3种角在MPC中的应用
1.航向角
航向角作为MPC中的状态变量之一,描述车辆相对于地理方向的行驶方向。MPC通过控制前轮转角,使航向角与目标路径方向保持一致。
2.前轮转角
前轮转角是MPC的主要控制输入,通过调节它,MPC优化车辆的行驶轨迹,确保车辆紧跟预设路径。
3.偏航角
偏航角作为MPC的状态变量,反映车辆的实际旋转角度。MPC通过预测和调整前轮转角来控制偏航角,确保车辆姿态稳定。
三、总结
1.航向角与偏航角的比较
航向角是车辆相对于地理北方的绝对方向,是一种全局定位的角度。偏航角是车辆自身在水平面内的旋转角度,是一种相对于车辆自身的角度。在车辆控制领域,航向角常用于导航系统,而偏航角则在动态控制和姿态控制中使用较多。
2.前轮转角与偏航角的关系
前轮转角是一个控制输入,决定了车辆如何转向。偏航角是车辆姿态的输出,反映了车辆实际的方向变化。在车辆的转弯过程中,驾驶员通过调整前轮转角来控制车辆的偏航角,从而实现对车辆行驶方向的控制。
3.偏航角在MPC中的作用
在MPC控制中,前轮转角是直接的控制手段,通过调节它来控制车辆的姿态(偏航角)和方向(航向角)。MPC的优化目标是通过最优控制策略,使车辆在一定的预测时间内保持最佳的路径跟踪效果,确保车辆平稳、安全地行驶。偏航角作为状态变量,直接反映了车辆的动态姿态变化,这对于控制车辆的稳定性和路径跟踪至关重要。因此,偏航角在MPC中更适合作为状态变量。

















 6100
6100

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









