






实验室新到D435i深度相机,我想来跑跑开源算法,安装驱动各种帖子很多,我把我看到两篇最有用的帖子整理一下。帖子连接放在文末。
1. 安装Intel RealSense SDK 2.0
参考:https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.md
安装步骤:
(1) 注册服务器公钥
sudo apt-key adv --keyserver keys.gnupg.net --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
(2) 添加服务器到本机repository
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo bionic main" -u
(3) 安装库文件
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
(4) 安装developer和debug的包(Optional but Recommended)
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg
安装完成后,连接相机到计算机,运行如下命令将打开SDK:
realsense-viewer
效果如下: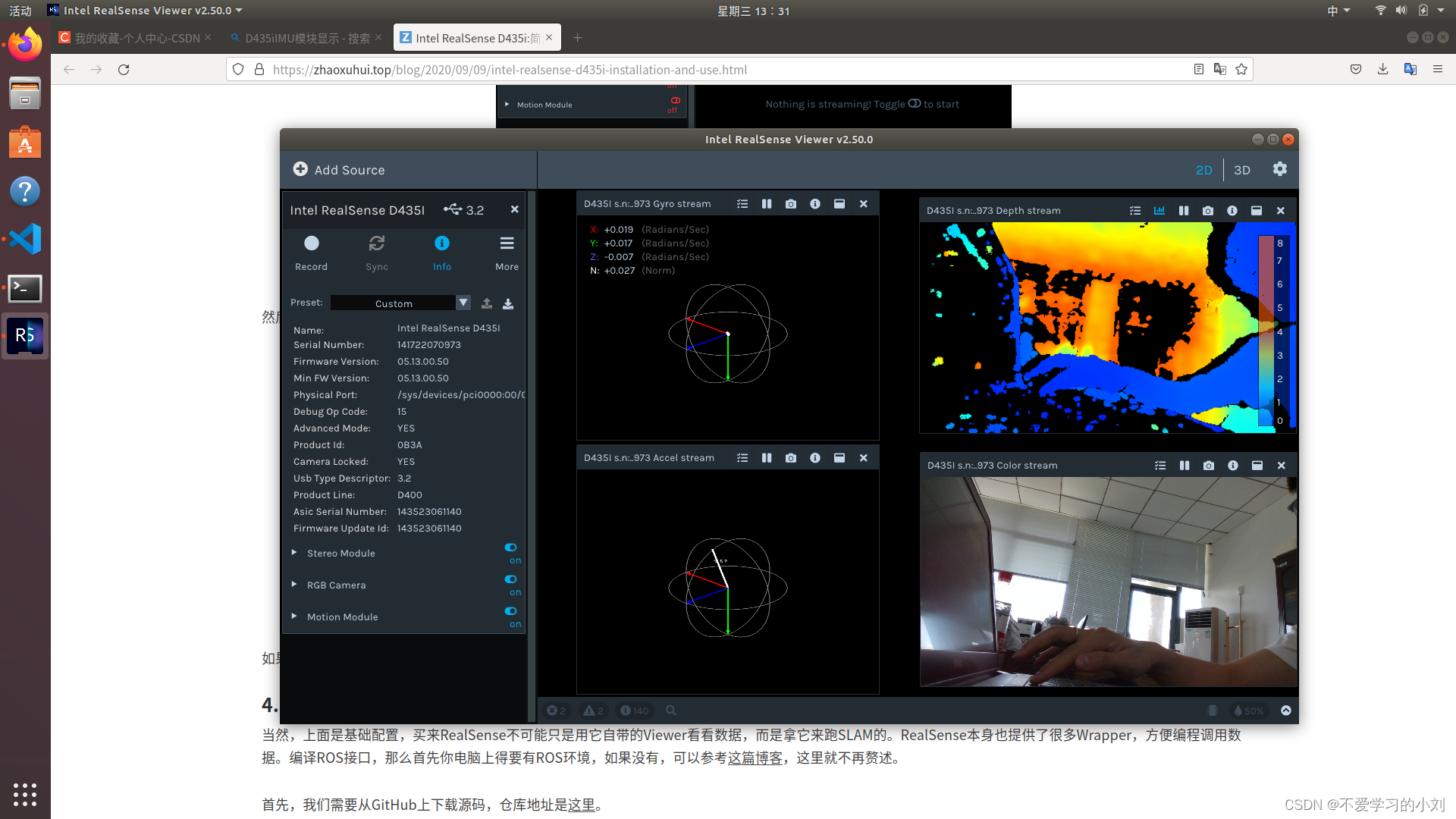
因为D435i有IMU模块,我一开始不知道怎么显示,只有在2D模式下才会显示 。
(默认安装最新,我安装的是2.50.0版本的)
2. 安装ROS Wrapper
方法一:从源码安装
源码下载地址:https://github.com/IntelRealSense/realsense-ros/releases
安装方法:参考下载文件夹内的README文件,或
https://github.com/IntelRealSense/realsense-ros#rgbd-point-cloud
进入网页后。选择对应版本的安装,我看最新的好多都是ROS2,然后我选择了2021,NOV,11的一个版本进行安装,下载源码后解压到catkin_ws/src空间下,用locate命令检查是否安装有这些ros包,没有就sudo apt-get install进行安装(一般情况下ros是full-desktop安装的都有)
ros-melodic-cv-bridge ros-melodic-image-transport ros-melodic-tf ros-melodic-diagnostic-updater ros-melodic-ddynamic-reconfigure
然后回到catkin_ws进行catkin_make。(环境变量建议直接在.bashrc里加,省好多事儿)
方法二:直接用apt安装(完全不推荐,我第一次是因为怕麻烦,直接apt安装,后来出现一大堆问题,胡乱报错,遂卸载重装,卸载命令sudo apt-get remove ros-melodic-librealsense2)
sudo apt install ros-melodic-realsense2-camera
sudo apt install ros-melodic-realsense2-description
3.运行测试
运行的时候报一个launch相关的错,直接apt安装一下
sudo apt install ros-melodic-rgbd-launch
安装完成后,运行如下命令可以启动相机节点:
(1) 发布图片
roslaunch realsense2_camera rs_camera.launch
(2) 发布点云
roslaunch realsense2_camera rs_camera.launch filters:=pointcloud
(3) 发布彩色深度图
roslaunch realsense2_camera rs_camera.launch filters:=colorizer
之前apt安装的时候,有一些话题没有发布,源码安装之后就一切正常。
参考文章的链接:(可以直接去看他们的,我写的有些杂乱,可能只有我自己能看明白)
原文链接:Ubuntu18.04下安装RealSense D435i相机的SDK和ROS包_凌波一梦的博客-CSDN博客_ubuntu18.04 安装ros















 1601
1601











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









