







 超级会员免费看
超级会员免费看
假设空间中的一个坐标系{A},表示为
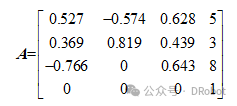
如果将这个坐标系沿着参考坐标系的Y轴移动10个单位,然后再沿着Z轴移动5个单位得到坐标系{B},求坐标系{B}的表示。
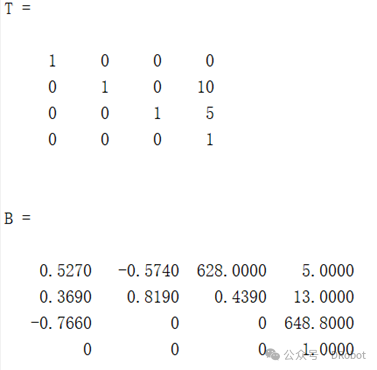
MATLAB代码:
A=[0.527,-0.574,628,5;0.369,0.819,0.439,3:-0.766,0,0,643.8:0,0,0,1]T=trans1(0,10,5)B=T*A
运行结果:
如果上式中的坐标系{A},绕X轴旋转30度,求旋转后得到的坐标系{C}。则
matlab代码:
T=trotx(pi/6)仿真结果:

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 169
169

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











