







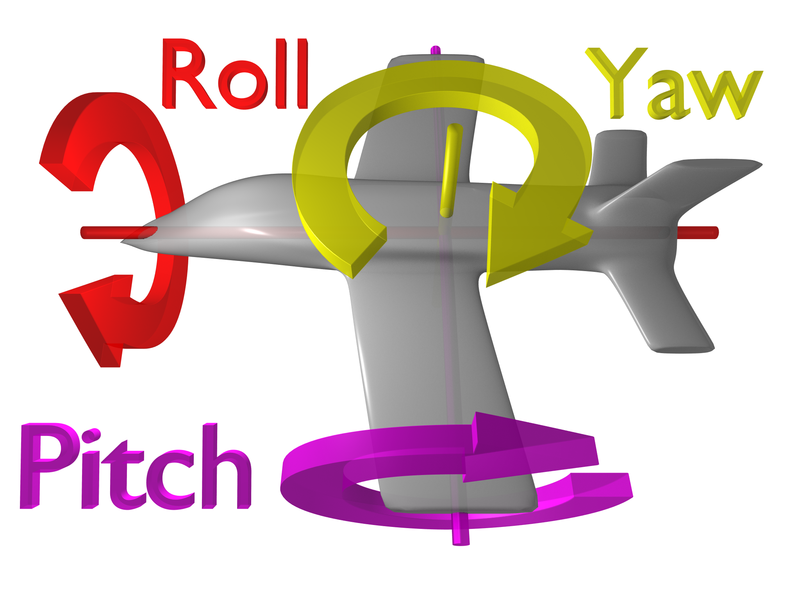
pitch yaw roll方向
roll翻滚角,顺时针翻滚即正值,逆时针翻滚为负值。如图二所示。
yaw(heading)航向角,航向角是由当地北方向旋转,正角向东增加。如图三所示。
pitch俯视角,俯仰是从局部xy平面的旋转。正螺距角在平面上方。负螺距角在平面以下。如图四所示。
 1万+
4487
7223
1万+
4487
7223

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























