







Livox Avia 的 官网 网址

该款产品的特点 是 测量距离远;FOV 大
- 测量距离远 最远探测距离 450m
- FOV 大 非重复式扫描 70.4° * 77.2° 重复式扫描 70.4° * 4.5°
量程

量程这 @100klx 和@0klx 指的是测量环境,即在100k流明环境下和0流明环境下 。 反射率是测试目标的反射率,反射率越高,探测距离越长。 表格中 100k流明下,探测10%反射率的物体的最远距离为190m。
FOV

FOV这一块即雷达的视场角。非重复式扫描和重复式扫描定义如下
非重复扫描模式
Avia视场覆盖率将随时间推移而显著提高,70度的大FOV可一次性获取更大场景的点云数据,最终形成照片般清晰的高密度点云。
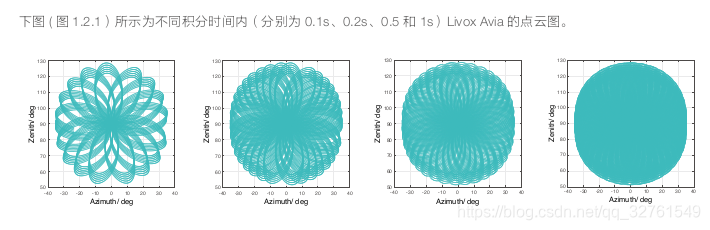
重复线性扫描模式
针对精度及点云均匀度要求更高的电力巡检, 林业测绘等场景,Avia的重复扫描模式可显著提升作业效率。独特的光斑形态可对细长物体(如电线)有更优分辨率,辅以特殊的扫描模式,带来更高测绘精度。其三回波特性亦可获得更多来自树冠、地面的点云数据。
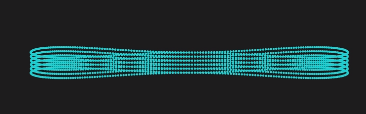
使用时可选择一种模式使用
数据同步方式

Livox Avia 的点云数据及 IMU 数据中包含时间戳信息。
Livox Avia 支持三种同步方式 :IEEE 1588-2008 同步、脉冲同步 (PPS) 和 GPS 同步 (PPS+UTC)。
- IEEE 1588-2008:IEEE 1588-2008 是指“Precision Time Protocol”即“精确时间协议”,通过以太
网对测量以及系统控制实现精确的时钟同步。Livox 激光测距探测仪,作为 PTP 中的普通时钟,仅支
持 UDP/IPv4。Livox 激光探测测距仪支持以下报文格式:Sync、Follow_up、Delay_req 以及 Delay_
resp. - PPS:脉冲同步通过同步信号线实现数据同步。脉冲同步上升沿到来时,点云中时间戳清零,因此点云数据的时间戳表示的是点云数据采样与上一个脉冲同步上升沿的间隔时间。
- GPS 同步:GPS 同步通过同步信号线和 UTC 时间实现数据同步。PPS 接口逻辑与上述 PPS 同步方式一致,用户可以通过 SDK 通信协议,将每个脉冲的 UTC 时间发送给 Avia。
IMU 传感器信息
Avia 中内置 IMU 传感器,提供 Avia 的姿态数据。
通过产科 其SDK 的 数据格式定义 IMU提供的为 陀螺仪三轴数据和加速度计三轴数据

通过数据融合可以得到 比较准确的俯仰和横滚角度 。
但是加速度计无法去校正航向角度,所以航向角度只能通过陀螺仪去积分得到,航向角度准确性会相对较低。
IMU和雷达的坐标系关系(点云坐标系 O-XYZ 和 IMU 坐标系 O’-X’Y’Z’)如下:
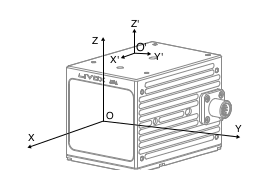
Avia的内置IMU的型号为 BMI088
博世Sensortec BMI088是一款高性能六轴惯性测量单元(IMU),具有高振动稳定性,专为无人机和机器人应用而设计。 BMI088专门设计用于有效抑制由于PCB上的共振或整个系统的结构而可能发生的振动。除了高振动稳健性外,BMI088卓越的温度稳定性有助于提高估算滤波器性能,IMU具有极宽的24G加速度计范围。
IMU官网
产品参数
| 型号 | AVIA 傲览 |
|---|---|
| 激光波长 | 905 nm |
| 人眼安全级别 | Class 1 (IEC60825-1:2014) 人眼安全 |
| 量程 (@ 100 klx) | (190 m @ 10% 反射率)( 230 m @ 20% 反射率) (320 m @ 80% 反射率) |
| 量程 (@ 0 klx) | (190 m @ 10% 反射率) (260 m @ 20%反射率) (450 m @ 80% 反射率) |
| FOV | (非重复扫描: 70.4° (水平) ×77.2° (竖直))(重复扫描: 70.4° (水平) ×4.5° (竖直)) |
| 测距随机误差 (1σ @ 20m) | 2 cm¹ |
| 角度随机误差(1σ ) | < 0.05º |
| 光束发散角度 | 0.28° (垂直) × 0.03° (水平) |
| 点云输出 | (240,000 点/秒 (可配置第一回波或最强回波))(480,000 点/秒 (双回波))(720,000 点/秒 (三回波)) |
| 数据延迟 | ≤ 2 ms |
| 数据网口 | 100 Mbps 以太网接口 |
| 数据同步方式 | IEEE 1588-2008 (PTPv2), PPS (秒脉冲), GPS |
| 虚警率 (@ 100 klx) ² | < 0.0003% |
| IMU | 内置IMU 型号: BMI088 |
| 工作环境温度 | -20℃ to 65℃ |
| 防护级别 ³ | IP67 |
| 功率 | (重复扫描模式: 9 W (启动: 16W))(非重复扫描模式: 8 W (启动: 16W))在低温环境中,Livox Avia将自动运行自加热模式,最大功率可达31W |
| 供电电压范围 | 10 ~ 15 V DC(电源转换插座 2.0: 9~30V DC ) |
| 噪音 | 40cm 全方向 <45 dBA |
| 尺寸 | 91×61.2×64.8 mm |
| 重量 | 498 g (不含线缆) |
其它
关注这款产品 是 通过 DJI 发布的L1激光雷达云台

其中的雷达就是 这款(通过对比参数)
DJI L1 官网
合作伙伴同样也有DJI

使用Avia 在 点云重建、SLAM、自动驾驶等领域 均可 发挥其作用。



















 897
897

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











