







激光雷达:Ouster 产品介绍及使用方法
前言
Ouster 公司简介
Ouster Inc.成立于2015年,由激光雷达领域内独角兽Quanergy的前联合创始人Angus Pacala创立,总部设置在美国旧金山。
它是一家激光雷达研发生产商,产品包括OS0、OS1、OS2三个系列9款激光雷达。
Ouster致力于构建用于大规模应用的新一代激光雷达传感器,致力于提高产品分辨率、可视距离和外形尺寸等参数, 基于MBF多光束闪光基础专利,结合独立ASIC IP设计实现能力,致力于为无人系统、测绘测量、安防监控、工业工程自动化、智慧交通/物流/城市等行业与场景,提供更高性能、更强可靠性、更具性价比的深度视觉产品与3D感知解决方案。
不同于传统激光雷达内部包含了数千个零部件,Ouster数字激光雷达内部只有一个芯片级激光阵列和一个CMOS传感器,大大降低了价格,提高了性能和可靠性。
Ouster 产品系列介绍
Ouster得产品系列非常简单明了,有3个系列分别是:
- OS0
- OS1
- OS2
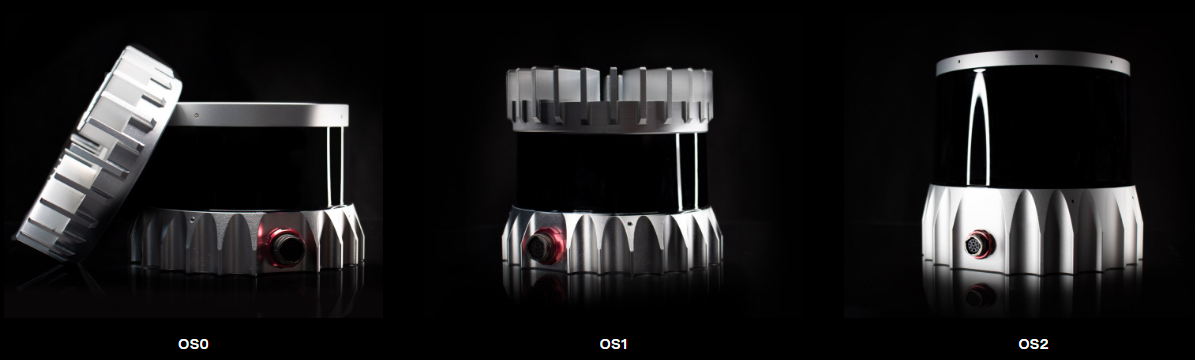
它们分别有不同得特点
OS0的主要特点是超广视场角,垂直视场角可以到90°,但是探测距离最短,为50m
OS1比较平均,垂直视场角为45°,探测距离为120m
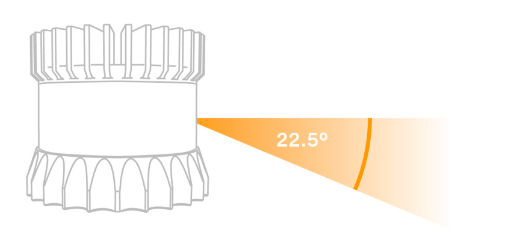
OS2的主要特点是长距离探测,垂直视场角最小为22.5°,探测距离为240m
在使用的时候根据应用场景可以选择不同系列的产品。
OS1详细介绍
由于使用的是OS1-64的产品,在这里把其参数详细介绍下。
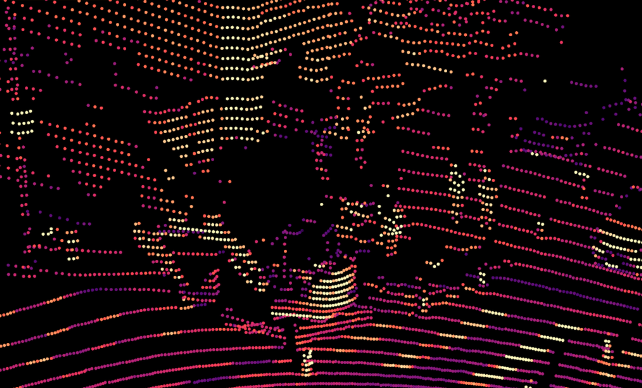
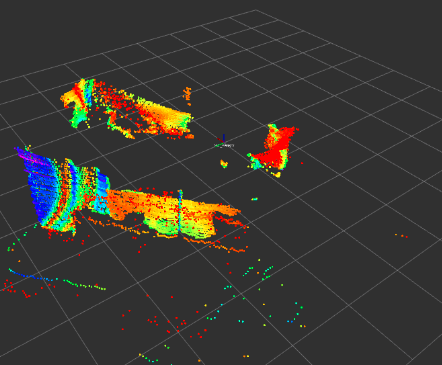
先来张一帧数据的点云图:
可以选择点云的分布形式,有三种:
- 均匀分布
- 中心加密
- 向下分布
三种的示意图如下:
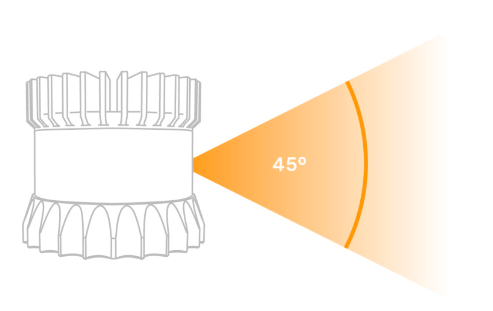
均匀分布
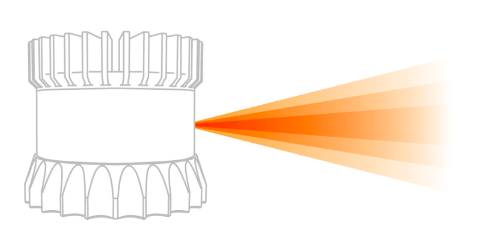
中心加密
向下分布
可以看到由于总线束是固定的64,所以越往后的垂直视场角越小。
OS1主要参数
| 水平分辨率 | 512,1024,2048 |
|---|---|
| 垂直分辨率 | 64线 |
| 探测距离 | 120 m |
| 垂直视场角 | 45° (±22.5º) |
| 垂直角分辨率 | 0.35º – 2.8º (多种选择) |
| 测量精度 | ±0.7 – 5 cm |
| 每秒点数 | 1,310,720 |
| OS1-64 | 10 Hz,20 Hz |
| 功耗 | 14 – 20 W |
| 重量 | 447 g |
| 防护等级 | IP68, IP69K |
另外激光雷达经常关注的特性也总结在下面:
- 可选PTP和NMEA/PPS时间同步
- 输出:探测距离、强度、反射率、环境近红外、方位角、时间戳
- 双回波模式,最强回波和次强回波
硬件连接
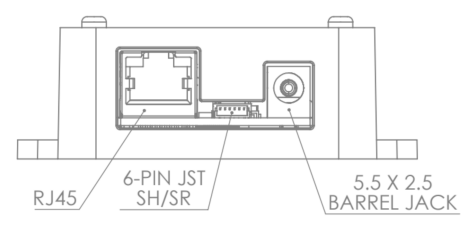
硬件连接先说个比较复杂的也是极不推荐的,就是直接连接雷达传感器的接口。
OS1 可以在没有接口盒的情况下操作。使用时,按如下所述的管脚分配进行接线。
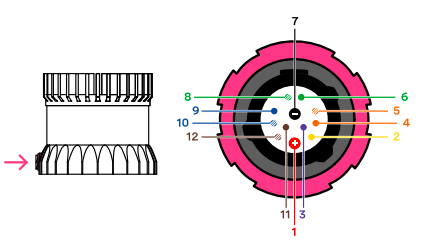

不推荐使用的理由是由于电压电流出现任何的设备损坏,厂家是不负责的。
下面看常规的使用方式,厂家也会提供一个连接器。
就是张这个样子
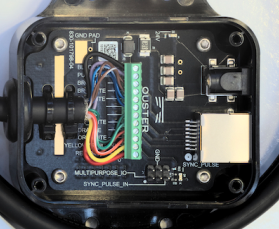
这个连接就简单了,左边那个接口连雷达,右边的网口接电脑,右边还有一个供电口,供电就行了。
还有一个GPS的时间硬件同步口,
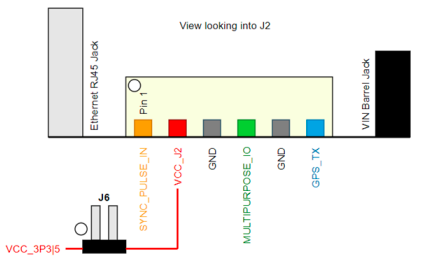
右边的侧式图如下
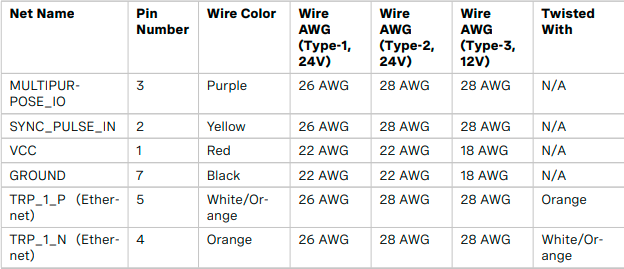
网口和供电口不用多说了,时钟同步口的各引脚定义如下:
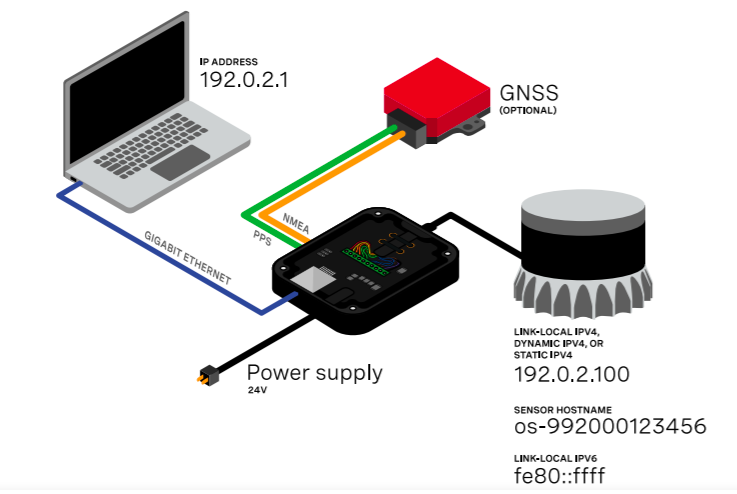
整体的连接示意图如下:
Ouster ROS驱动
ROS的版本是 Kinetic
GitHub上克隆
git clone https://github.com/ouster-lidar/ouster_example.git
然后编译 Ouster ROS
编译成功后会提示如下:

如果编译遇到如下问题:
fatal error: tclap/CmdLine.h: No such file or directory
可通过
sudo apt install libtclap-dev
解决
在ouster_example/ouster_ros路径下有os1.launch这个launch文件
roslaunch os1.launch os1_hostname:=<雷达IP> os1_udp_dest:=<本机IP> viz:=true image:=true
通过上面指令 可以运行这launch文件,
os1_hostname:=:为雷达IP地址
os1_udp_dest:=:为本机IP地址
viz:=:true - 开启 Ouster Visualizer 显示点云和2D环视图,缺省默认为false
image:=:true - 开启2D环视图节点,可在rviz中查看,缺省默认为false
lidar_mode:=: 雷达运行模式选项,可选512x10 | 512x20 | 1024x10 | 1024x20 | 2048x10, 缺省默认为1024x10
上面的指令按照需要配置下
然后在rviz里面就可以看到点云了



















 336
336

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











