引言:为了提高无人机室内定位的稳定性和多种定位方案,S系列无人机推出了基于三维雷达激光点云数据的定位方案。该方案的提出是为了改善视觉定位容易受到光照等影响导致的位置漂移。
简介
定位采用fast-lio定位算法,通过修改源码直接发布定位出来的位置信息和速度等信息。该算法主要依赖CPU的运算速度,因此需要选择合适的主控进行开发即可。
硬件:宇树雷达4DLiDAR L1 PM,ROS主控Jetson orin nano 8G
环境:ubuntu20.04,ros-noetic
步骤一: 启动fast-lio定位算法
roslaunch fast_lio mapping_velodyne.launch
等待出现如下界面,表明启动成功

同时会自动开启RVIZ,如下
步骤二:播放数据集
注意:需要到对应数据集目录下再进行如下指令操作,我的数据集在home目录下
rosbag play demo01_velodyne.bag

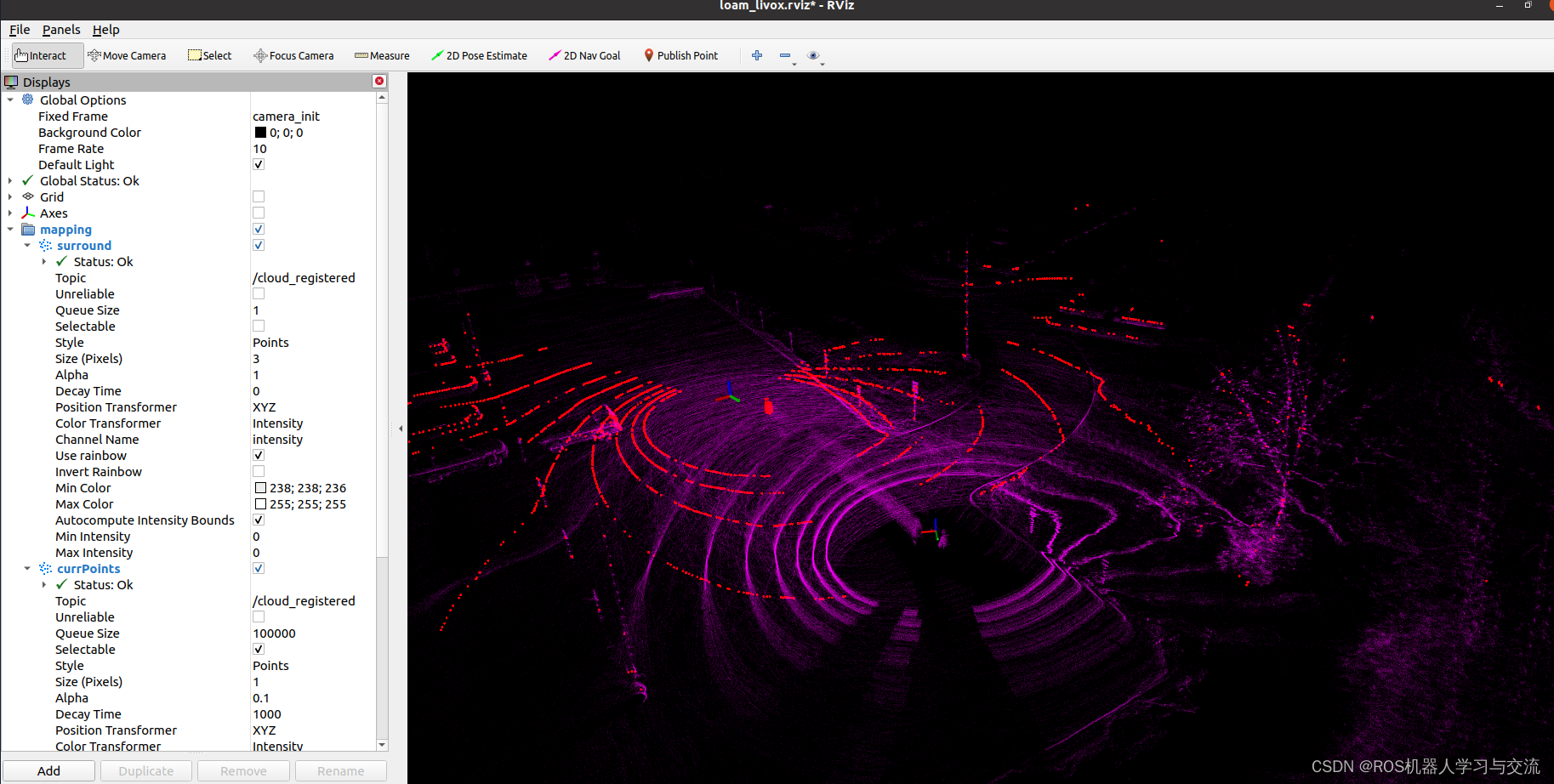
步骤三:查看RVIZ中的激光点云图
步骤四:查看定位出来的里程计信息
(1)、查看里程计话题名称
rostopic list
话题/Odometry就是雷达定位出来的里程计话题

(2)、打印里程计数据
rostopic echo /Odometry

总结:一般来说仿真数据集正常运行,表明环境配置正常。在下一小节中,我们只需要给出正确的激光scan数据即可。
建议,在不熟悉算法的情况下,最好是先进行仿真,在熟悉了流程以后在进行实物的操作,既提高了学习效率,也可以避免硬件的损坏








 本文介绍了S系列无人机采用的基于fast-lio定位算法,使用宇树雷达和JetsonNano开发,详细步骤包括启动定位算法、播放数据集、观察RVIZ和里程计信息。建议先在仿真环境下学习以确保配置正确和硬件安全。
本文介绍了S系列无人机采用的基于fast-lio定位算法,使用宇树雷达和JetsonNano开发,详细步骤包括启动定位算法、播放数据集、观察RVIZ和里程计信息。建议先在仿真环境下学习以确保配置正确和硬件安全。


















 321
321

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











