






isaac sim 和 isaac lab 中用的机器人模型一般是usd,包括了纹理等信息,比urdf中有更多的信息,而且把stl文件都打包了,只需要一个文件就可以导入。
步骤:
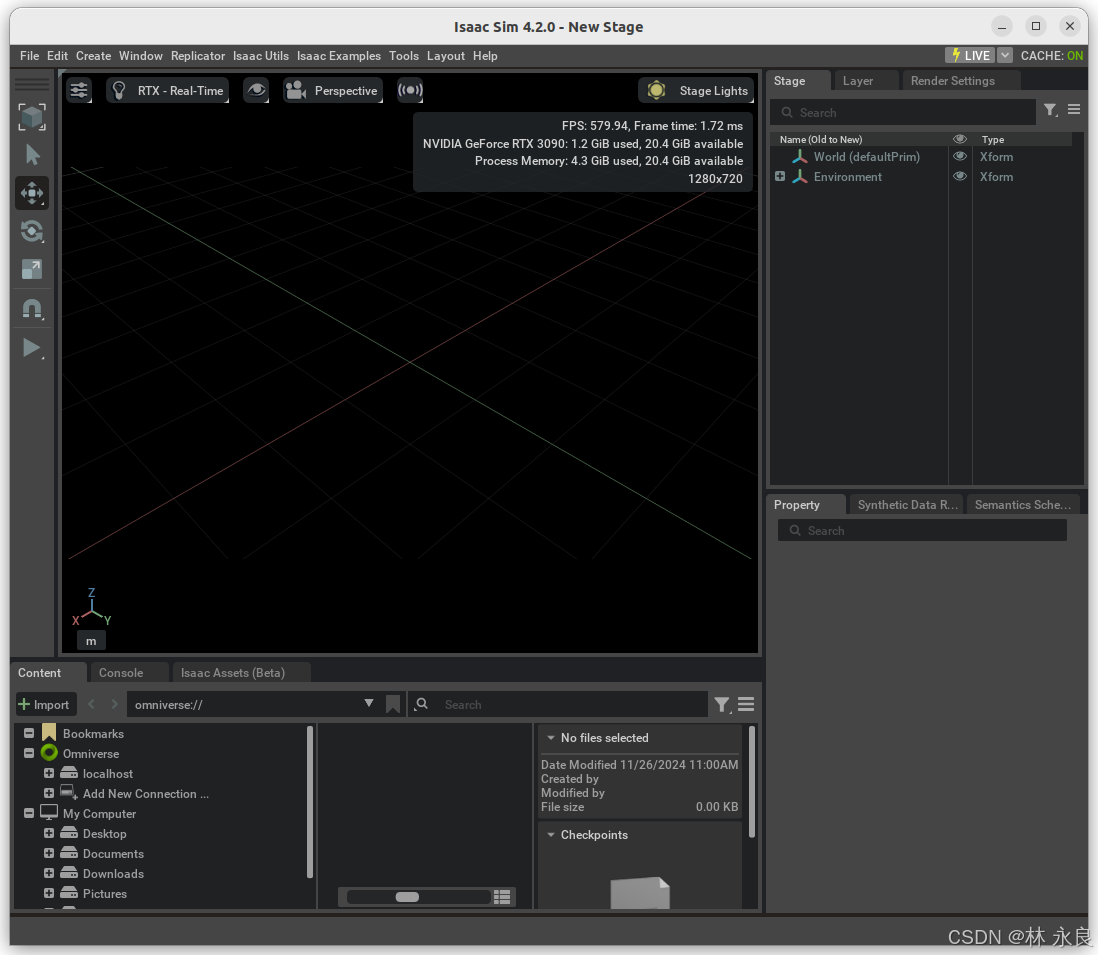
1. 打开isaac sim
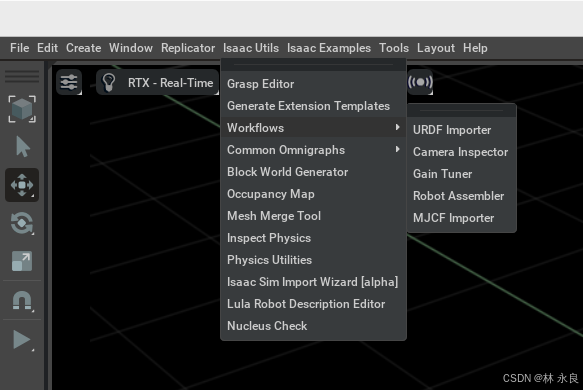
2. 打开Isaac Utils -> Workflows -> URDF Importer
3. 在 URDF Importer中设置
- 勾选 Fix Base Link
- Link Density 0.0 为自动计算
- Joint Drive Type 选择 Position
- Input File 选择自己的urdf路径
4. 调整一些外观
新建一些materials, Create -> Material -> OmniPBR,可以调整一下颜色
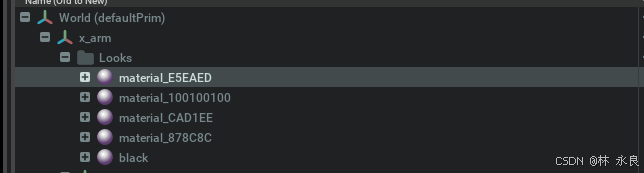
在visuals中选择这个材料就可以看到这个材料的颜色了

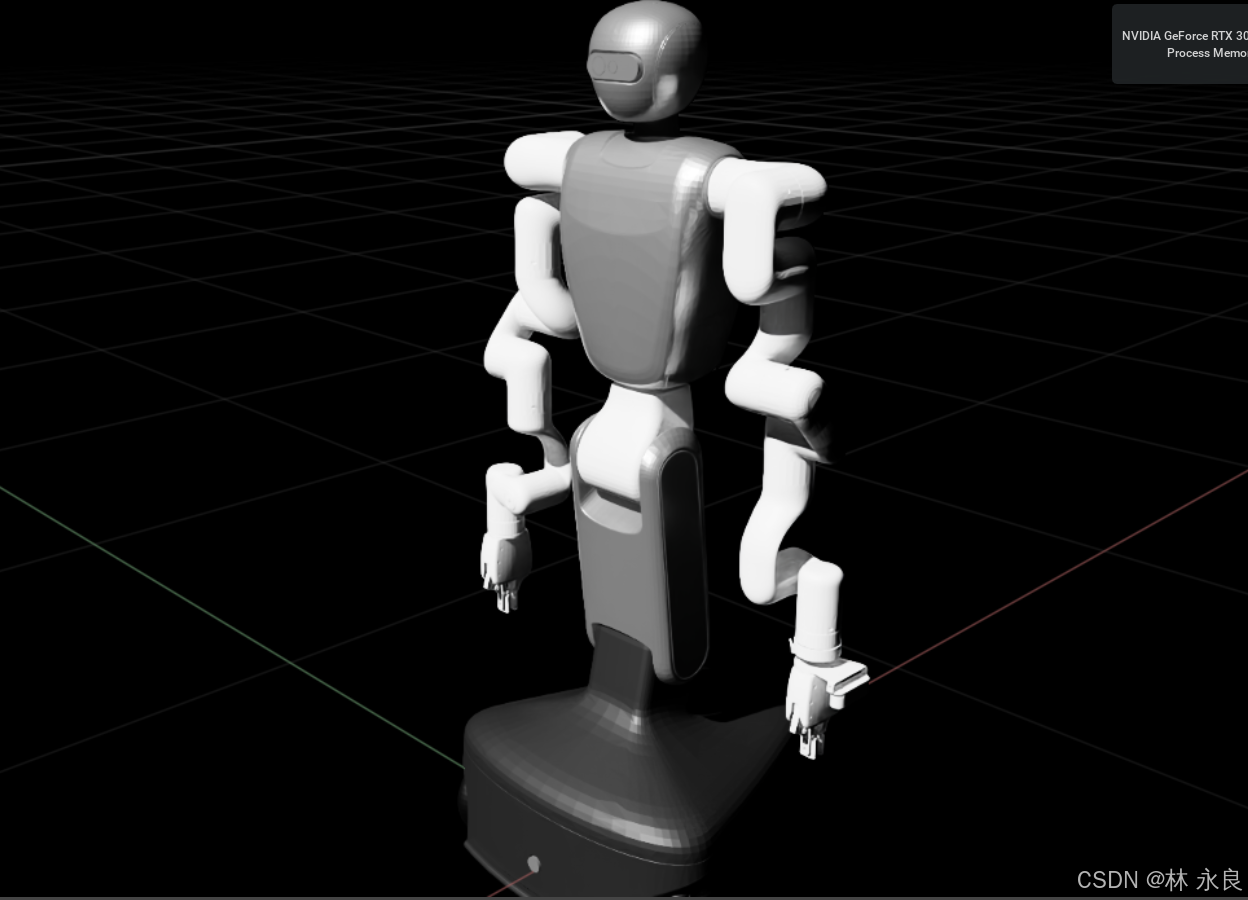
4. 选中整个机械臂的根部,我这里是这个叫做x_arm的,

然后右键选择save selected就可以导出了,导出大小应该有好几十M而不是几百K。之后导出的usd文件就可以被导入了。

















 203
203

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









