







本系列博客包括6个专栏,分别为:《自动驾驶技术概览》、《自动驾驶汽车平台技术基础》、《自动驾驶汽车定位技术》、《自动驾驶汽车环境感知》、《自动驾驶汽车决策与控制》、《自动驾驶系统设计及应用》,笔者不是自动驾驶领域的专家,只是一个在探索自动驾驶路上的小白,此系列丛书尚未阅读完,也是边阅读边总结边思考,欢迎各位小伙伴,各位大牛们在评论区给出建议,帮笔者这个小白挑出错误,谢谢!
此专栏是关于《自动驾驶技术概览》书籍的笔记。
2.环境感知传感器技术之超声波雷达
2.1 超声波雷达基本知识
- 超声波雷达:通过发射并接收40kHz的超声波,根据时间差算出障碍物距离;
- 超声波雷达测距精度:1~3cm;
- 超声波雷达类型:
- UPA:安装在汽车前后保险杠上,用于测量汽车前后障碍物的驻车雷达或倒车雷达,称为超声波驻车辅助传感器(Ultrasonic Parking Assistant,UPA);
- APA:安装在汽车侧面,用于测量侧方障碍物距离的超声波雷达,称为自动泊车辅助传感器(Automatic Parking Assistant,APA);
- 超声波雷达应用:
- 倒车辅助;
- 泊车位检测;
- 高速横向辅助;
2.2 超声波雷达工作原理
超声波发射器向外面某一个方向发射出超声波信号,在发射超声波的同时开始计时,超声波通过空气进行传播,传播途中遇到障碍物立刻反射回来,超声波接收器在接收到反射波时立即停止计时;计时器通过记录时间,测算从发射点到障碍物间的距离;在空气中超声波的传播速度为340m/s,计时器记录的时间为t,发射点到障碍物间的距离长度为s,满足:s=340t/2;
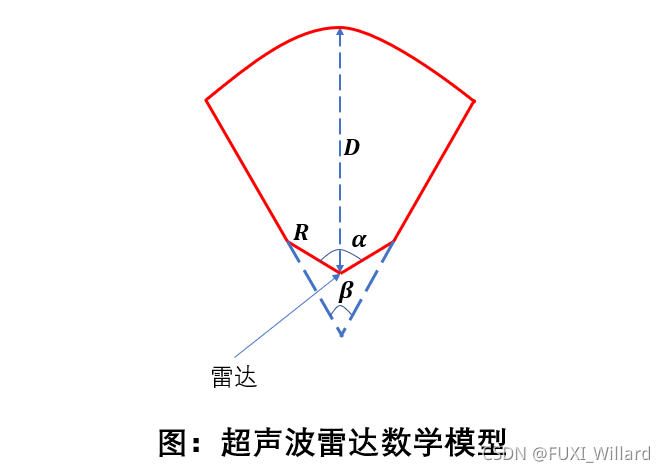
- α \alpha α为超声波雷达的探测角,一般UPA探测角为120°左右,APA探测角为80°左右;
- β \beta β为超声波雷达检测的宽度范围影响元素之一,一般UPA的 β \beta β为20°左右,APA的 β \beta β为0°;
- R是超声波雷达检测宽度范围影响元素之一,UPA和APA的R值一般0.6m左右;
- D是超声波雷达最大量程,UPA最大量程为2.5m,APA最大量程至少是5m;
2.3 超声波雷达特点
- 超声波能量消耗缓慢,防水、防尘性能好,传播距离较远,穿透性强,测距方法简单,成本低,不受光线条件的影响;
- 但超声波对温度敏感,超声波雷达的波速受温度影响,近似关系:
C
=
C
0
+
0.607
×
T
C=C_0+0.607\times{T}
C=C0+0.607×T
其 中 , C 0 为 零 度 时 的 波 速 , 为 332 m / s ; T 为 温 度 , 单 位 : ℃ 其中,C_0为零度时的波速,为332m/s;T为温度,单位:℃ 其中,C0为零度时的波速,为332m/s;T为温度,单位:℃ - 超声波散射角大,方向性较差,无法精确描述障碍物位置;


















 913
913

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











