







 这篇博客介绍了ROS的Navigation Stack,重点关注move_base节点及其组成部分,如global_planner和costmap。move_base负责全局和局部规划,处理动态障碍物。costmap是代价地图,包含静态、动态和膨胀层。MapServer提供地图服务,AMCL用于机器人定位,修正里程计误差。
这篇博客介绍了ROS的Navigation Stack,重点关注move_base节点及其组成部分,如global_planner和costmap。move_base负责全局和局部规划,处理动态障碍物。costmap是代价地图,包含静态、动态和膨胀层。MapServer提供地图服务,AMCL用于机器人定位,修正里程计误差。
所有资料均来自于 https://www.icourse163.org/learn/ISCAS-1002580008#/learn/announce
和 https://github.com/DroidAITech/ROS-Academy-for-Beginners
和 https://sychaichangkun.gitbooks.io/ros-tutorial-icourse163/content/
Navigation Stack
(https://wiki.ros.org/navigation)
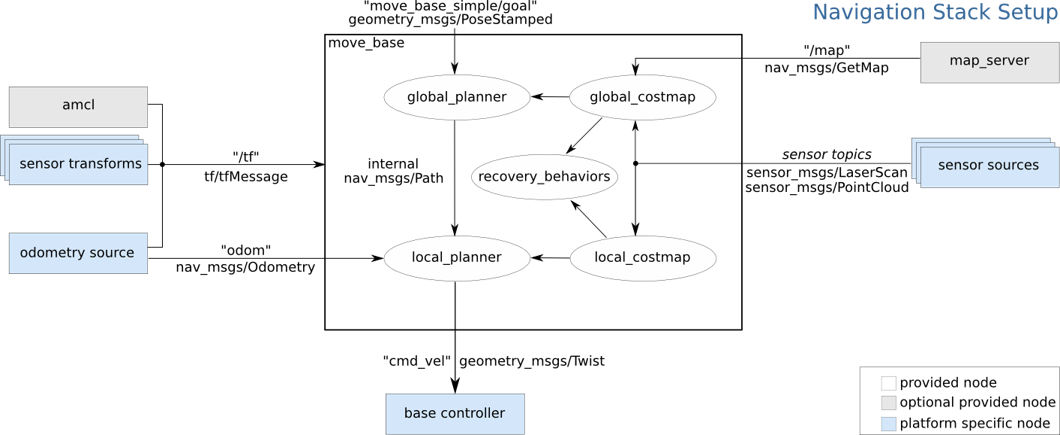
位于正中的方框是一个move_base节点。里面有global_planner、global_costmap等插件(这里的白色圆圈是插件,不是节点,插件是节点的一部分)。使用方法:灰色方框的amcl和map_server是可选的,可以用给定的地图也可以用SLAM一边行走一边
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









