







机器人学导论 二、正运动学
前言
本篇学习机械臂的正运动学,MDH法。
关节与连杆
关节joint,连杆link,是机械臂的基本组成结构。
关节包括转动关节和移动关节,一般仅有一个自由度。
一个关节把相邻两连杆连接,n个关节把n+1个连杆连接起来,具有n个自由度。
编号
把固定基座作为第0个连杆,机械臂末端的连杆作为第n个连杆。
连杆参数
连杆的描述
两个相邻关节轴之间的公垂线的长度,称为连杆的长度。
两个相邻关节轴之间形成的角度,称为连杆的转角。
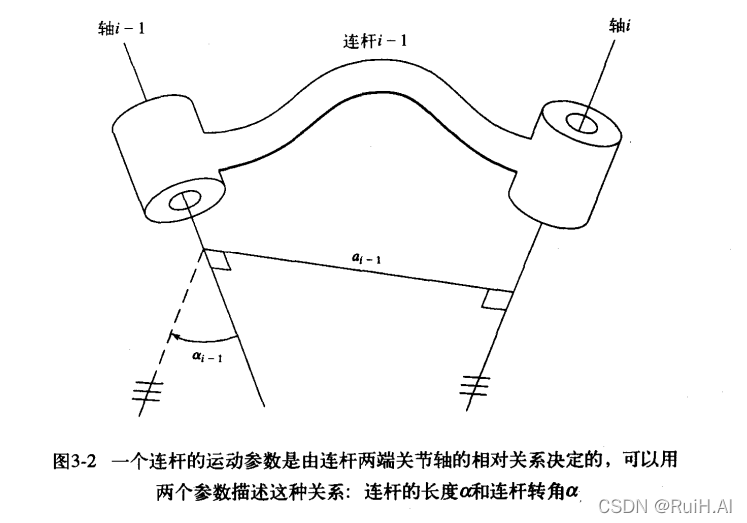
上图中,连杆i-1的长度是其近端关节轴i-1与远端关节轴i之间的公垂线长度 a i − 1 a_{i-1} ai−1
连杆i-1的转角是其近端关节轴i-1与远端关节轴i形成的角度 α i − 1 \alpha_{i-1} αi−1,至于角度的正负号,可以根据后面建立坐标系时再确定。
连杆连接的描述
两个相邻连杆之间的距离,称为连杆偏距。
两个相邻连杆绕公共关节轴旋转的夹角,称为关节角。
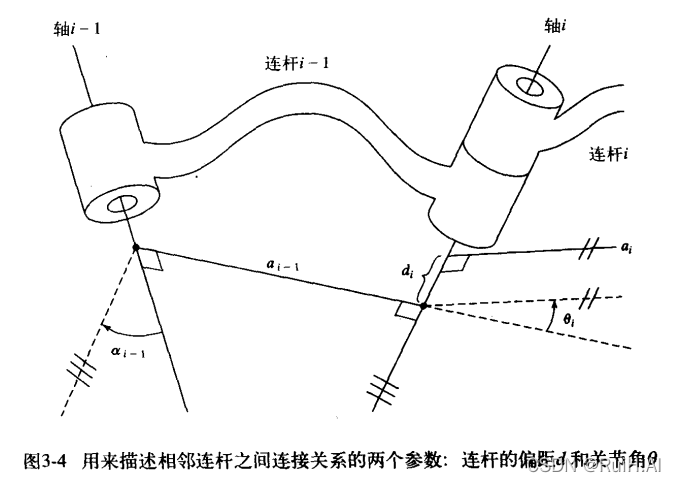
上图中,关节i是连杆i-1和连杆i的公共关节。
由于实际的连杆是弯曲的,可以将公垂线段 a i − 1 a_{i-1} ai−1和 a i a_i ai 看作代替曲连杆的直连杆i-1,i。
直连杆i-1,i之间的距离是关节i的连杆偏距 d i d_i di
直连杆i-1沿关节轴i旋转到直连杆i的角度是关节角 θ i \theta_i θi
关节变量
一个连杆可以使用上面的连杆长度、连杆转角、连杆偏距、关节角四个参数确定。
对于转动关节,关节角可变,另三个参数不变。
对于移动关节,连杆偏距可变,另三个参数不变。
可变的参数称为关节变量。
连杆坐标系
连杆坐标系用于描述相邻连杆之间的相对位置关系。
连杆坐标系编号与连杆编号相同,称为 { i } \{i\} { i}。
中间连杆坐标系建立
为连杆i建立坐标系:
以关节轴i作为Z轴,以连杆i与Z轴的交点作为原点,以连杆i作为X轴指向关节轴i+1,以右手定则确定Y轴。
例外:如果连杆i的长度 a i = 0 a_i=0 ai=0(此时连杆i,i+1的Z轴相交),以交点作为原点,以两个Z轴所在平面的垂线作为X轴,方向可以有两种选择,而 α i \alpha_i αi的符号就由X轴方向决定。
每个坐标轴的建立都要满足右手定则。
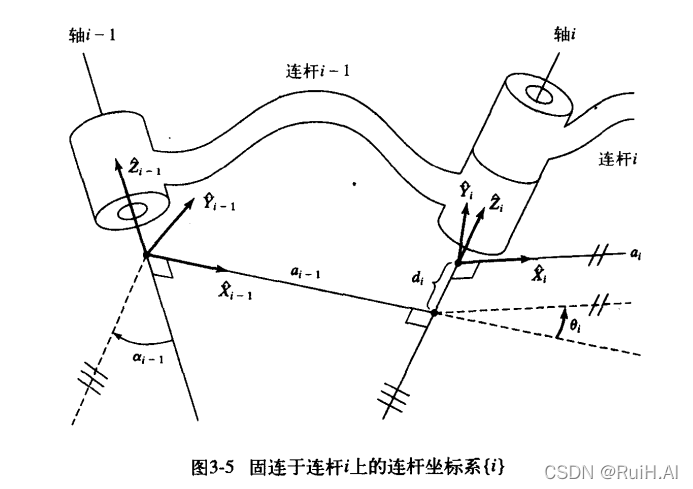
上图中,可以按这个顺序来建立坐标系:
首先找到所有的关节轴i-1,i
然后确定坐标系 { i − 1 } \{i-1\} {
i−1},以关节轴作为 Z ^ i − 1 \hat Z_{i-1} Z^i−1,直连杆i-1作为 X ^ i − 1 \hat X_{i-1} X^i−1,再右手定则确定 Y ^ i − 1 \hat Y_{i-1} Y^i−1。
然后确定坐标系 { i } \{i\} { i}。
首尾连杆坐标系建立
对于首尾连杆0,n,有特殊的建系方法。
首坐标系
坐标系 { 0 } \{0\} { 0}在基座上,一般作为参考系。
第一个关节变量为0时,规定坐标系 { 0 } \{0\} { 0}于 { 1 } \{1\} { 1}重合。
当第一个关节为转动关节, d 1 = 0 d_1=0 d1=0;第一个关节为移动关节, θ 1 = 0 \theta_1=0 θ1=0
尾坐标系
坐标系 { n } \{n\} {
n}的原点和x轴方向可以任意选取,但要尽量使得连杆参数为0。
连杆参数与连杆坐标系
按照上面的建系方法,可以把连杆参数重新定义:
- a i a_i ai连杆长度:沿 X ^ i
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1531
1531

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









